
机器人关节角度测量装置的设计及标定方法.docx

快乐****蜜蜂


1/3

2/3

3/3
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

机器人关节角度测量装置的设计及标定方法.docx
机器人关节角度测量装置的设计及标定方法标题:机器人关节角度测量装置的设计及标定方法摘要:随着机器人技术的快速发展,对于机器人关节角度的精准测量日益成为研究的热点之一。本文针对机器人关节角度测量装置的设计与标定方法展开研究,提出了一种基于传感器的角度测量方案,并给出了详细的标定流程和方法。使用这种装置可以实现对机器人关节角度的高精度测量,为机器人的运动控制提供了重要的数据支持。关键词:机器人;关节角度测量;装置设计;标定方法;传感器1.引言机器人的关节角度测量是机器人运动控制中的重要环节,对于机器人操作的精
机器人标定系统、距离测量装置及标定方法.pdf
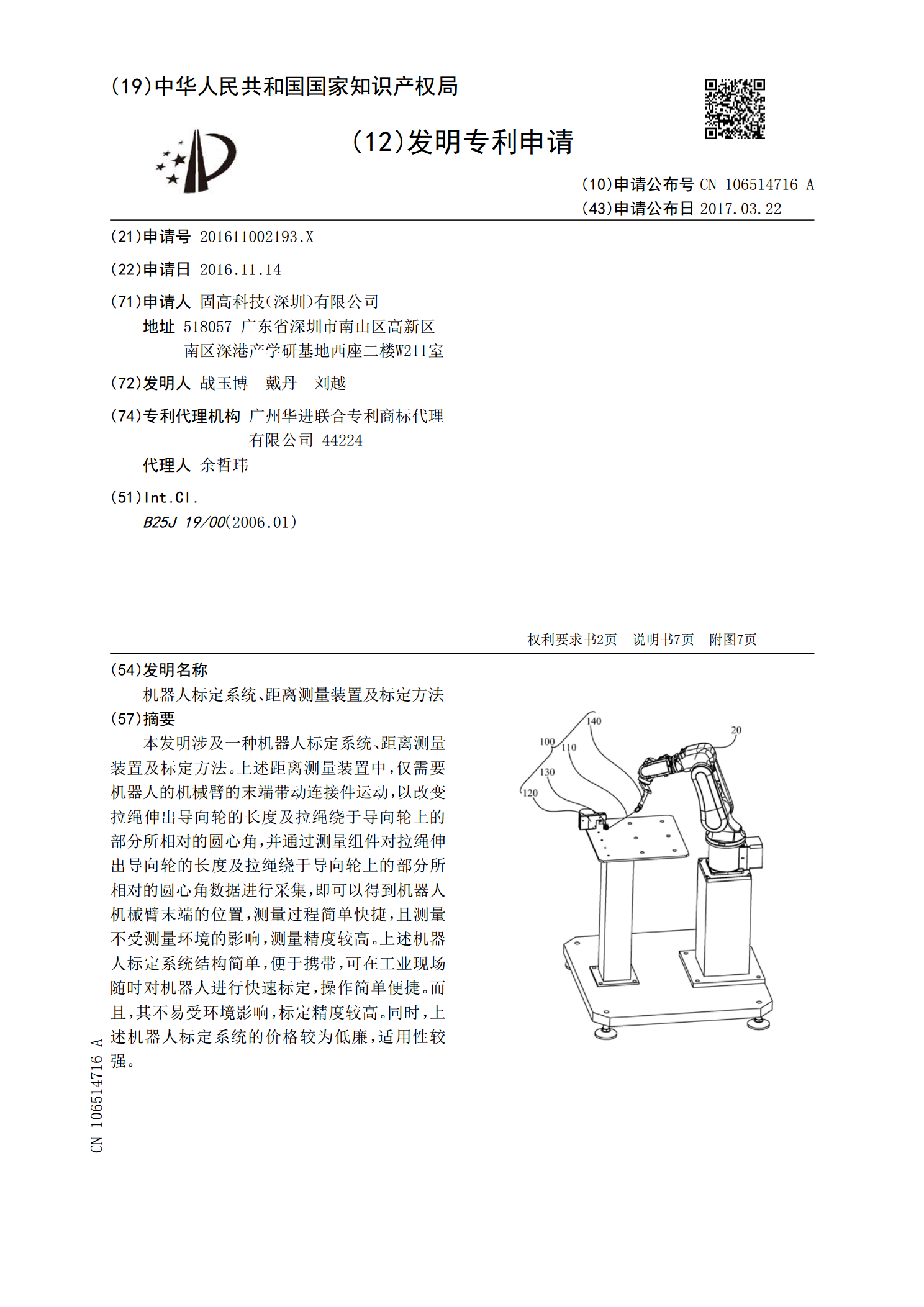
本发明涉及一种机器人标定系统、距离测量装置及标定方法。上述距离测量装置中,仅需要机器人的机械臂的末端带动连接件运动,以改变拉绳伸出导向轮的长度及拉绳绕于导向轮上的部分所相对的圆心角,并通过测量组件对拉绳伸出导向轮的长度及拉绳绕于导向轮上的部分所相对的圆心角数据进行采集,即可以得到机器人机械臂末端的位置,测量过程简单快捷,且测量不受测量环境的影响,测量精度较高。上述机器人标定系统结构简单,便于携带,可在工业现场随时对机器人进行快速标定,操作简单便捷。而且,其不易受环境影响,标定精度较高。同时,上述机器人标定
髋关节假体的角度测量方法、装置和测量系统.pdf
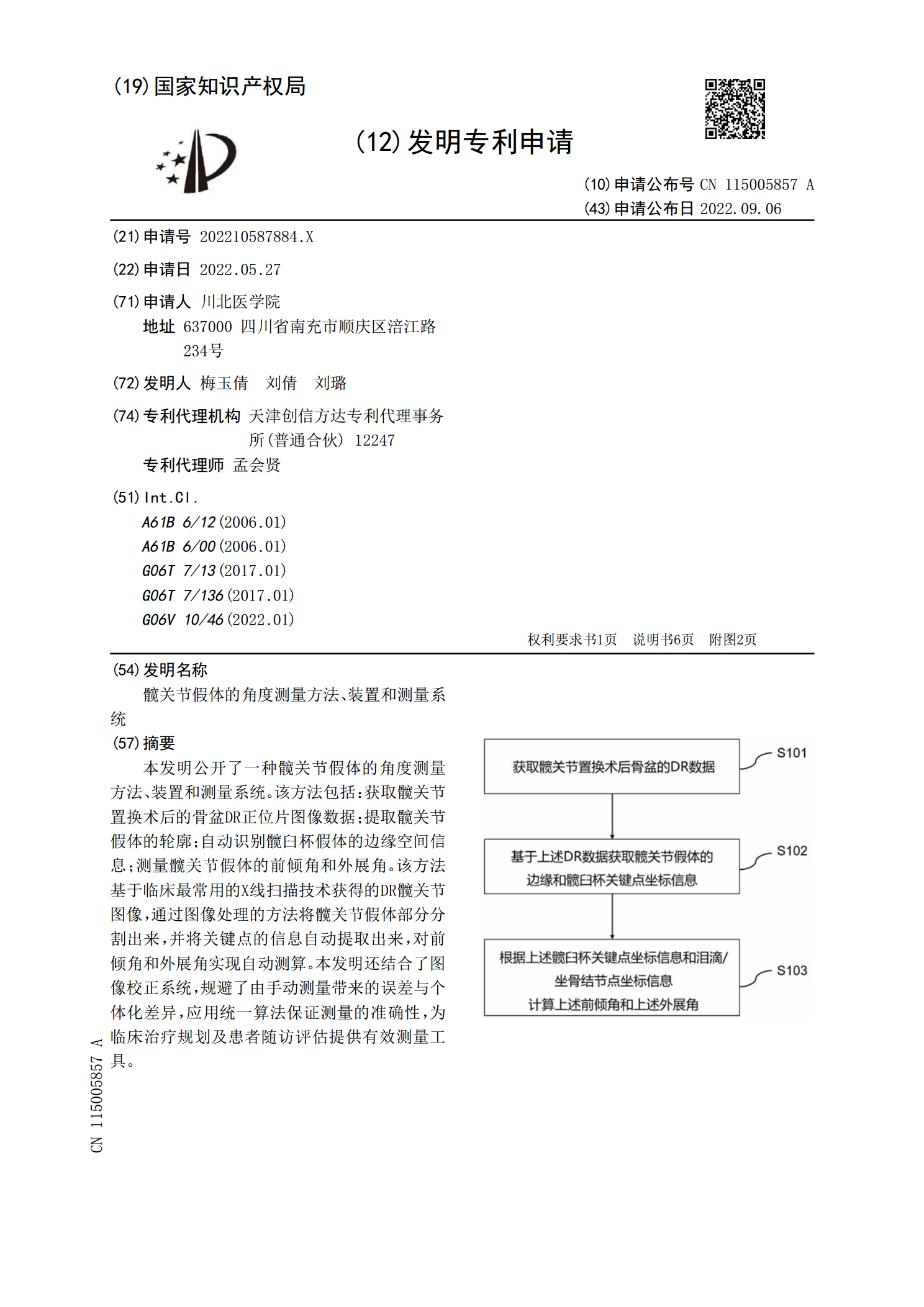
本发明公开了一种髋关节假体的角度测量方法、装置和测量系统。该方法包括:获取髋关节置换术后的骨盆DR正位片图像数据;提取髋关节假体的轮廓;自动识别髋臼杯假体的边缘空间信息;测量髋关节假体的前倾角和外展角。该方法基于临床最常用的X线扫描技术获得的DR髋关节图像,通过图像处理的方法将髋关节假体部分分割出来,并将关键点的信息自动提取出来,对前倾角和外展角实现自动测算。本发明还结合了图像校正系统,规避了由手动测量带来的误差与个体化差异,应用统一算法保证测量的准确性,为临床治疗规划及患者随访评估提供有效测量工具。
三维关节角度测量装置.pdf
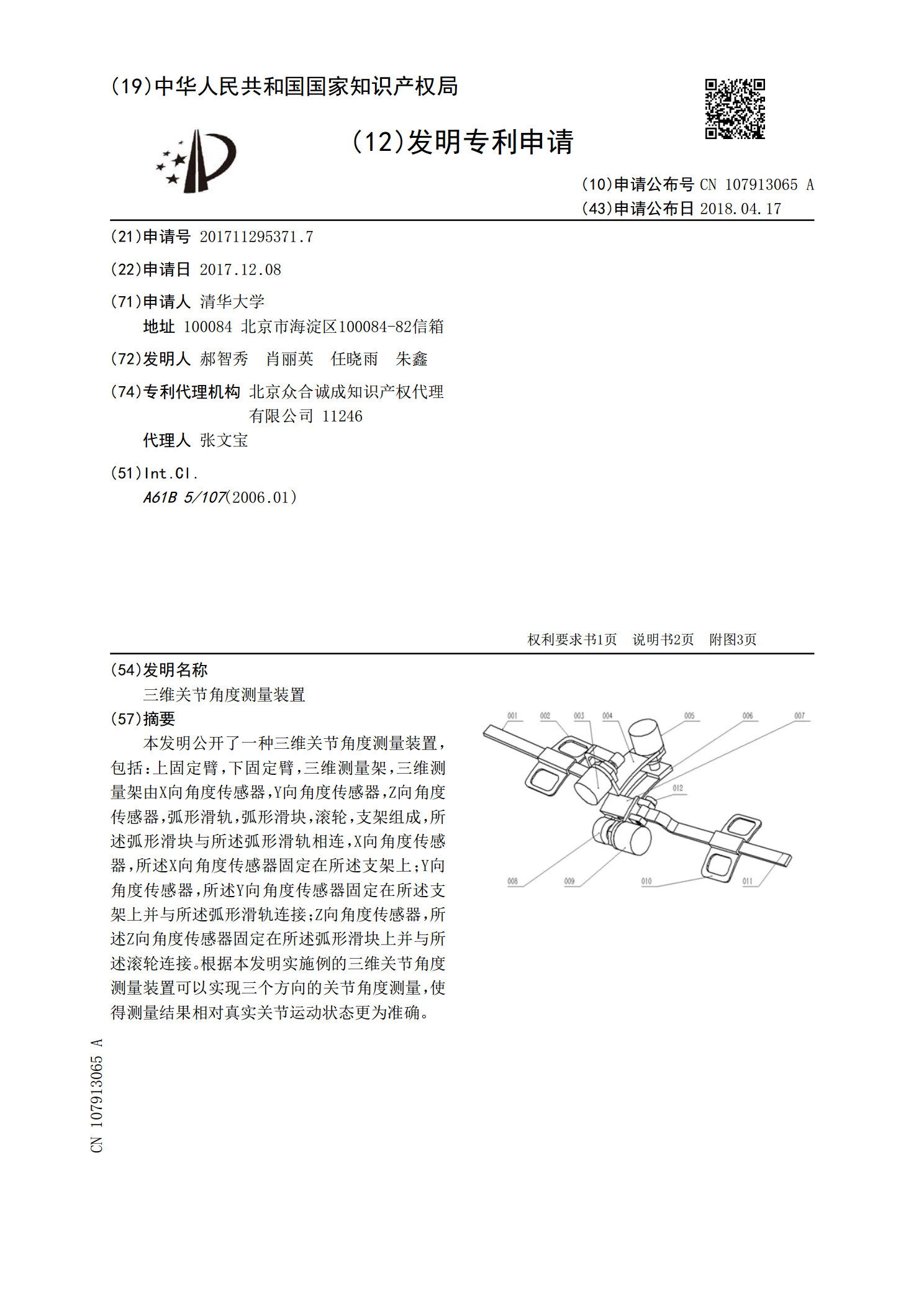
本发明公开了一种三维关节角度测量装置,包括:上固定臂,下固定臂,三维测量架,三维测量架由X向角度传感器,Y向角度传感器,Z向角度传感器,弧形滑轨,弧形滑块,滚轮,支架组成,所述弧形滑块与所述弧形滑轨相连,X向角度传感器,所述X向角度传感器固定在所述支架上;Y向角度传感器,所述Y向角度传感器固定在所述支架上并与所述弧形滑轨连接;Z向角度传感器,所述Z向角度传感器固定在所述弧形滑块上并与所述滚轮连接。根据本发明实施例的三维关节角度测量装置可以实现三个方向的关节角度测量,使得测量结果相对真实关节运动状态更为准确

用于锚固电子装置并测量关节角度的系统、方法和设备.pdf
一种在用户身上安装装置的系统和方法,可以包括指示件组件,指示件组件包括在用户身上放置标记的标记器,和放在用户身上的粘附垫组件。膝关节枢轴锚可被附接到用户身上。具有近端部的模板可以枢轴式地安装到膝关节枢轴锚上。模板的远端部可以定位在用户身上的不同位置。模板还可以具有孔。一组槽片可以互换地位于模板的孔中。每个槽片可以被固定在用户身上的各个位置。模板和膝关节枢轴锚可以从用户身上移除,而槽片仍留在用户身上,以支撑测角仪。