
机器人标定方法、装置以及系统.pdf

猫巷****晓容


1/10

2/10
3/10
4/10
5/10
6/10
7/10

8/10

9/10

10/10
亲,该文档总共20页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

机器人标定方法、装置以及系统.pdf
本发明涉及了一种机器人标定方法、装置以及系统,机器人标定方法包括:在标定杆移动到标定板上第一标定点时,获取第一标定点在机器人坐标系下的第一坐标,并且获取标定部相对于机器人坐标系的旋转角度;标定板上各标定点分别沿横向方向和纵向方向排列,横向方向垂直于纵向方向;旋转角度为固定在标定杆上的支杆从第一标定点沿横向方向或纵向方向指向任一标定点时相对于机器人坐标系下的横轴或纵轴的角度;根据第一坐标、各标定点之间的间距、位置关系以及旋转角度,得到其他标定点在机器人坐标系下的第二坐标。本发明简化了机器人标定点的操作过程,
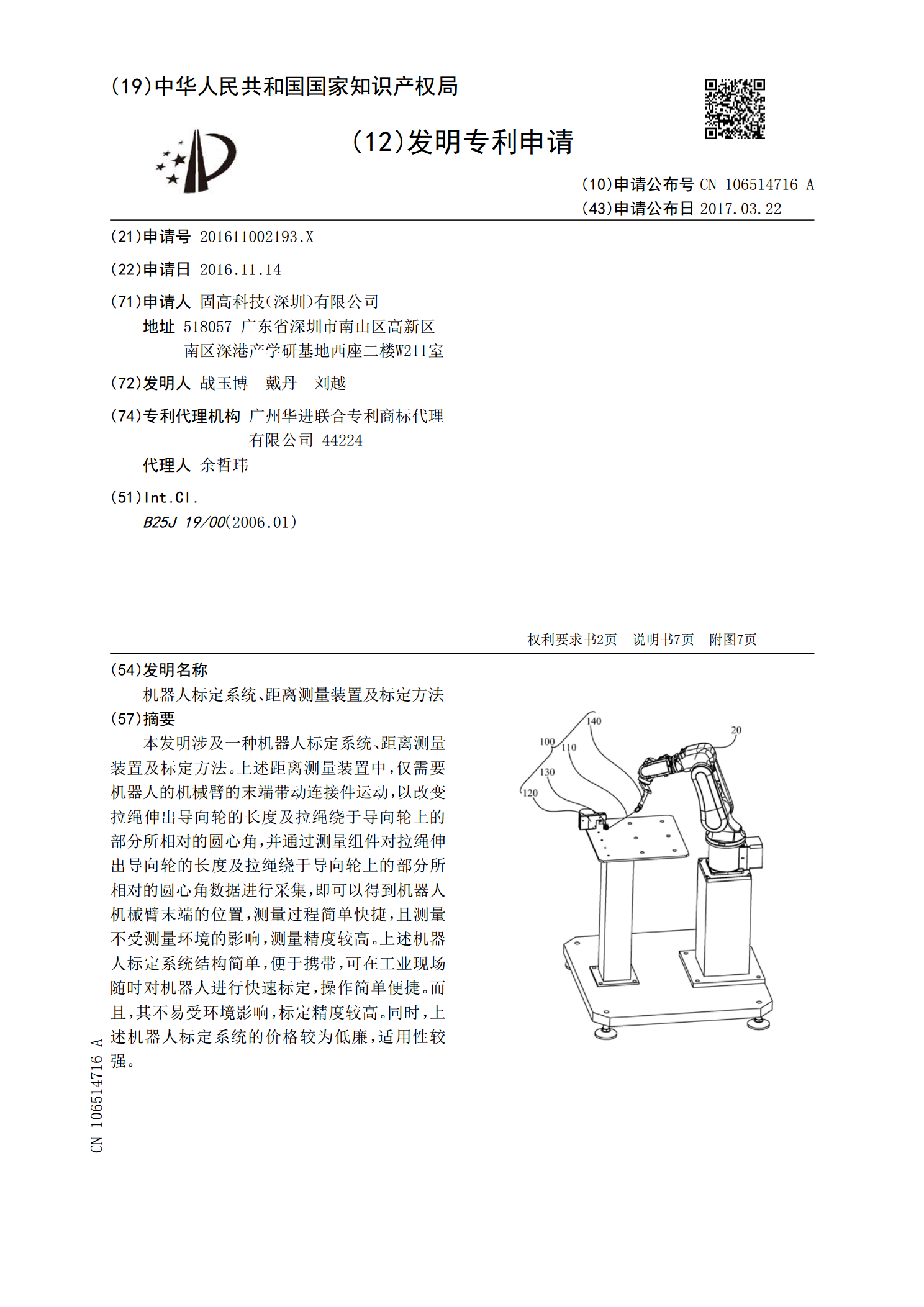
机器人标定系统、距离测量装置及标定方法.pdf
本发明涉及一种机器人标定系统、距离测量装置及标定方法。上述距离测量装置中,仅需要机器人的机械臂的末端带动连接件运动,以改变拉绳伸出导向轮的长度及拉绳绕于导向轮上的部分所相对的圆心角,并通过测量组件对拉绳伸出导向轮的长度及拉绳绕于导向轮上的部分所相对的圆心角数据进行采集,即可以得到机器人机械臂末端的位置,测量过程简单快捷,且测量不受测量环境的影响,测量精度较高。上述机器人标定系统结构简单,便于携带,可在工业现场随时对机器人进行快速标定,操作简单便捷。而且,其不易受环境影响,标定精度较高。同时,上述机器人标定
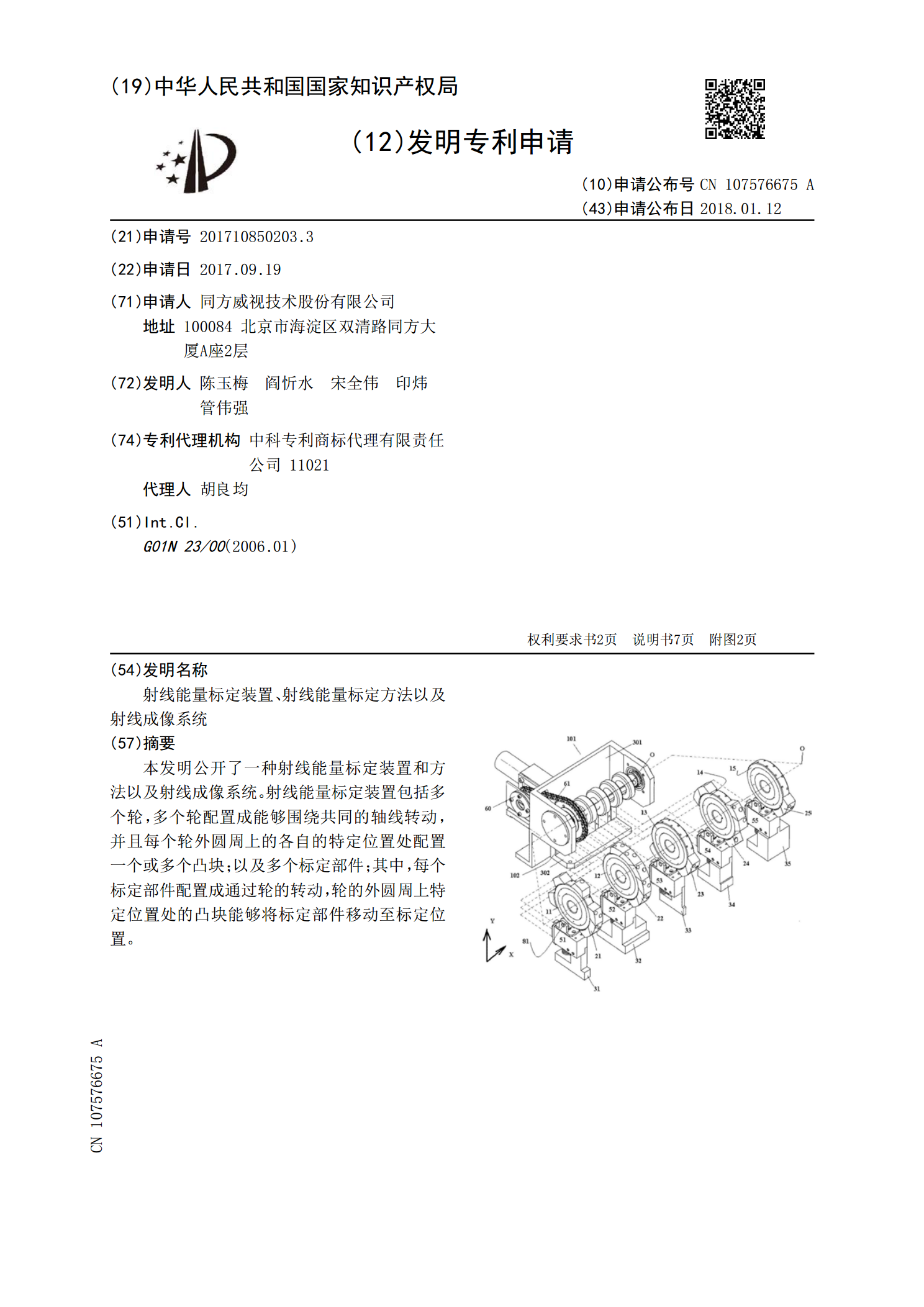
射线能量标定装置、射线能量标定方法以及射线成像系统.pdf
本发明公开了一种射线能量标定装置和方法以及射线成像系统。射线能量标定装置包括多个轮,多个轮配置成能够围绕共同的轴线转动,并且每个轮外圆周上的各自的特定位置处配置一个或多个凸块;以及多个标定部件;其中,每个标定部件配置成通过轮的转动,轮的外圆周上特定位置处的凸块能够将标定部件移动至标定位置。
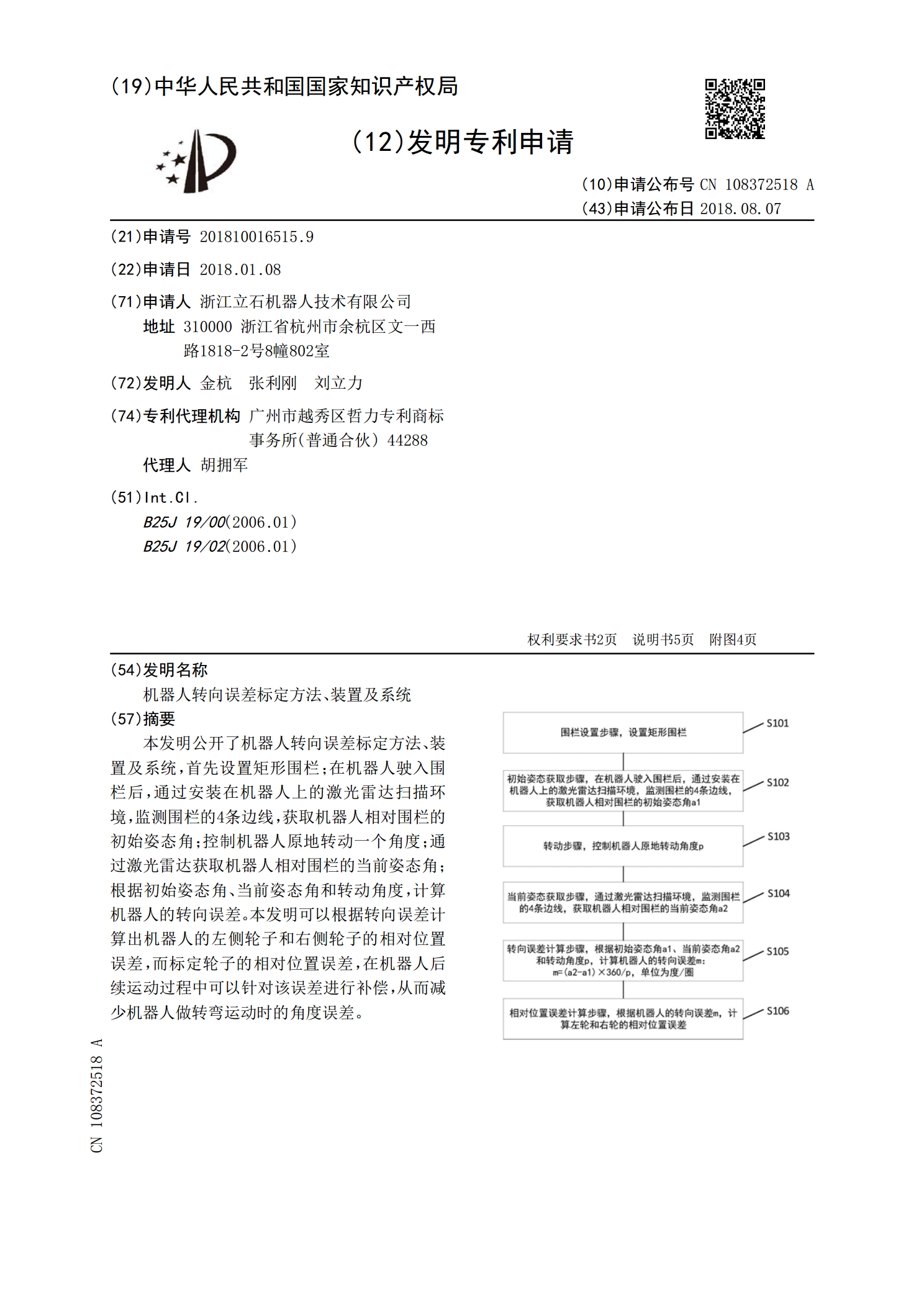
机器人转向误差标定方法、装置及系统.pdf
本发明公开了机器人转向误差标定方法、装置及系统,首先设置矩形围栏;在机器人驶入围栏后,通过安装在机器人上的激光雷达扫描环境,监测围栏的4条边线,获取机器人相对围栏的初始姿态角;控制机器人原地转动一个角度;通过激光雷达获取机器人相对围栏的当前姿态角;根据初始姿态角、当前姿态角和转动角度,计算机器人的转向误差。本发明可以根据转向误差计算出机器人的左侧轮子和右侧轮子的相对位置误差,而标定轮子的相对位置误差,在机器人后续运动过程中可以针对该误差进行补偿,从而减少机器人做转弯运动时的角度误差。
机器人、零点标定夹具、零点标定系统以及零点标定方法.pdf
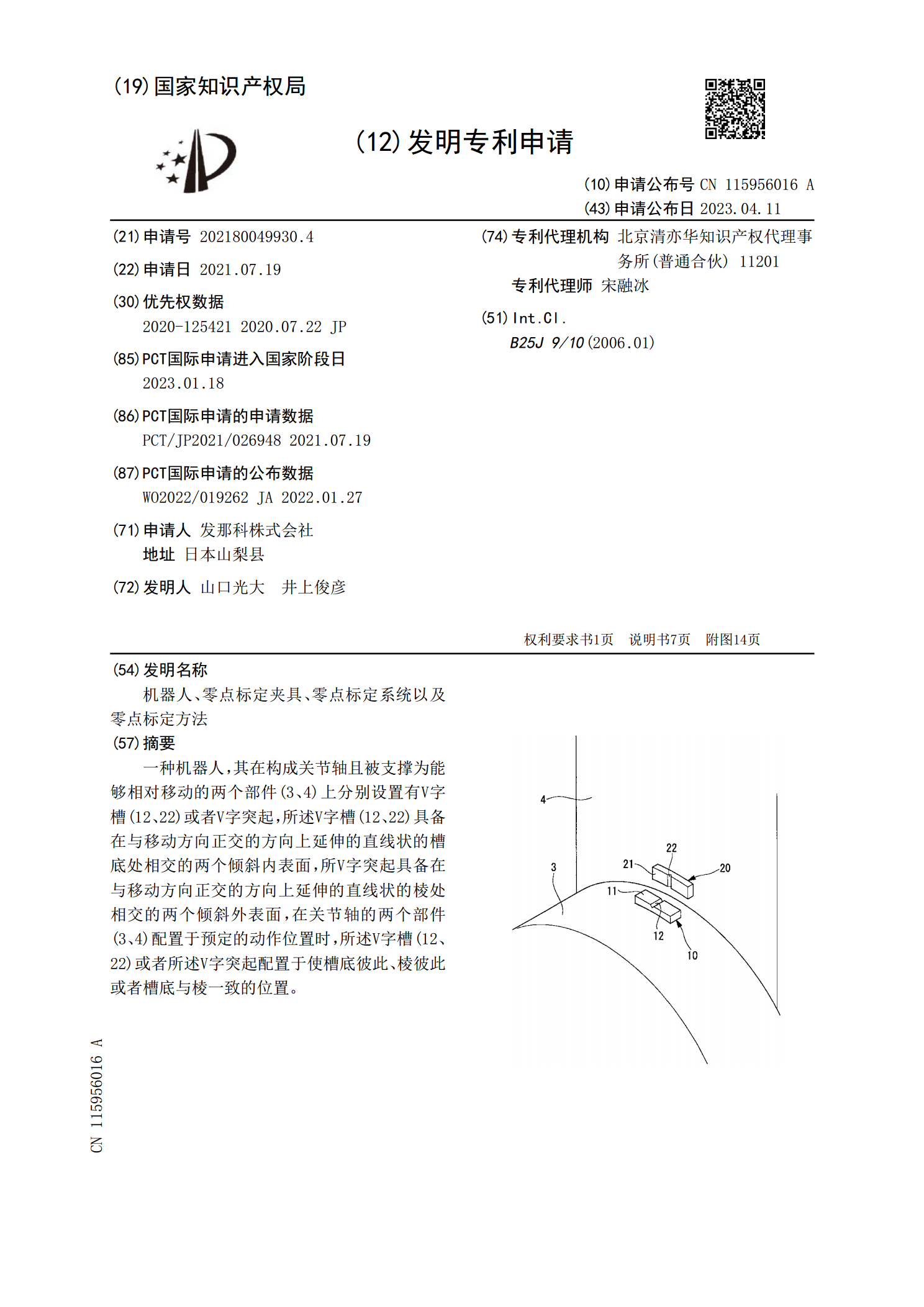
一种机器人,其在构成关节轴且被支撑为能够相对移动的两个部件(3、4)上分别设置有V字槽(12、22)或者V字突起,所述V字槽(12、22)具备在与移动方向正交的方向上延伸的直线状的槽底处相交的两个倾斜内表面,所V字突起具备在与移动方向正交的方向上延伸的直线状的棱处相交的两个倾斜外表面,在关节轴的两个部件(3、4)配置于预定的动作位置时,所述V字槽(12、22)或者所述V字突起配置于使槽底彼此、棱彼此或者槽底与棱一致的位置。