
一种扭矩测量系统的标定装置及标定方法.pdf

明钰****甜甜

1/8

2/8

3/8

4/8

5/8

6/8

7/8
8/8
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种扭矩测量系统的标定装置及标定方法.pdf
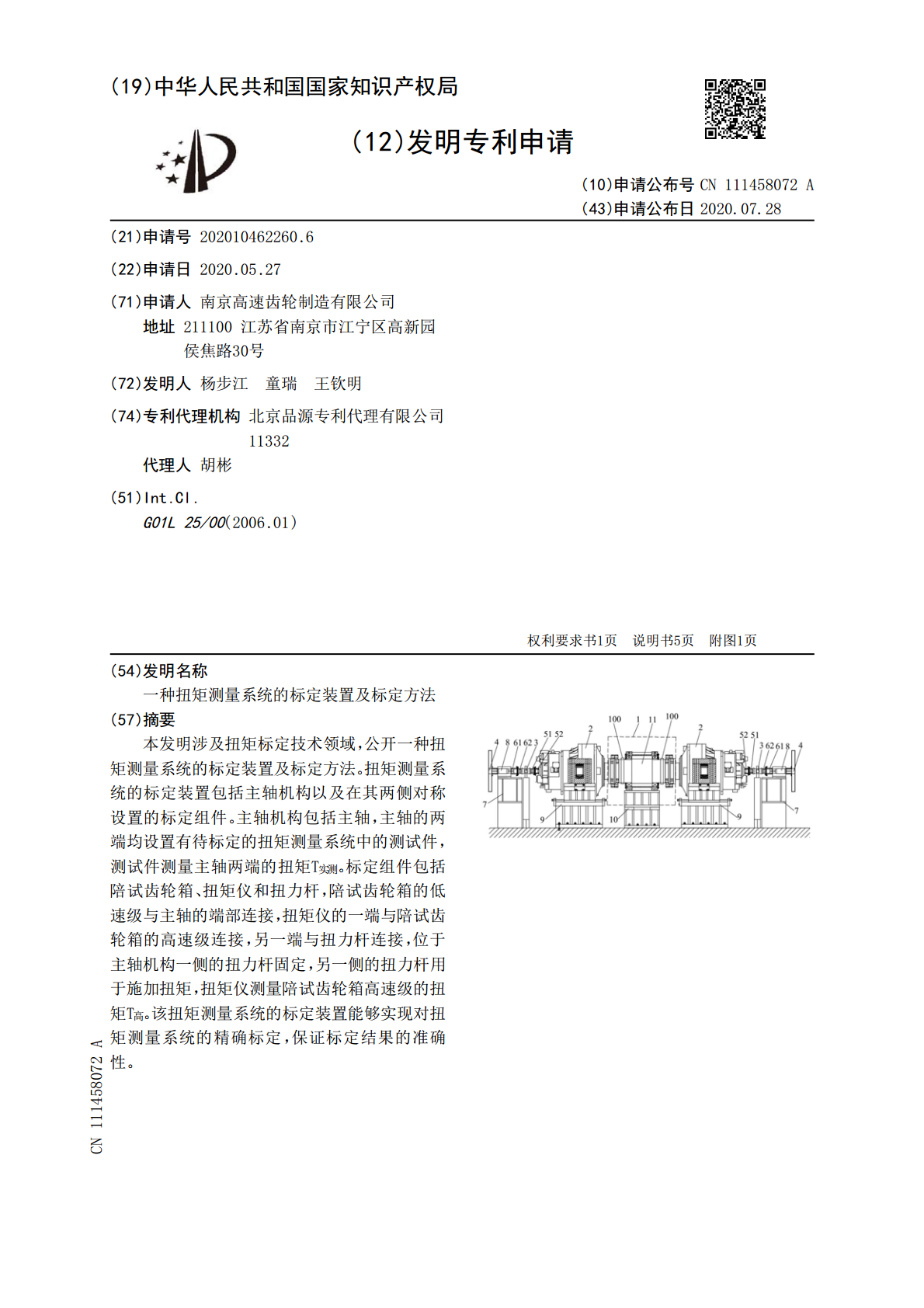
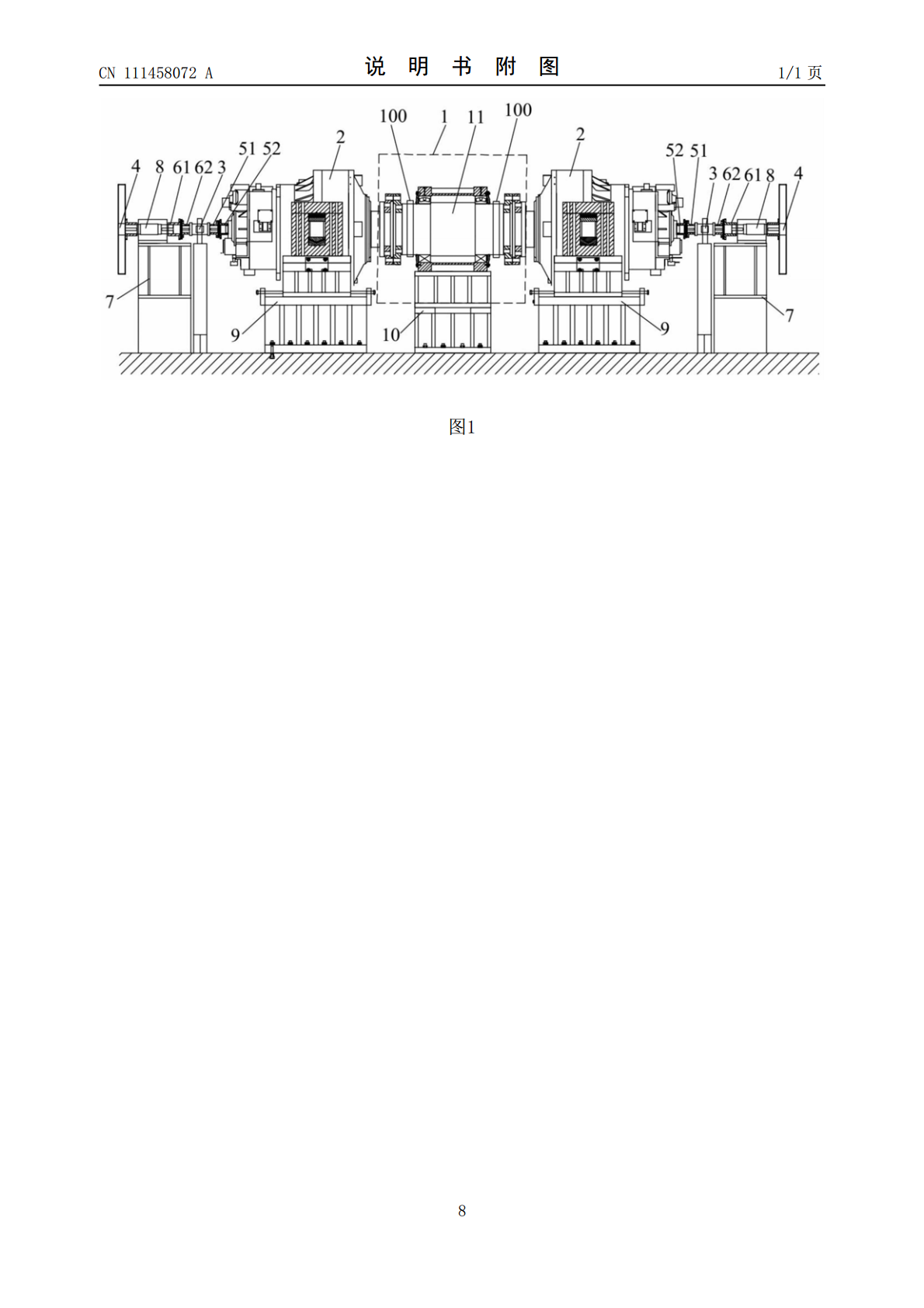
本发明涉及扭矩标定技术领域,公开一种扭矩测量系统的标定装置及标定方法。扭矩测量系统的标定装置包括主轴机构以及在其两侧对称设置的标定组件。主轴机构包括主轴,主轴的两端均设置有待标定的扭矩测量系统中的测试件,测试件测量主轴两端的扭矩T

标定车辆需求扭矩的方法及扭矩标定装置.pdf
本发明提供一种标定车辆需求扭矩的方法及扭矩标定装置,用以解决现有技术标定车辆蠕行功能需求扭矩难度大的问题。该方法包括:确定所述车辆在以目标速度行驶的平衡扭矩,所述平衡扭矩是在以目标速度行驶时为了克服摩擦需要提供的扭矩;确定所述车辆起步时的临界加速度;根据所述临界加速度以及所述目标速度,标定所述车辆在蠕行状态下,从起步达到所述目标速度的过程中需求的加速度曲线;根据已标定的加速度、所述车辆的质量和所述平衡扭矩,标定所述车辆在蠕行状态下,从起步达到所述目标速度的过程中的需求扭矩曲线。
一种标定方法、标定装置及标定系统.pdf
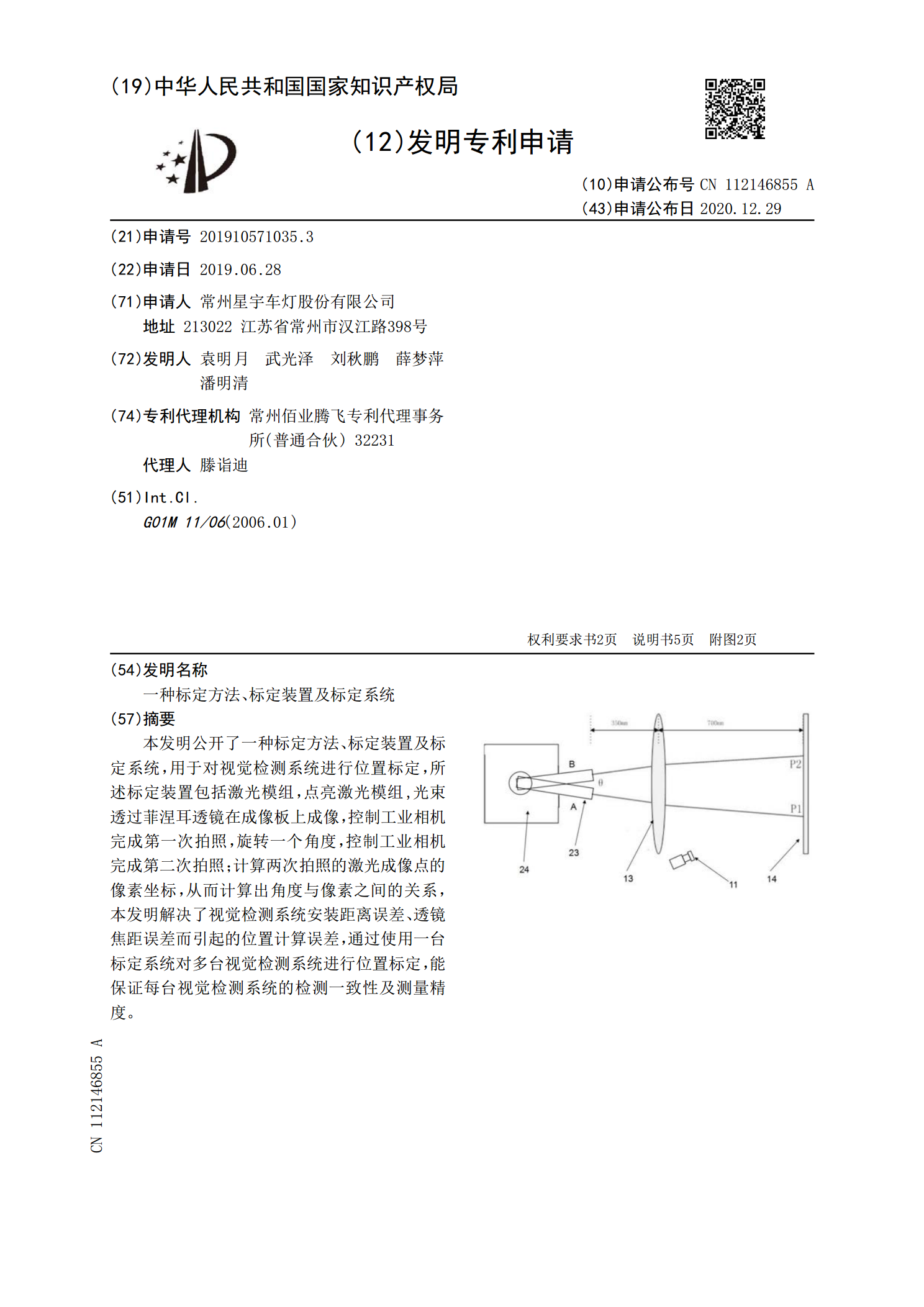
本发明公开了一种标定方法、标定装置及标定系统,用于对视觉检测系统进行位置标定,所述标定装置包括激光模组,点亮激光模组,光束透过菲涅耳透镜在成像板上成像,控制工业相机完成第一次拍照,旋转一个角度,控制工业相机完成第二次拍照;计算两次拍照的激光成像点的像素坐标,从而计算出角度与像素之间的关系,本发明解决了视觉检测系统安装距离误差、透镜焦距误差而引起的位置计算误差,通过使用一台标定系统对多台视觉检测系统进行位置标定,能保证每台视觉检测系统的检测一致性及测量精度。
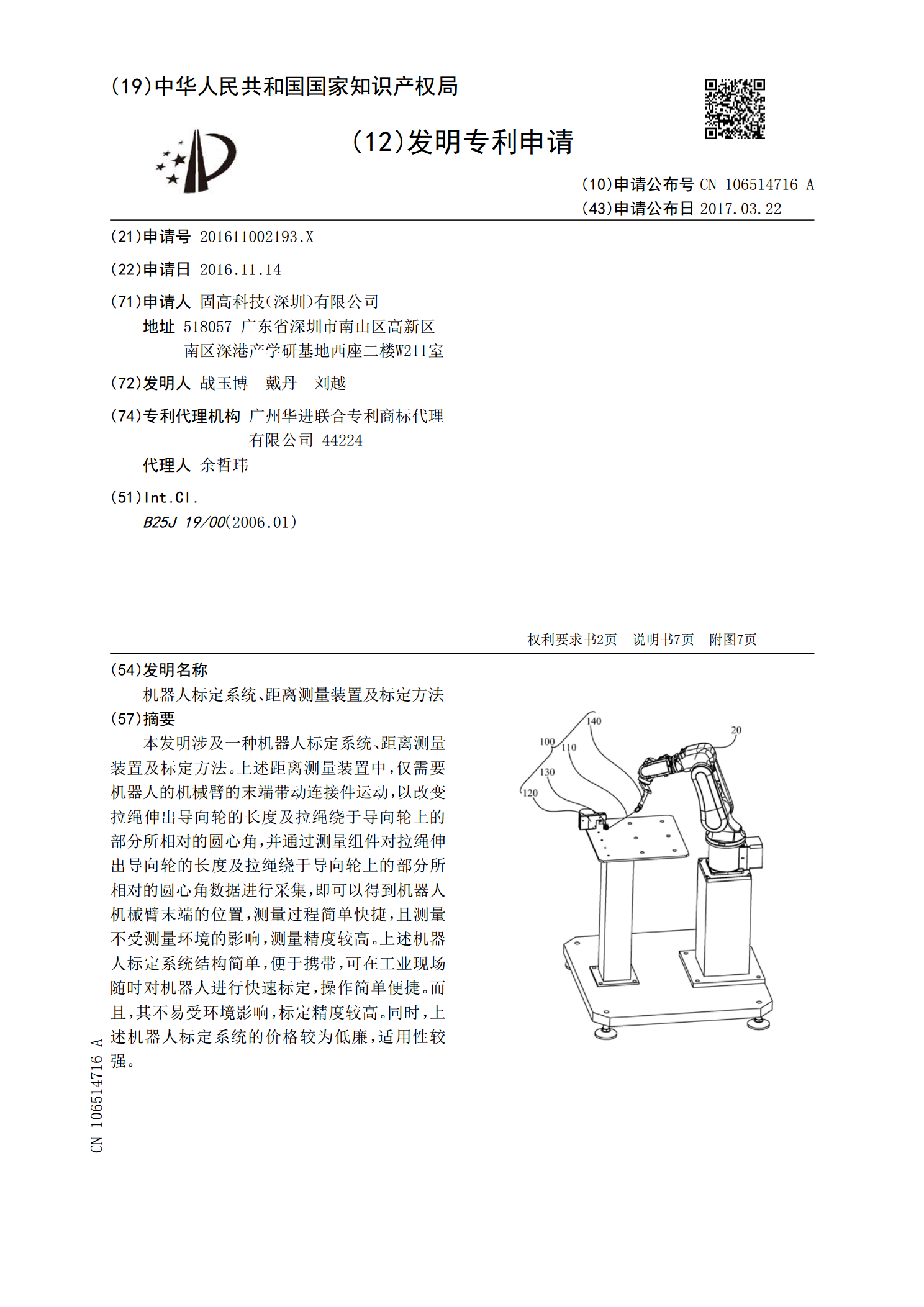
机器人标定系统、距离测量装置及标定方法.pdf
本发明涉及一种机器人标定系统、距离测量装置及标定方法。上述距离测量装置中,仅需要机器人的机械臂的末端带动连接件运动,以改变拉绳伸出导向轮的长度及拉绳绕于导向轮上的部分所相对的圆心角,并通过测量组件对拉绳伸出导向轮的长度及拉绳绕于导向轮上的部分所相对的圆心角数据进行采集,即可以得到机器人机械臂末端的位置,测量过程简单快捷,且测量不受测量环境的影响,测量精度较高。上述机器人标定系统结构简单,便于携带,可在工业现场随时对机器人进行快速标定,操作简单便捷。而且,其不易受环境影响,标定精度较高。同时,上述机器人标定

一种大尺寸测量梁标定装置及标定方法.pdf
本发明涉及一种大尺寸测量梁标定装置及标定方法,包括夹紧固定装置,夹紧固定装置的侧面与固定基础连接,夹紧固定装置包括分别与固定基础连接的下固定板和上压紧结构,下固定板的上表面放置测量梁,上压紧结构与测量梁的上部配合将测量梁固定,夹紧固定装置一侧的测量梁上配合安装有框架结构,框架结构用于连接加载重物;还包括与加载重物配合的滑轮结构。通过设置下固定板和上压紧结构配合的夹紧固定装置实现多种规格测量梁的装夹,连接加载重物的框架结构与滑轮结构组合实现在不拆载荷加载工装的情况下进行测量梁的弯矩、剪力和扭矩系数标定,同时