
机器人标定系统、距离测量装置及标定方法.pdf

努力****凌芹


1/10
2/10

3/10
4/10
5/10
6/10

7/10

8/10
9/10

10/10
亲,该文档总共17页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
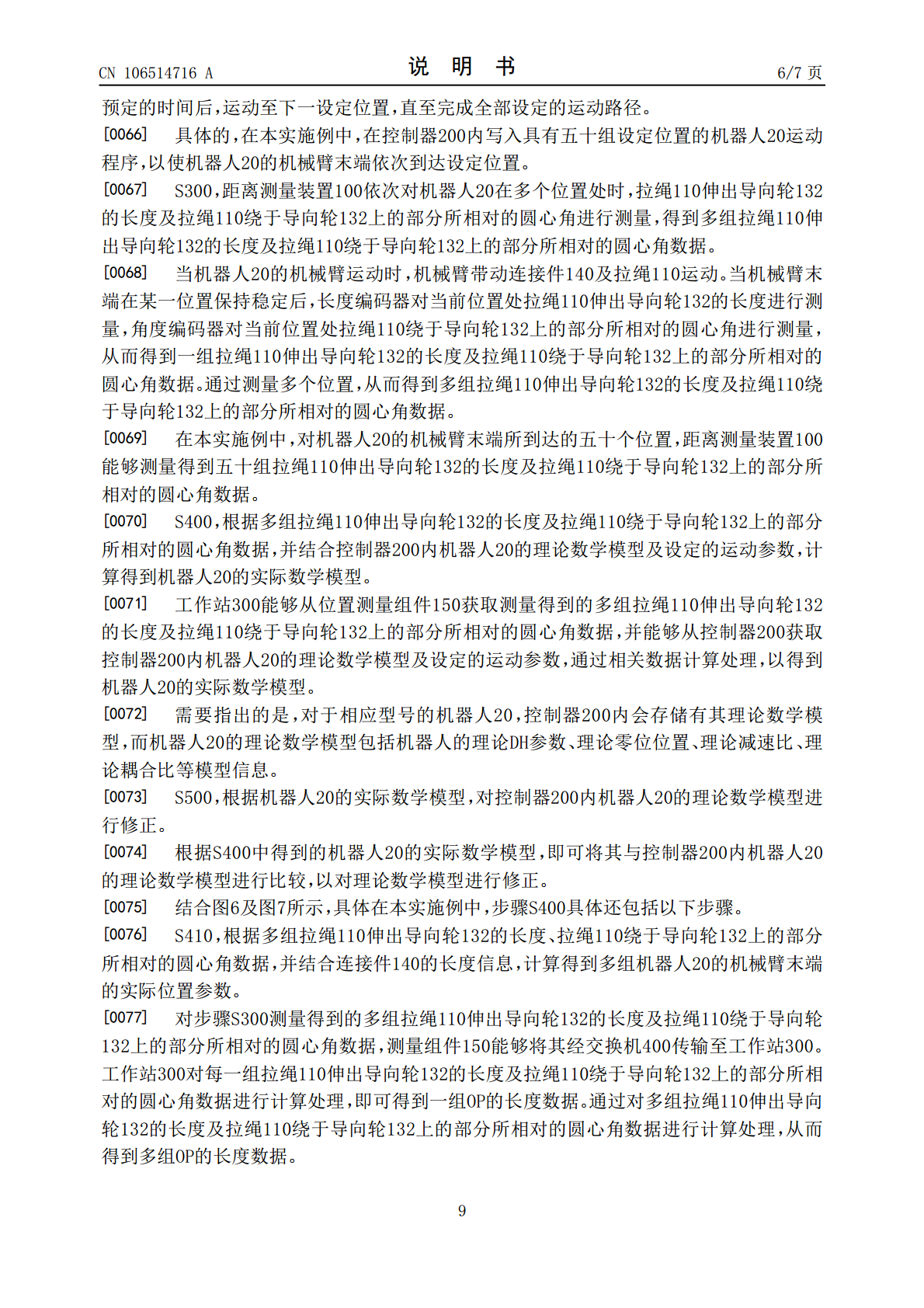
机器人标定系统、距离测量装置及标定方法.pdf
本发明涉及一种机器人标定系统、距离测量装置及标定方法。上述距离测量装置中,仅需要机器人的机械臂的末端带动连接件运动,以改变拉绳伸出导向轮的长度及拉绳绕于导向轮上的部分所相对的圆心角,并通过测量组件对拉绳伸出导向轮的长度及拉绳绕于导向轮上的部分所相对的圆心角数据进行采集,即可以得到机器人机械臂末端的位置,测量过程简单快捷,且测量不受测量环境的影响,测量精度较高。上述机器人标定系统结构简单,便于携带,可在工业现场随时对机器人进行快速标定,操作简单便捷。而且,其不易受环境影响,标定精度较高。同时,上述机器人标定
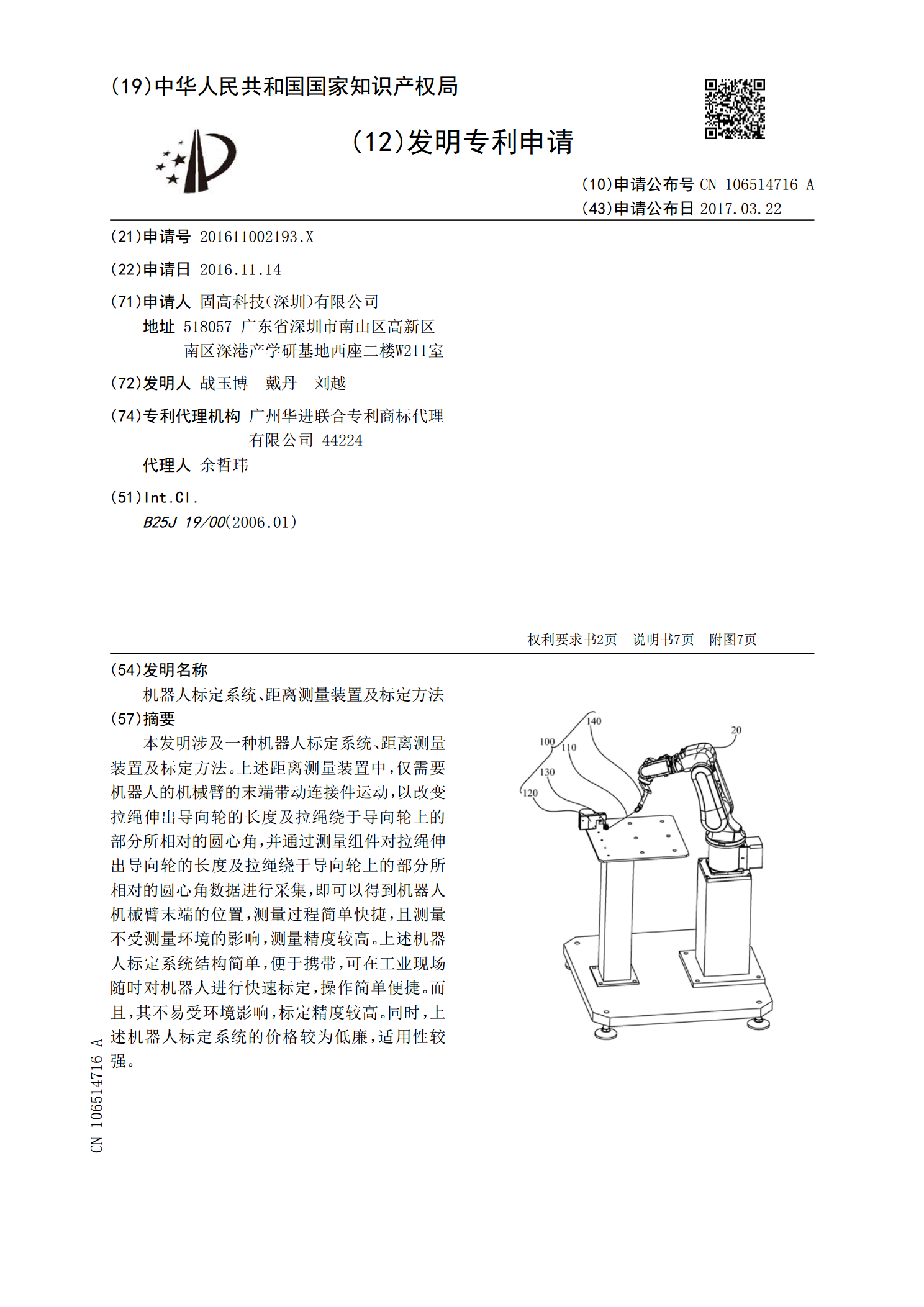
一种扭矩测量系统的标定装置及标定方法.pdf
本发明涉及扭矩标定技术领域,公开一种扭矩测量系统的标定装置及标定方法。扭矩测量系统的标定装置包括主轴机构以及在其两侧对称设置的标定组件。主轴机构包括主轴,主轴的两端均设置有待标定的扭矩测量系统中的测试件,测试件测量主轴两端的扭矩T

机器人标定方法、装置以及系统.pdf
本发明涉及了一种机器人标定方法、装置以及系统,机器人标定方法包括:在标定杆移动到标定板上第一标定点时,获取第一标定点在机器人坐标系下的第一坐标,并且获取标定部相对于机器人坐标系的旋转角度;标定板上各标定点分别沿横向方向和纵向方向排列,横向方向垂直于纵向方向;旋转角度为固定在标定杆上的支杆从第一标定点沿横向方向或纵向方向指向任一标定点时相对于机器人坐标系下的横轴或纵轴的角度;根据第一坐标、各标定点之间的间距、位置关系以及旋转角度,得到其他标定点在机器人坐标系下的第二坐标。本发明简化了机器人标定点的操作过程,
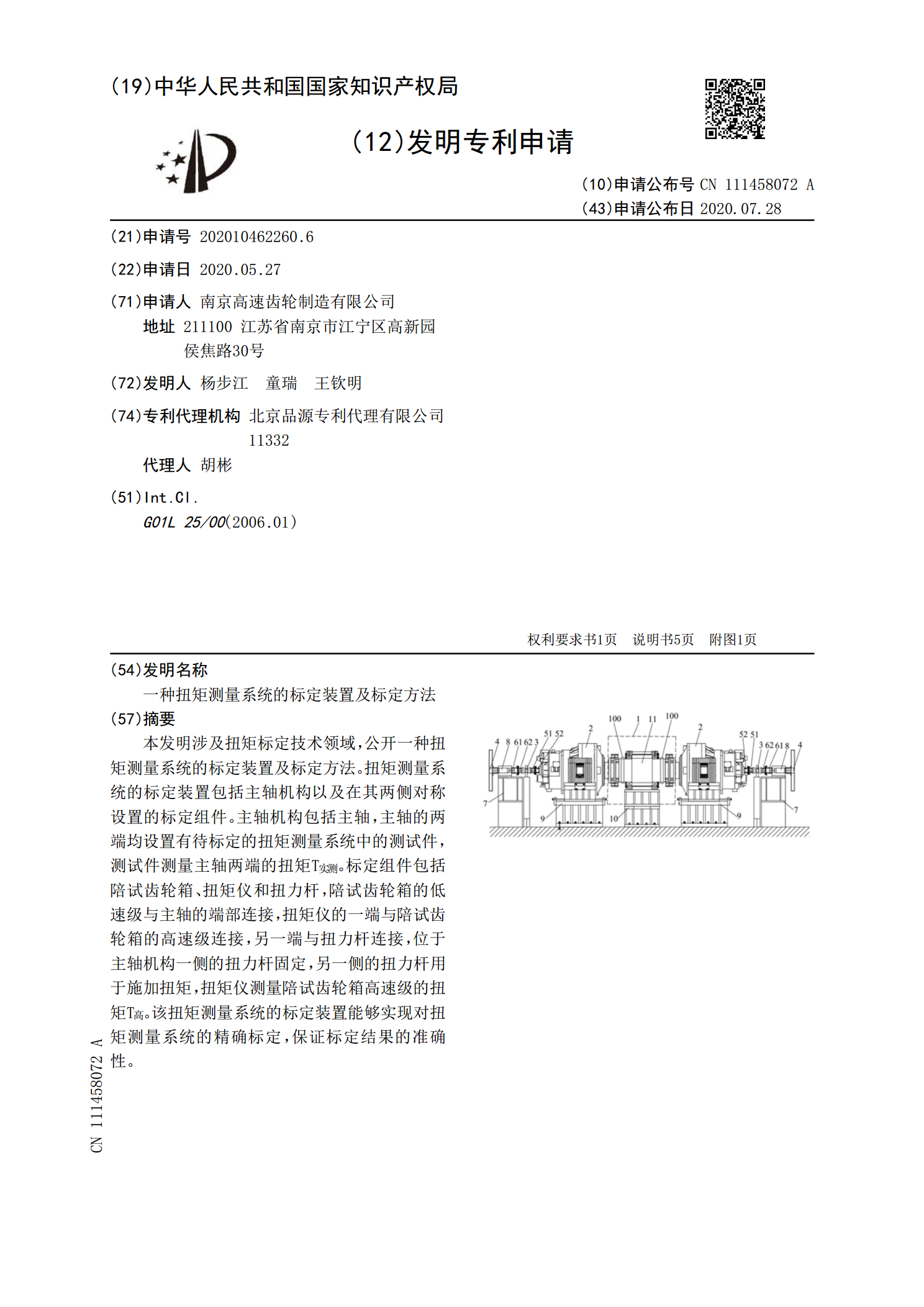
一种标定方法、标定装置及标定系统.pdf
本发明公开了一种标定方法、标定装置及标定系统,用于对视觉检测系统进行位置标定,所述标定装置包括激光模组,点亮激光模组,光束透过菲涅耳透镜在成像板上成像,控制工业相机完成第一次拍照,旋转一个角度,控制工业相机完成第二次拍照;计算两次拍照的激光成像点的像素坐标,从而计算出角度与像素之间的关系,本发明解决了视觉检测系统安装距离误差、透镜焦距误差而引起的位置计算误差,通过使用一台标定系统对多台视觉检测系统进行位置标定,能保证每台视觉检测系统的检测一致性及测量精度。

机器人关节角度测量装置的设计及标定方法.docx
机器人关节角度测量装置的设计及标定方法标题:机器人关节角度测量装置的设计及标定方法摘要:随着机器人技术的快速发展,对于机器人关节角度的精准测量日益成为研究的热点之一。本文针对机器人关节角度测量装置的设计与标定方法展开研究,提出了一种基于传感器的角度测量方案,并给出了详细的标定流程和方法。使用这种装置可以实现对机器人关节角度的高精度测量,为机器人的运动控制提供了重要的数据支持。关键词:机器人;关节角度测量;装置设计;标定方法;传感器1.引言机器人的关节角度测量是机器人运动控制中的重要环节,对于机器人操作的精