
一种电动汽车的制动控制方法、制动控制装置和制动系统.pdf

一吃****仪凡

1/8

2/8

3/8
4/8
5/8

6/8
7/8
8/8
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种电动汽车的制动控制方法、制动控制装置和制动系统.pdf
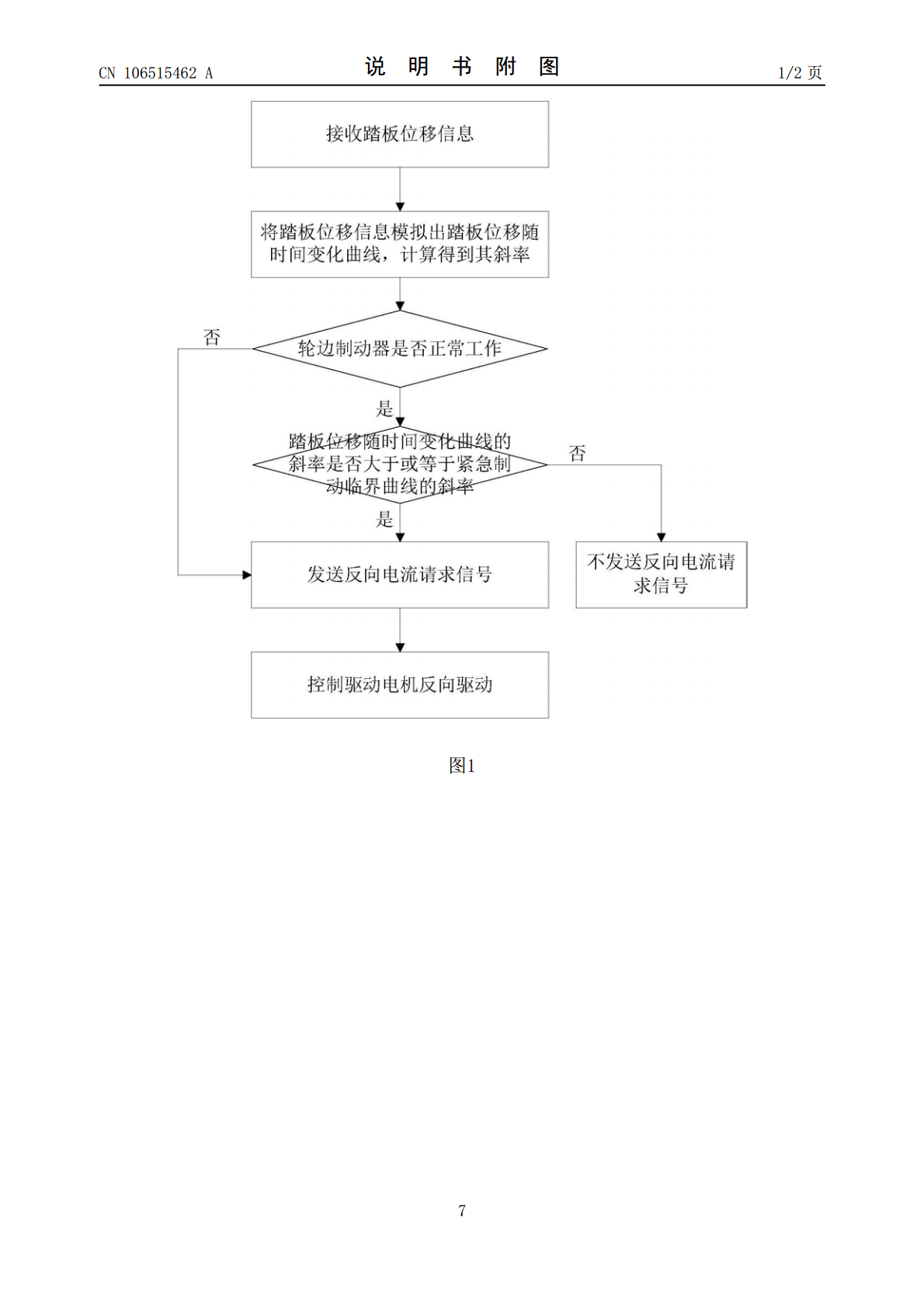
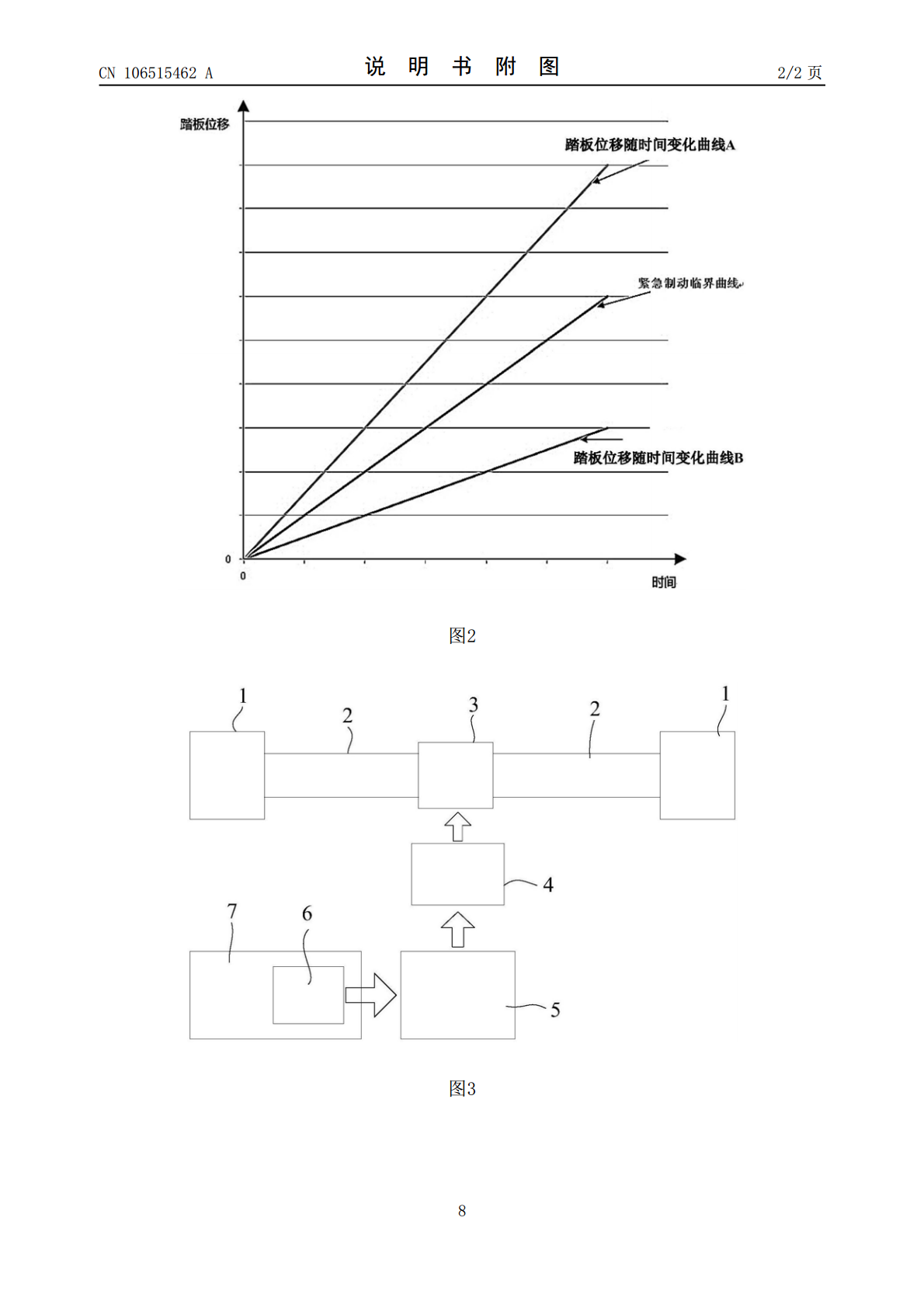
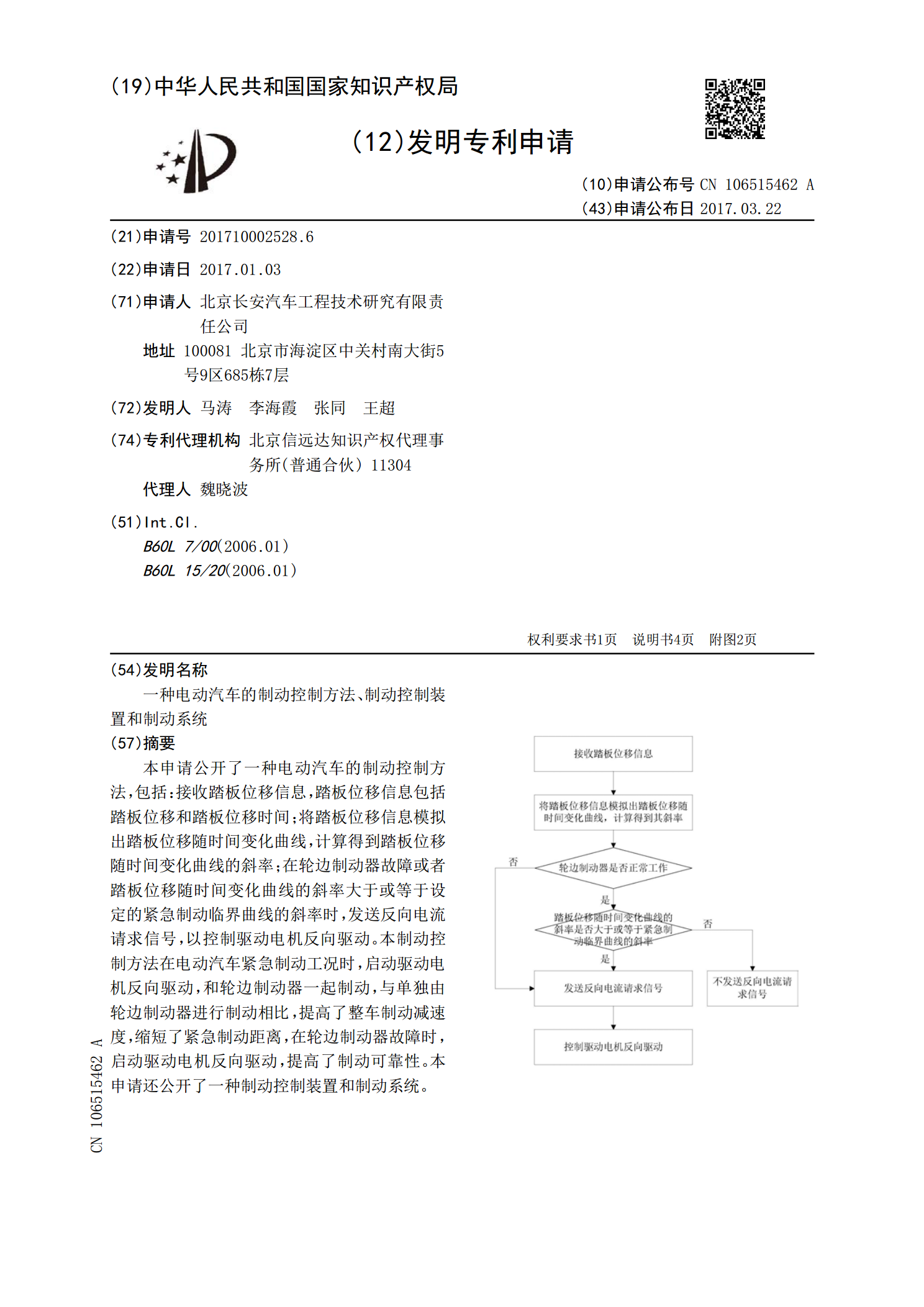
本申请公开了一种电动汽车的制动控制方法,包括:接收踏板位移信息,踏板位移信息包括踏板位移和踏板位移时间;将踏板位移信息模拟出踏板位移随时间变化曲线,计算得到踏板位移随时间变化曲线的斜率;在轮边制动器故障或者踏板位移随时间变化曲线的斜率大于或等于设定的紧急制动临界曲线的斜率时,发送反向电流请求信号,以控制驱动电机反向驱动。本制动控制方法在电动汽车紧急制动工况时,启动驱动电机反向驱动,和轮边制动器一起制动,与单独由轮边制动器进行制动相比,提高了整车制动减速度,缩短了紧急制动距离,在轮边制动器故障时,启动驱动电
制动装置、制动系统以及制动装置的控制方法.pdf
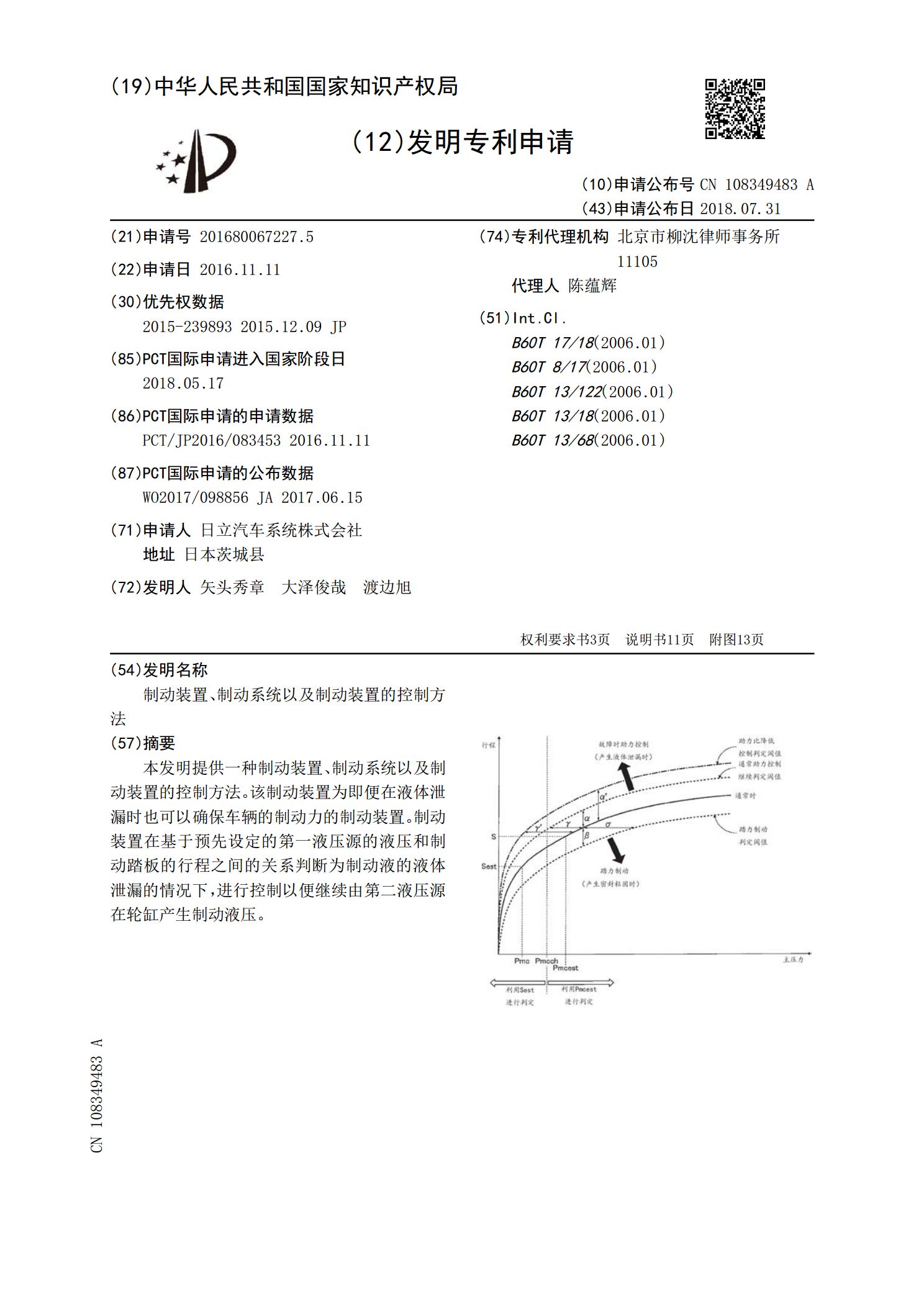
本发明提供一种制动装置、制动系统以及制动装置的控制方法。该制动装置为即便在液体泄漏时也可以确保车辆的制动力的制动装置。制动装置在基于预先设定的第一液压源的液压和制动踏板的行程之间的关系判断为制动液的液体泄漏的情况下,进行控制以便继续由第二液压源在轮缸产生制动液压。

制动系统和制动控制装置.pdf
本发明涉及用于机动车的制动系统,其具有可液压操作的车轮制动器(50,51,52,53)、处于大气压力下的压力介质储备容器(80)和第一电液式制动控制装置(60),该第一电液式制动控制装置包括用于调整车轮各自的制动压力的第一压力调节阀组件(62)、可电控制的第一压力源(63)并且对于每个车轮制动器都包括车轮各自的输出压力连接端(20,21,22,23),其中,设置有第二电液式制动控制装置(70),该第二电液式制动控制装置包括第二压力调节阀组件(3,6,7,16)、可电控制的第二压力源(1)和容器连接端(81
一种电动汽车的制动控制方法、制动控制系统及汽车.pdf
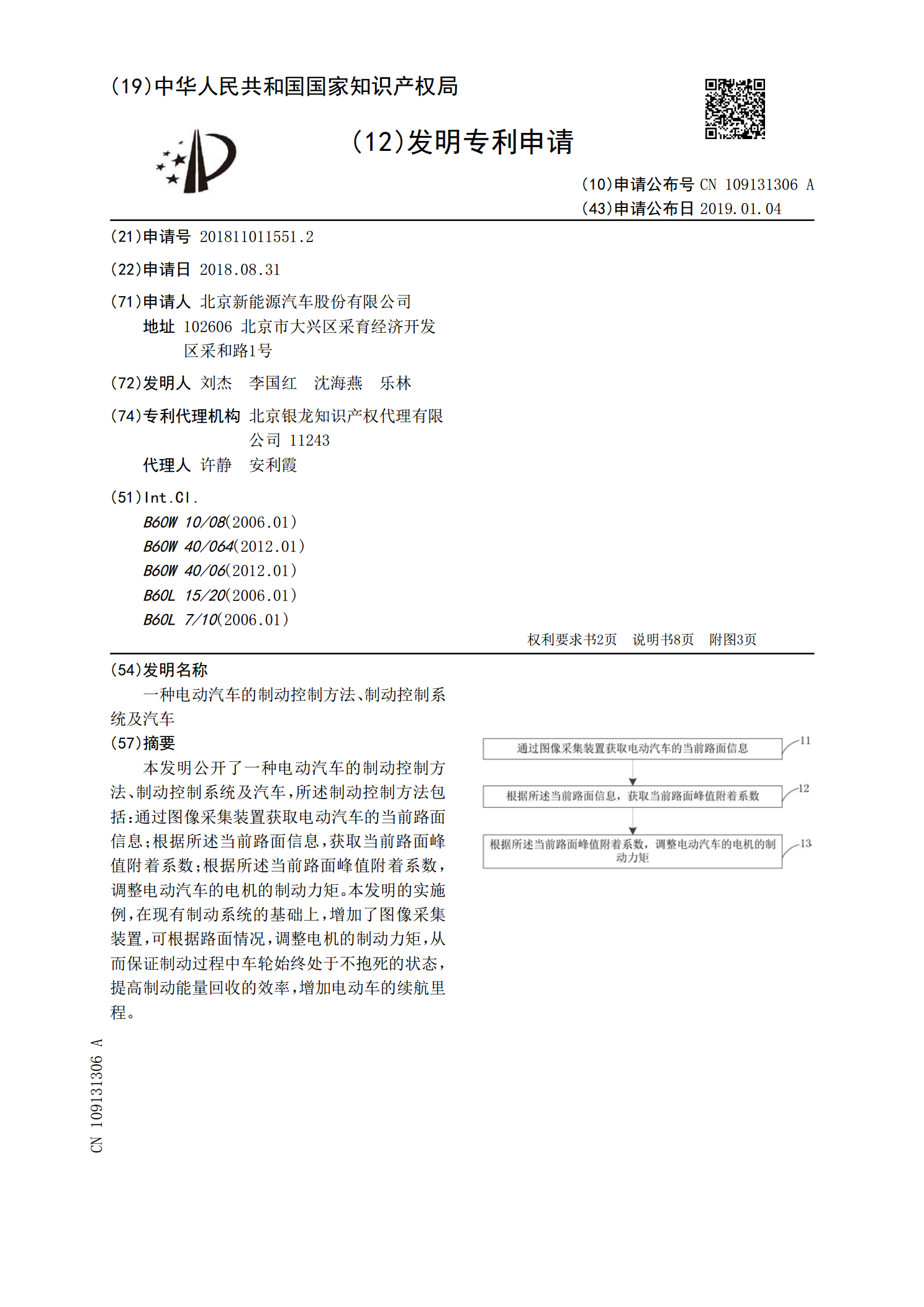
本发明公开了一种电动汽车的制动控制方法、制动控制系统及汽车,所述制动控制方法包括:通过图像采集装置获取电动汽车的当前路面信息;根据所述当前路面信息,获取当前路面峰值附着系数;根据所述当前路面峰值附着系数,调整电动汽车的电机的制动力矩。本发明的实施例,在现有制动系统的基础上,增加了图像采集装置,可根据路面情况,调整电机的制动力矩,从而保证制动过程中车轮始终处于不抱死的状态,提高制动能量回收的效率,增加电动车的续航里程。

制动控制器、制动控制系统和制动控制方法.pdf
制动控制器(20)减小通过打开或关闭配置在液压回路中的减压线性控制阀(67)、调节器截止阀(65)和主截止阀(64)来减小作用到轮缸(23)的液压压力。制动ECU(70)检测车辆的状态,基于所检测到的车辆状态,来评估由于轮缸压力的减小而产生的所述噪声对车辆的影响程度,并且之后基于评估结果来从电磁阀中,即减压线性控制阀(67)、调节器截止阀(65)和主截止阀(64)中进行选择以降低轮缸压力。