
一种集装箱自动装卸系统.pdf

王秋****哥哥


1/5

2/5

3/5

4/5

5/5
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种集装箱自动装卸系统.pdf
本发明提供一种集装箱自动装卸系统,其中所述的承载车体为平板车体结构,底部安装若干对轮子;输送及排料装置安装于承载车体的一侧,包括辊子输送装置及排料装置,排料装置安装于辊子输送装置上;输送及排料装置的另一侧为操控台,操控台的前后均安装透明玻璃;关节式工业机器人分别安装于操控台的前后两部;托盘放置及自动移载装置安装于承载车体的一端;优点为:自动完成集装箱的货物装卸工作,其装卸效率高,运行成本低。

一种空轨集装箱自动装卸系统.pdf
本发明属于集装箱多式联运相关技术领域,其公开了一种空轨集装箱自动装卸系统,所述系统包括轨道梁、连接于所述轨道梁的门形立柱、设置在轨道梁上的走行小车、连接于所述走行小车的升降机构、AGV小车、分别设置在所述走行小车及所述AGV小车上的激光发射器及激光接收器、设置在所述AGV小车上的导航通讯组件、服务器及设置在所述走行小车上的定位组件;所述服务器用于根据来自所述定位组件的位置信息及来自所述导航通讯组件的导航定位信息来判断所述走行小车及所述AGV小车的位置,并发送指令给所述走行小车及所述AGV小车以控制两者快速

全自动集装箱装卸系统.pdf
本发明一种全自动集装箱装卸系统,包括移动平台、以及搭载该移动平台的移载车;移动平台设有可调式支腿油缸,通过调节支腿油缸,可调整移动平台的高度;移动平台上设有托板台,移动平台上还搭载有折叠式传送架、拆装机器人和自动行走小车,自动行走小车可带动折叠式传送架自动走入集装箱内,自动行走小车上搭载有周转架和装卸机器人。本发明可自动完成集装箱的货物装卸工作,其装卸效率高,运行成本低。

集装箱轮胎吊自动装卸系统.pdf
本发明涉及集装箱轮胎吊自动装卸系统,通过设置于集装箱吊具上的双目视觉传感器组完成对待装卸集装箱不同角度图像信息的采集,将摄取到的被装卸集装箱的两个角度的图像传送到控制系统的主控计算机,主控计算机通过对两幅图像的处理,得到被装卸集装箱所在的三维空间位置并判断吊具与被装卸集装箱的距离,并根据上述处理结果发出控制指令,以控制大车行走、小车行走、卷扬机构升降模块和集装箱吊具装夹,可以完成对集装箱的识别、定位和自动装卸。
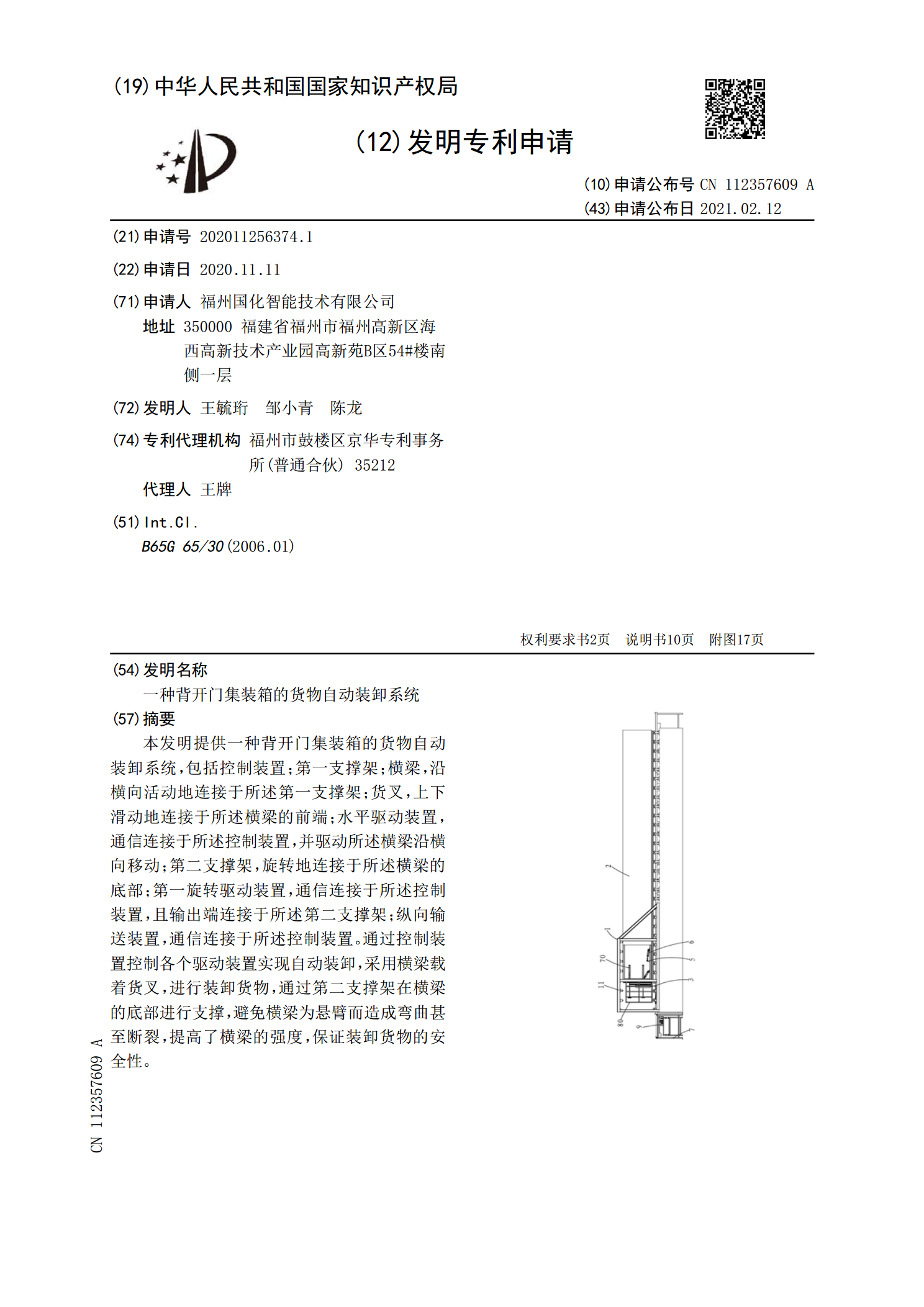
一种背开门集装箱的货物自动装卸系统.pdf
本发明提供一种背开门集装箱的货物自动装卸系统,包括控制装置;第一支撑架;横梁,沿横向活动地连接于所述第一支撑架;货叉,上下滑动地连接于所述横梁的前端;水平驱动装置,通信连接于所述控制装置,并驱动所述横梁沿横向移动;第二支撑架,旋转地连接于所述横梁的底部;第一旋转驱动装置,通信连接于所述控制装置,且输出端连接于所述第二支撑架;纵向输送装置,通信连接于所述控制装置。通过控制装置控制各个驱动装置实现自动装卸,采用横梁载着货叉,进行装卸货物,通过第二支撑架在横梁的底部进行支撑,避免横梁为悬臂而造成弯曲甚至断裂,提