
带有轮径校正功能的双轮差动底盘控制装置及其控制方法.pdf

Ch****75

1/8

2/8
3/8

4/8

5/8
6/8
7/8
8/8
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
带有轮径校正功能的双轮差动底盘控制装置及其控制方法.pdf
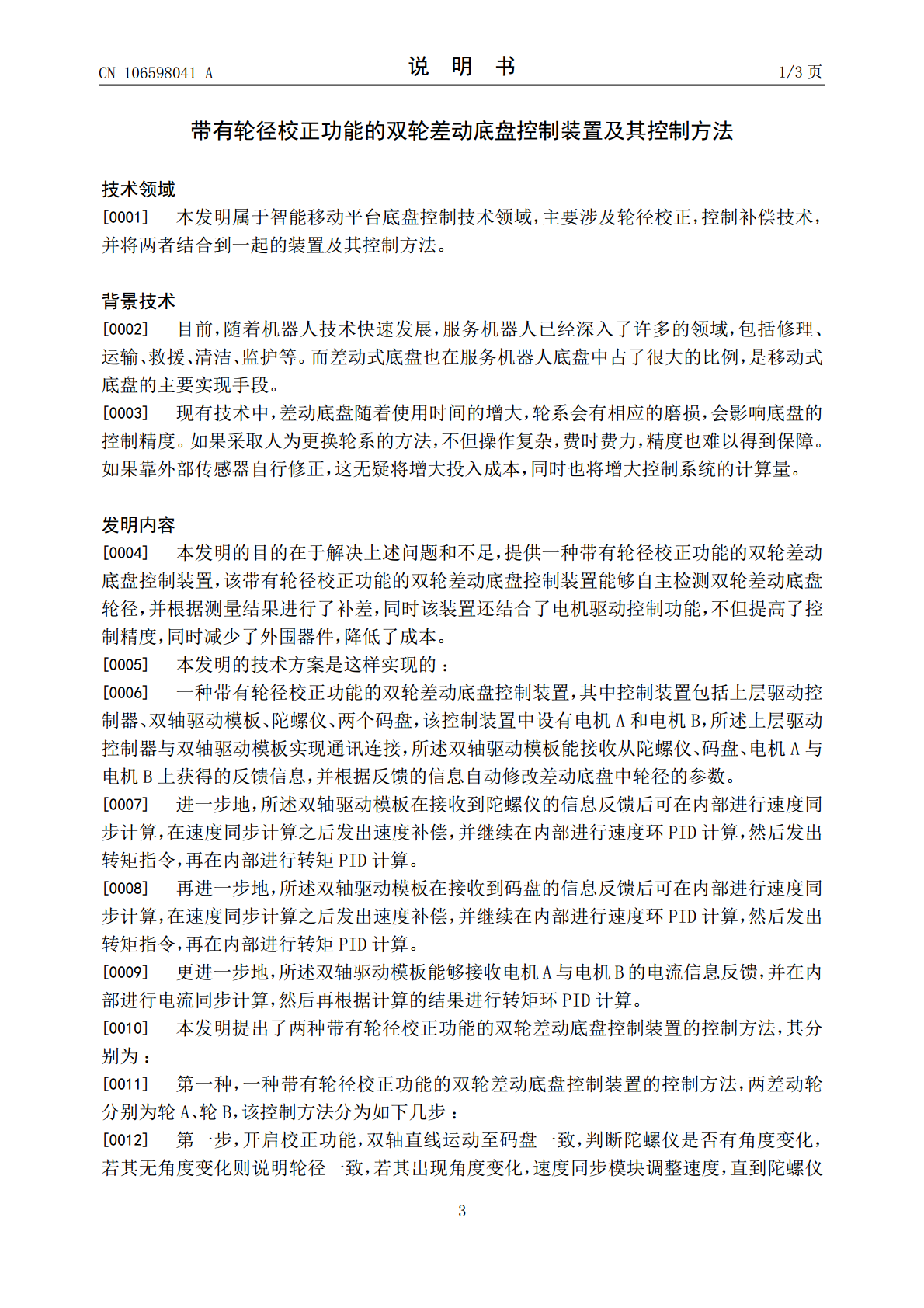
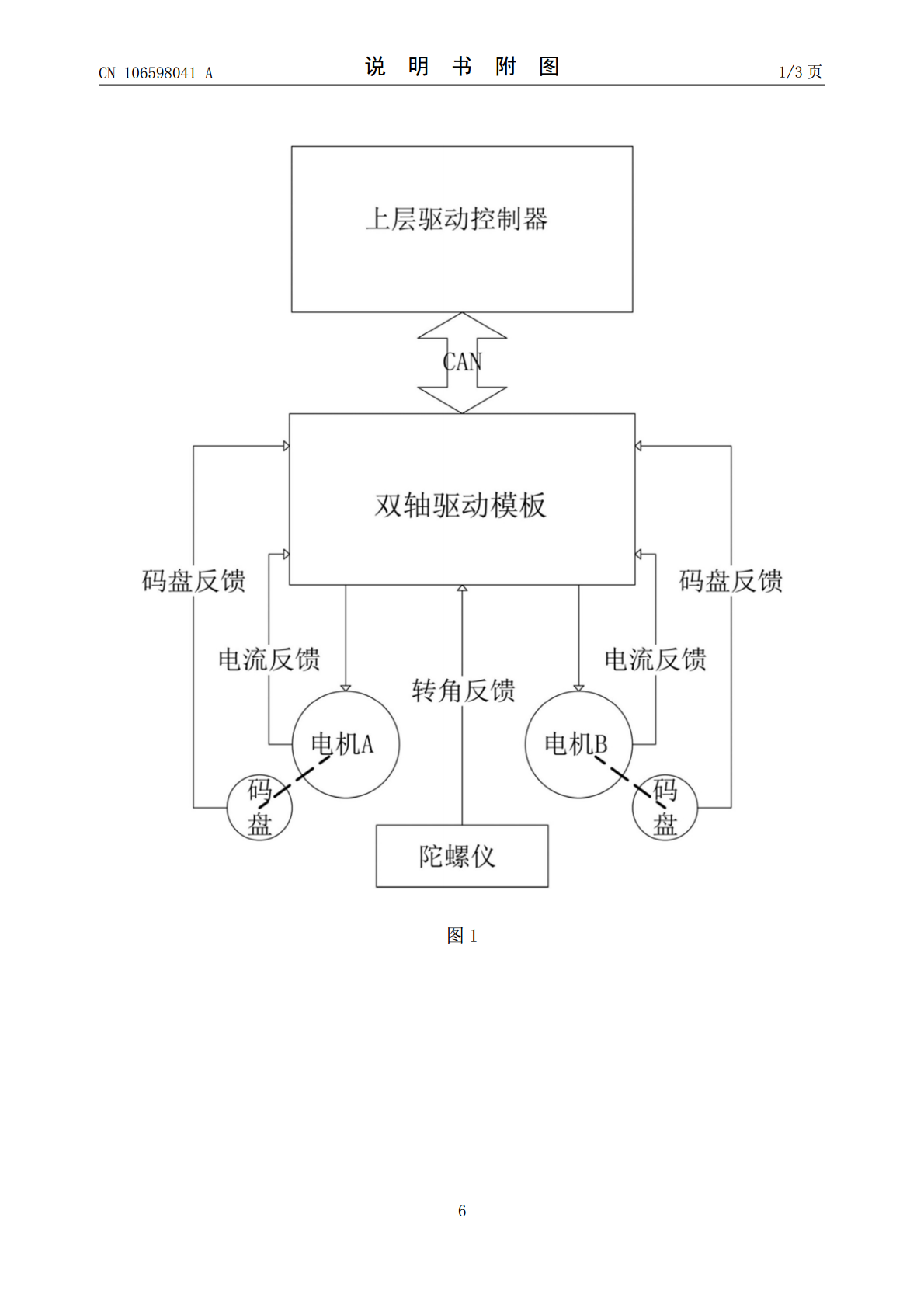
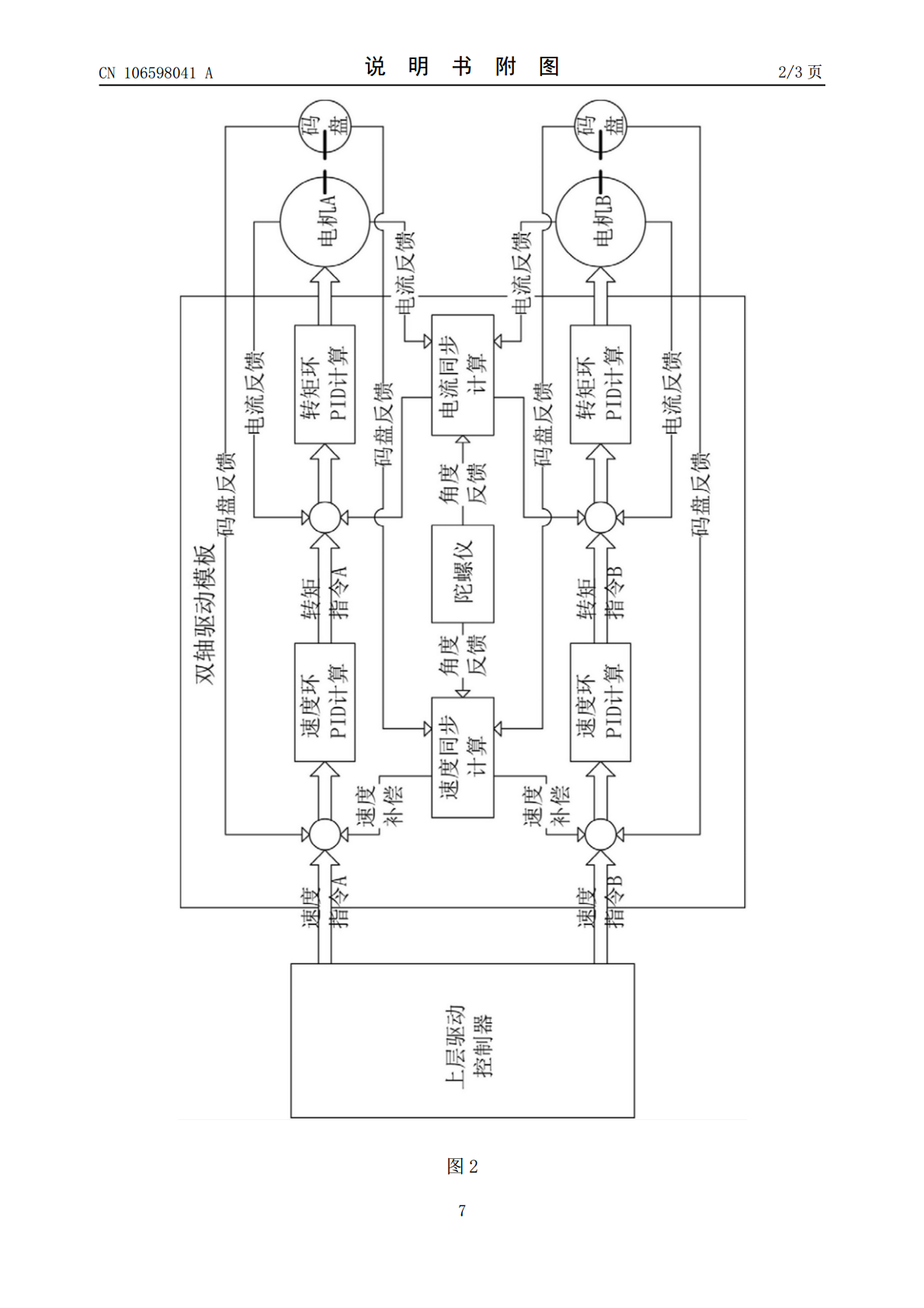
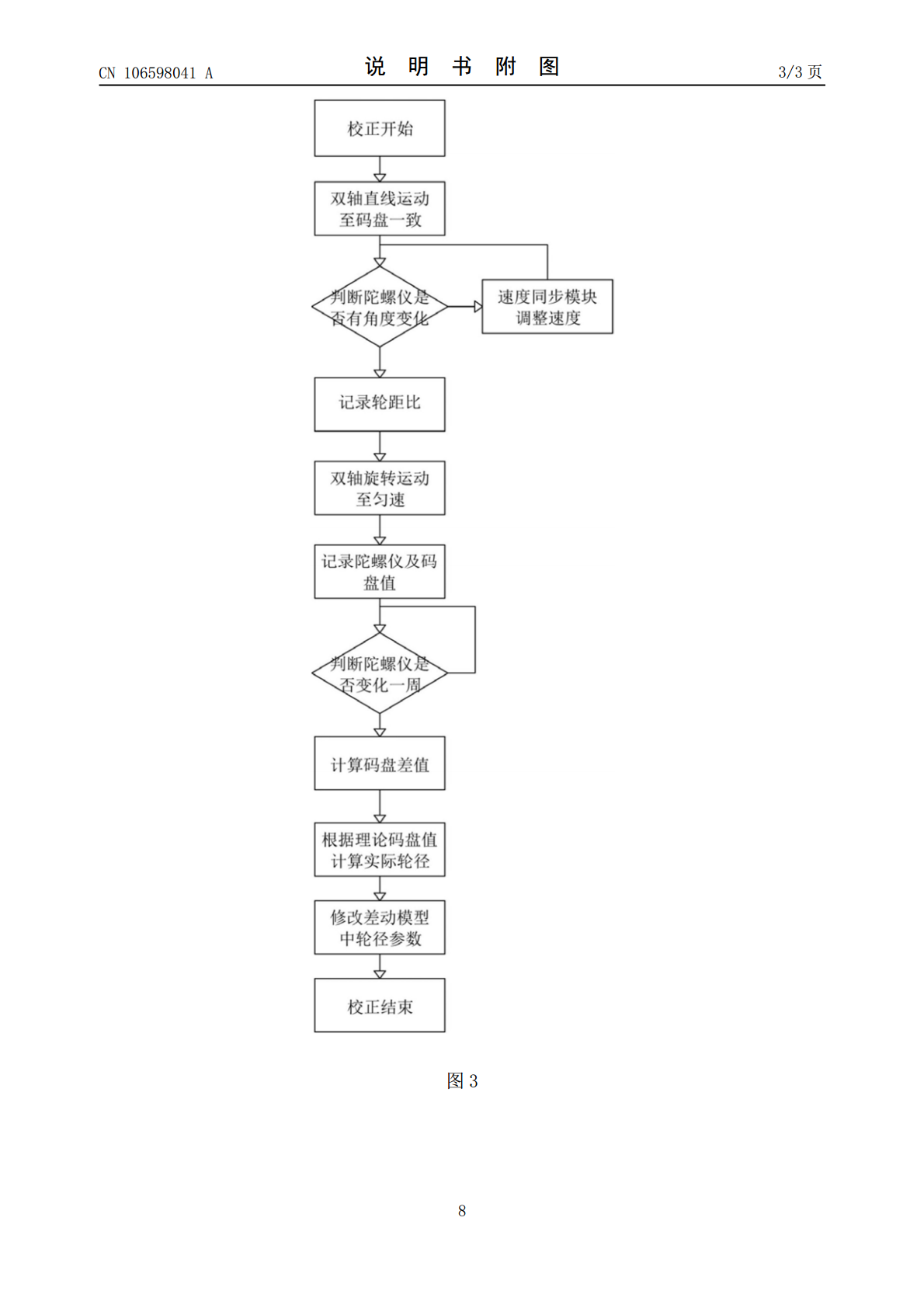
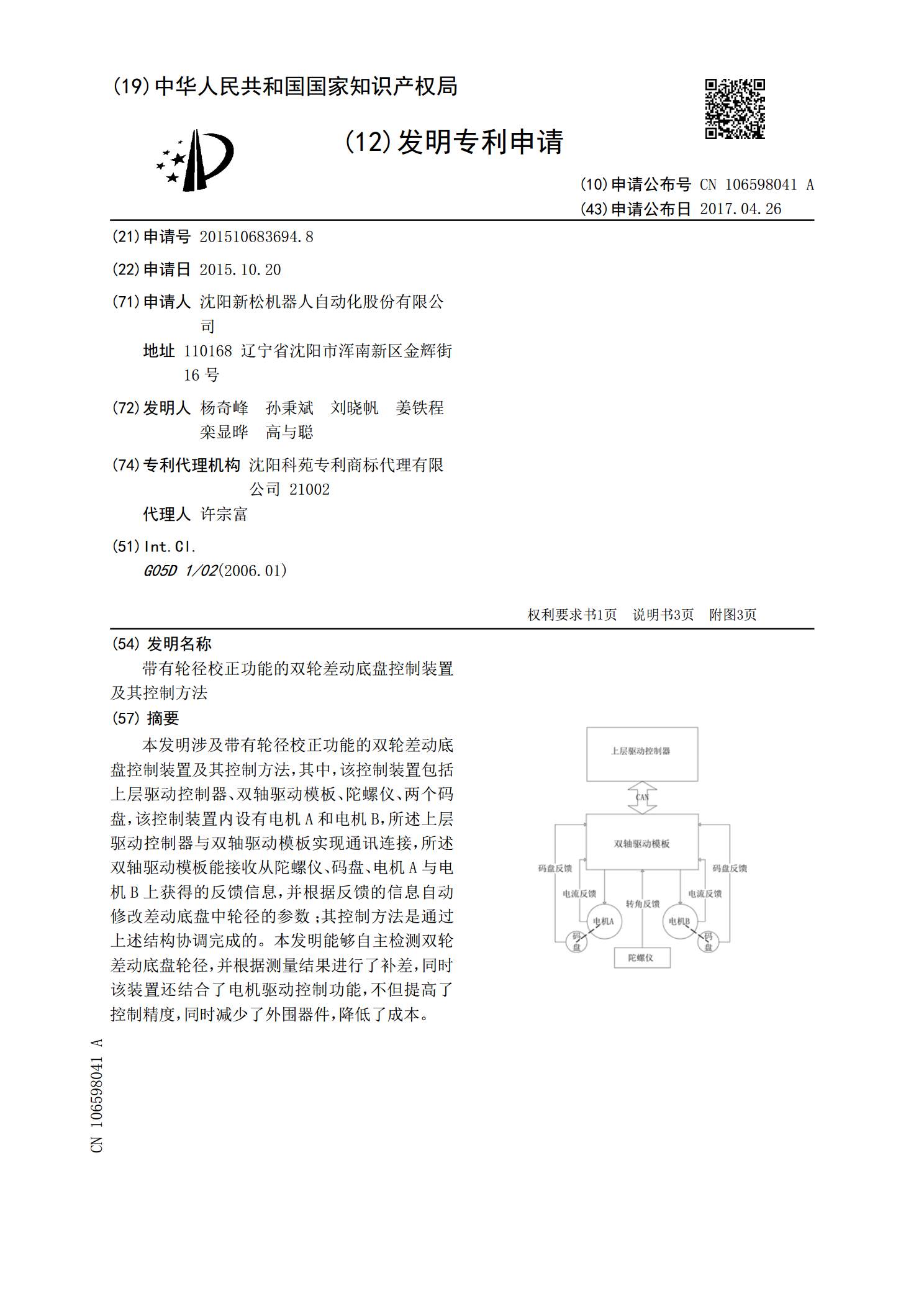
本发明涉及带有轮径校正功能的双轮差动底盘控制装置及其控制方法,其中,该控制装置包括上层驱动控制器、双轴驱动模板、陀螺仪、两个码盘,该控制装置内设有电机A和电机B,所述上层驱动控制器与双轴驱动模板实现通讯连接,所述双轴驱动模板能接收从陀螺仪、码盘、电机A与电机B上获得的反馈信息,并根据反馈的信息自动修改差动底盘中轮径的参数;其控制方法是通过上述结构协调完成的。本发明能够自主检测双轮差动底盘轮径,并根据测量结果进行了补差,同时该装置还结合了电机驱动控制功能,不但提高了控制精度,同时减少了外围器件,降低了成本。

带有自动跟随功能的移位机装置及其控制方法.pdf
带有自动跟随功能的移位机装置及其控制方法,该装置包括吊钩(1)、惯性传感器模块(2)、吊臂(3)、立臂(4)和麦克纳姆轮底盘(7);其解决了卧床病人在被吊运移位时,因脱离护理人员的肢体照护而产生的心理恐惧问题,减轻了护理人员的负担,增强了移位机的安全性。
一种双轮差动小车定位控制方法.pdf
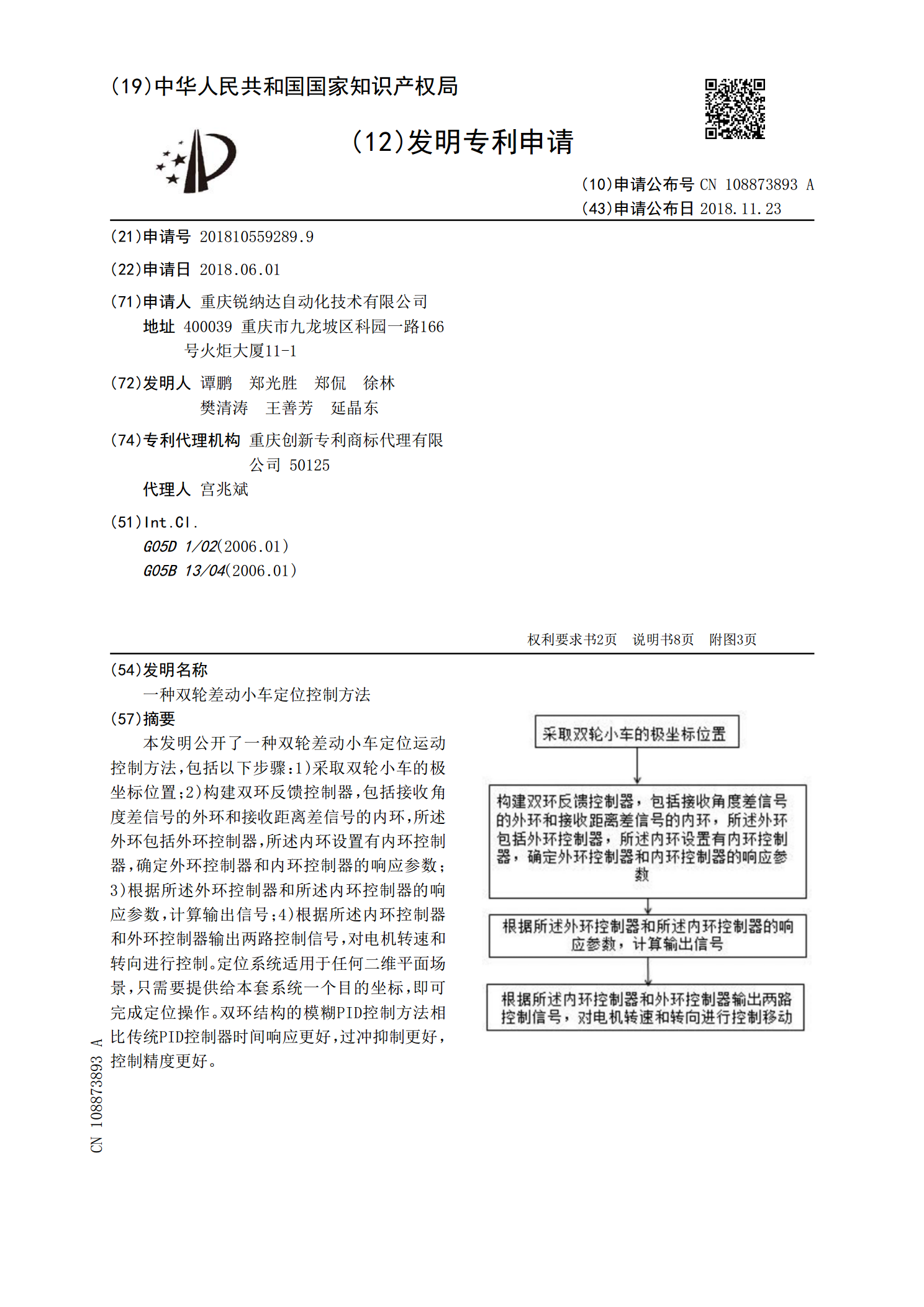
本发明公开了一种双轮差动小车定位运动控制方法,包括以下步骤:1)采取双轮小车的极坐标位置;2)构建双环反馈控制器,包括接收角度差信号的外环和接收距离差信号的内环,所述外环包括外环控制器,所述内环设置有内环控制器,确定外环控制器和内环控制器的响应参数;3)根据所述外环控制器和所述内环控制器的响应参数,计算输出信号;4)根据所述内环控制器和外环控制器输出两路控制信号,对电机转速和转向进行控制。定位系统适用于任何二维平面场景,只需要提供给本套系统一个目的坐标,即可完成定位操作。双环结构的模糊PID控制方法相比传
带有自动升降功能的移位机装置及控制方法.pdf
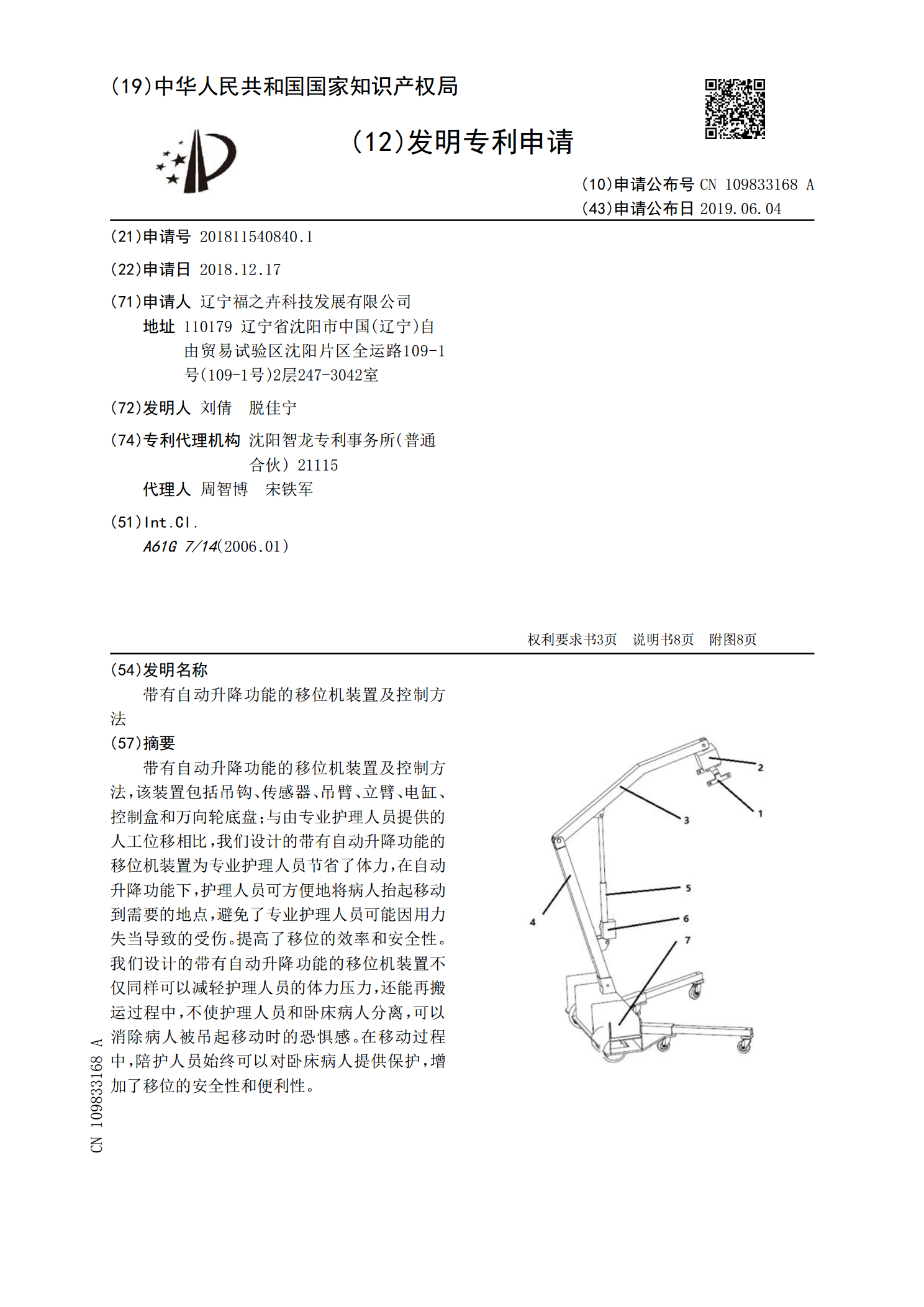
带有自动升降功能的移位机装置及控制方法,该装置包括吊钩、传感器、吊臂、立臂、电缸、控制盒和万向轮底盘;与由专业护理人员提供的人工位移相比,我们设计的带有自动升降功能的移位机装置为专业护理人员节省了体力,在自动升降功能下,护理人员可方便地将病人抬起移动到需要的地点,避免了专业护理人员可能因用力失当导致的受伤。提高了移位的效率和安全性。我们设计的带有自动升降功能的移位机装置不仅同样可以减轻护理人员的体力压力,还能再搬运过程中,不使护理人员和卧床病人分离,可以消除病人被吊起移动时的恐惧感。在移动过程中,陪护人员

差动限制装置的控制装置及控制方法.pdf
一种差动限制装置的控制装置及控制方法,在限制搭载有由制动力的控制来控制车辆的行为的装置的四轮驱动车中的前轮及后轮的差动的差动限制装置的控制装置中,对作为差动限制装置的扭矩耦合器(4)进行控制的ECU(5)具备:基于车辆行驶状态来运算扭矩耦合器(4)的目标扭矩(T)的差动限制力运算装置(511);基于来自控制车辆行为的装置的指令而对目标扭矩(T)进行减少校正的差动限制力校正装置(512);及运算扭矩耦合器(4)的热负荷量的热负荷量运算装置(513),差动限制力校正装置(512)在扭矩耦合器(4)的热负荷量为