
一种双轮差动小车定位控制方法.pdf

一条****88


1/10

2/10

3/10

4/10

5/10

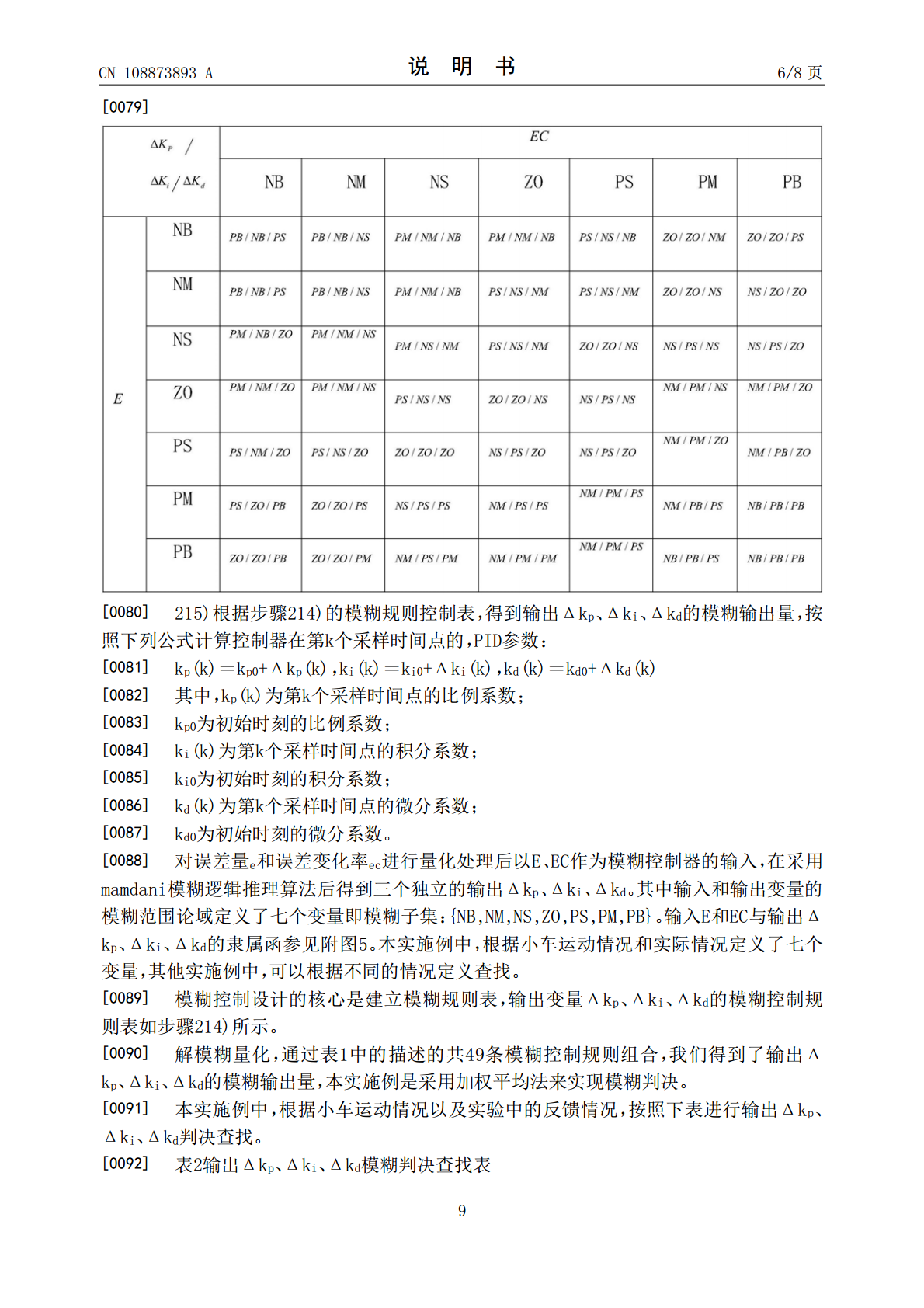
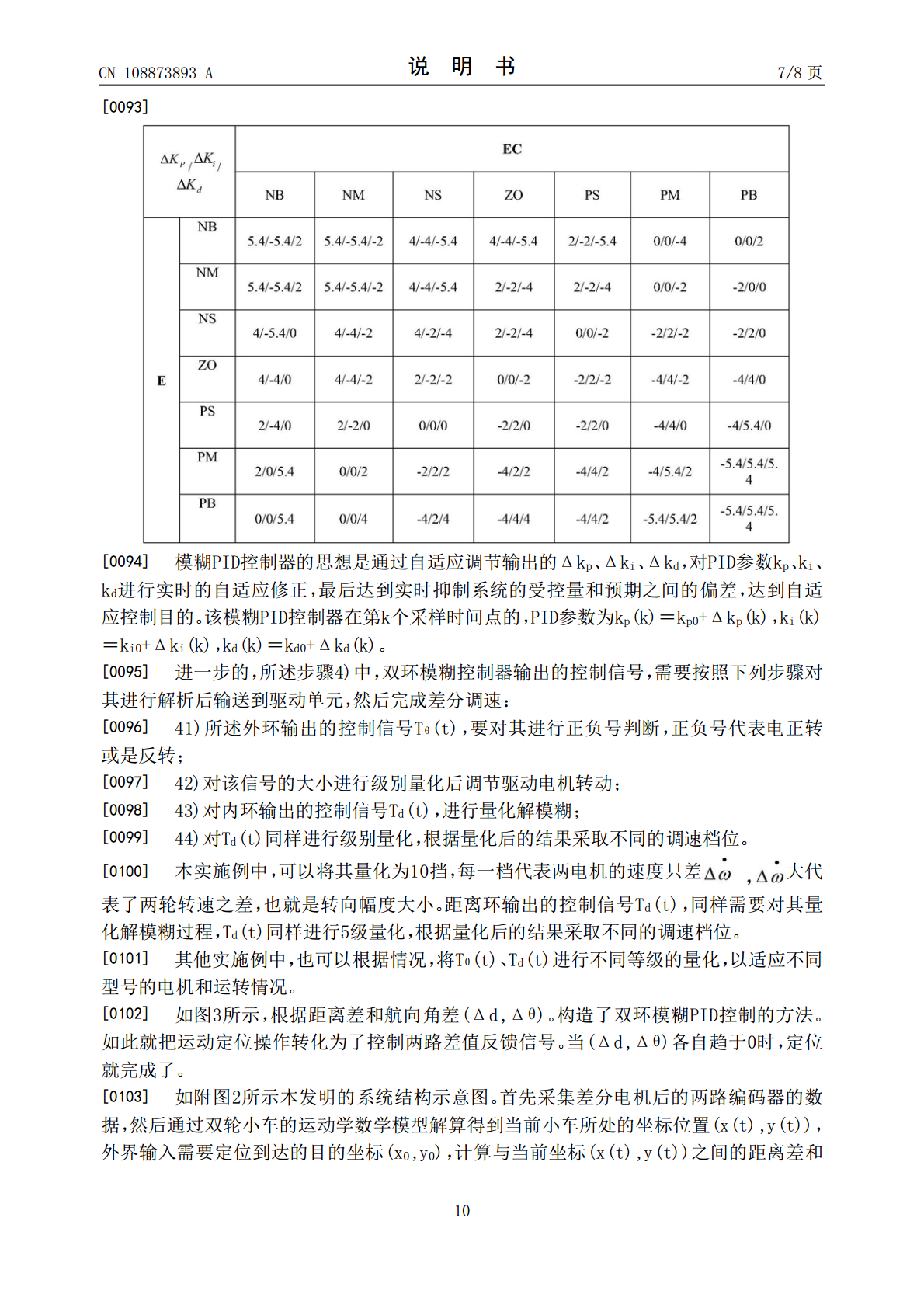
6/10
7/10
8/10
9/10
10/10
亲,该文档总共14页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种双轮差动小车定位控制方法.pdf
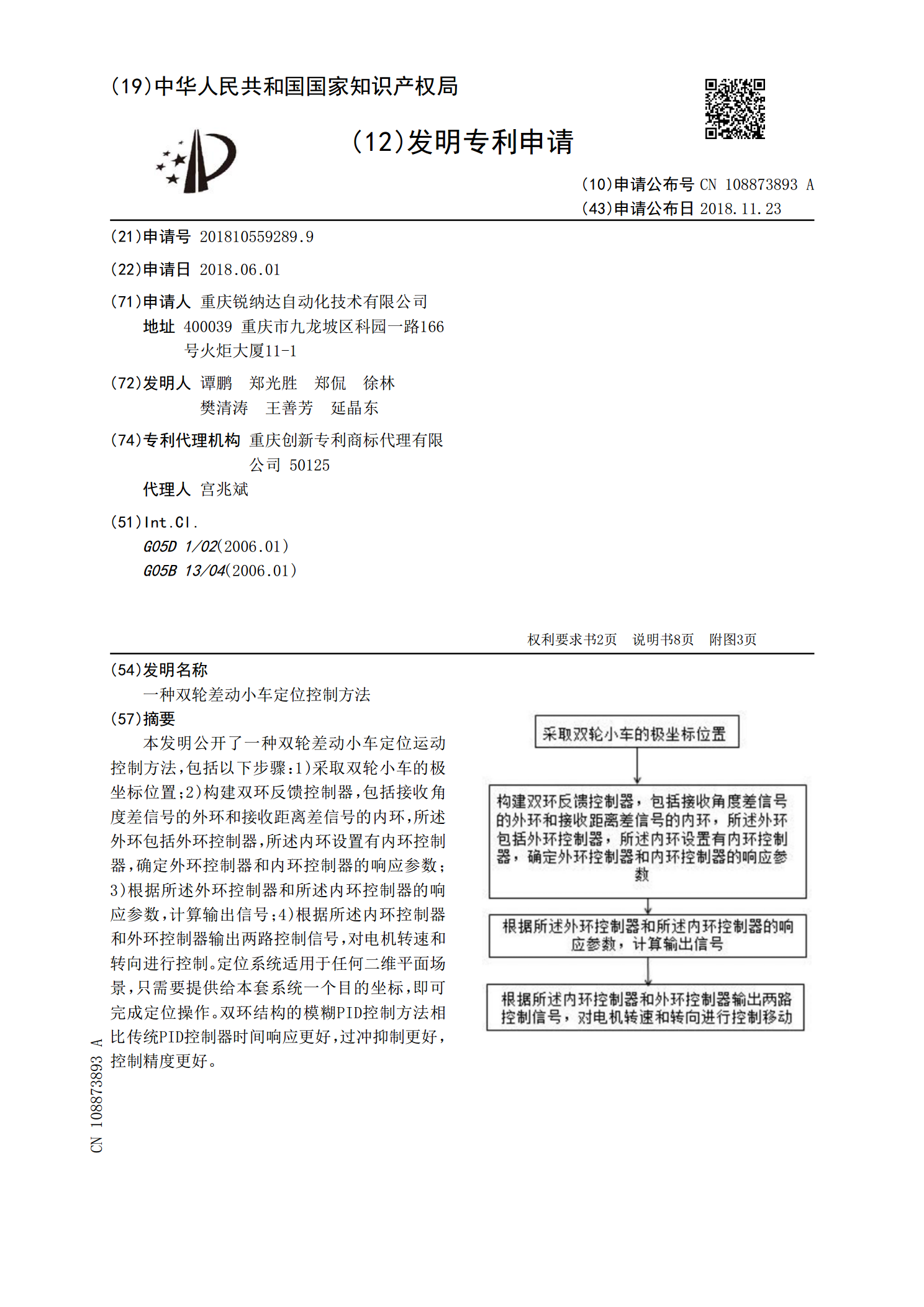
本发明公开了一种双轮差动小车定位运动控制方法,包括以下步骤:1)采取双轮小车的极坐标位置;2)构建双环反馈控制器,包括接收角度差信号的外环和接收距离差信号的内环,所述外环包括外环控制器,所述内环设置有内环控制器,确定外环控制器和内环控制器的响应参数;3)根据所述外环控制器和所述内环控制器的响应参数,计算输出信号;4)根据所述内环控制器和外环控制器输出两路控制信号,对电机转速和转向进行控制。定位系统适用于任何二维平面场景,只需要提供给本套系统一个目的坐标,即可完成定位操作。双环结构的模糊PID控制方法相比传
一种双轮差动式机器人运动控制方法.pdf
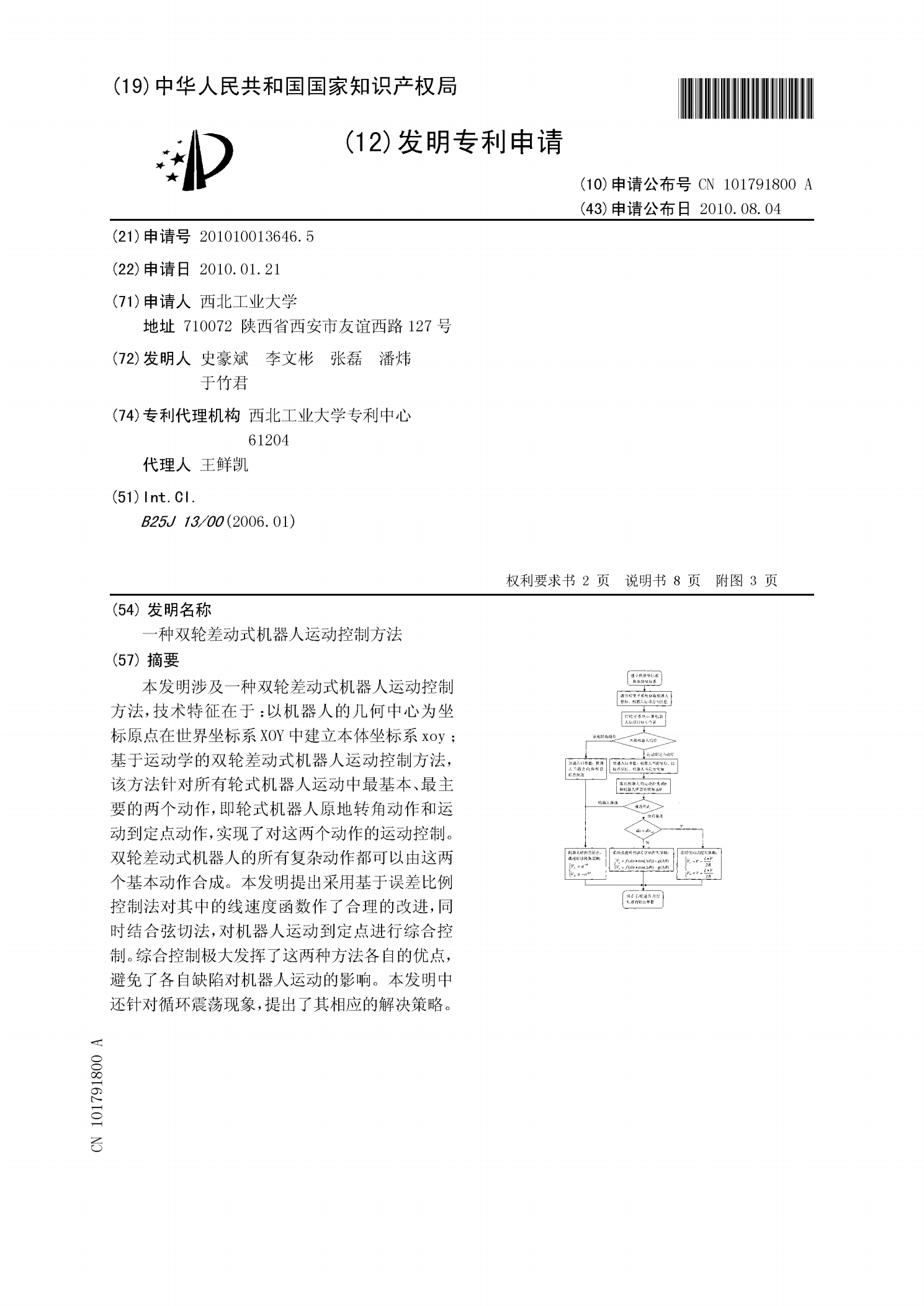
本发明涉及一种双轮差动式机器人运动控制方法,技术特征在于:以机器人的几何中心为坐标原点在世界坐标系XOY中建立本体坐标系xoy;基于运动学的双轮差动式机器人运动控制方法,该方法针对所有轮式机器人运动中最基本、最主要的两个动作,即轮式机器人原地转角动作和运动到定点动作,实现了对这两个动作的运动控制。双轮差动式机器人的所有复杂动作都可以由这两个基本动作合成。本发明提出采用基于误差比例控制法对其中的线速度函数作了合理的改进,同时结合弦切法,对机器人运动到定点进行综合控制。综合控制极大发挥了这两种方法各自的优点,
带有轮径校正功能的双轮差动底盘控制装置及其控制方法.pdf
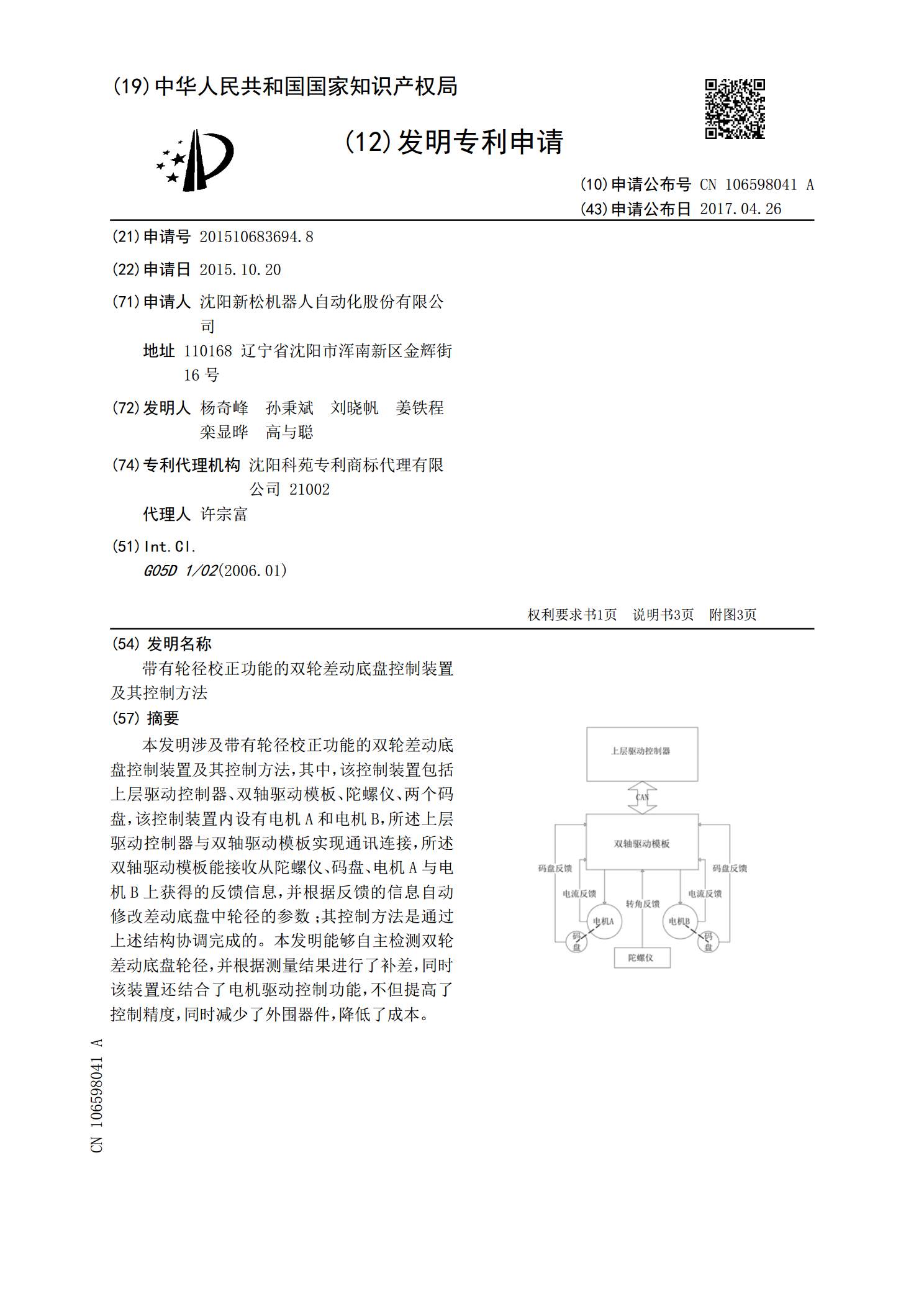
本发明涉及带有轮径校正功能的双轮差动底盘控制装置及其控制方法,其中,该控制装置包括上层驱动控制器、双轴驱动模板、陀螺仪、两个码盘,该控制装置内设有电机A和电机B,所述上层驱动控制器与双轴驱动模板实现通讯连接,所述双轴驱动模板能接收从陀螺仪、码盘、电机A与电机B上获得的反馈信息,并根据反馈的信息自动修改差动底盘中轮径的参数;其控制方法是通过上述结构协调完成的。本发明能够自主检测双轮差动底盘轮径,并根据测量结果进行了补差,同时该装置还结合了电机驱动控制功能,不但提高了控制精度,同时减少了外围器件,降低了成本。
一种双轮自平衡小车的控制系统.pdf
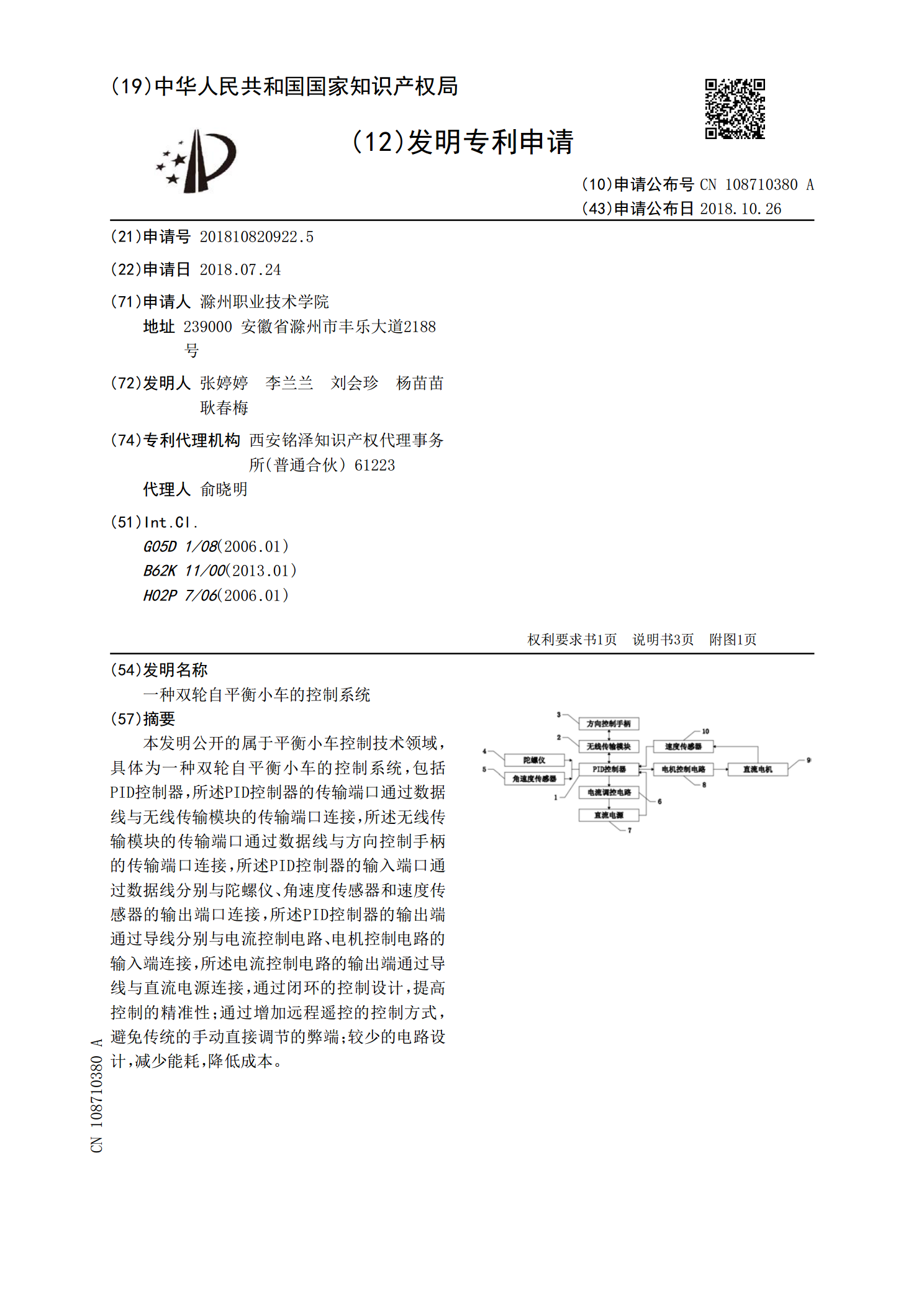
本发明公开的属于平衡小车控制技术领域,具体为一种双轮自平衡小车的控制系统,包括PID控制器,所述PID控制器的传输端口通过数据线与无线传输模块的传输端口连接,所述无线传输模块的传输端口通过数据线与方向控制手柄的传输端口连接,所述PID控制器的输入端口通过数据线分别与陀螺仪、角速度传感器和速度传感器的输出端口连接,所述PID控制器的输出端通过导线分别与电流控制电路、电机控制电路的输入端连接,所述电流控制电路的输出端通过导线与直流电源连接,通过闭环的控制设计,提高控制的精准性;通过增加远程遥控的控制方式,避免
一种小车位移检测及定位控制方法.pdf
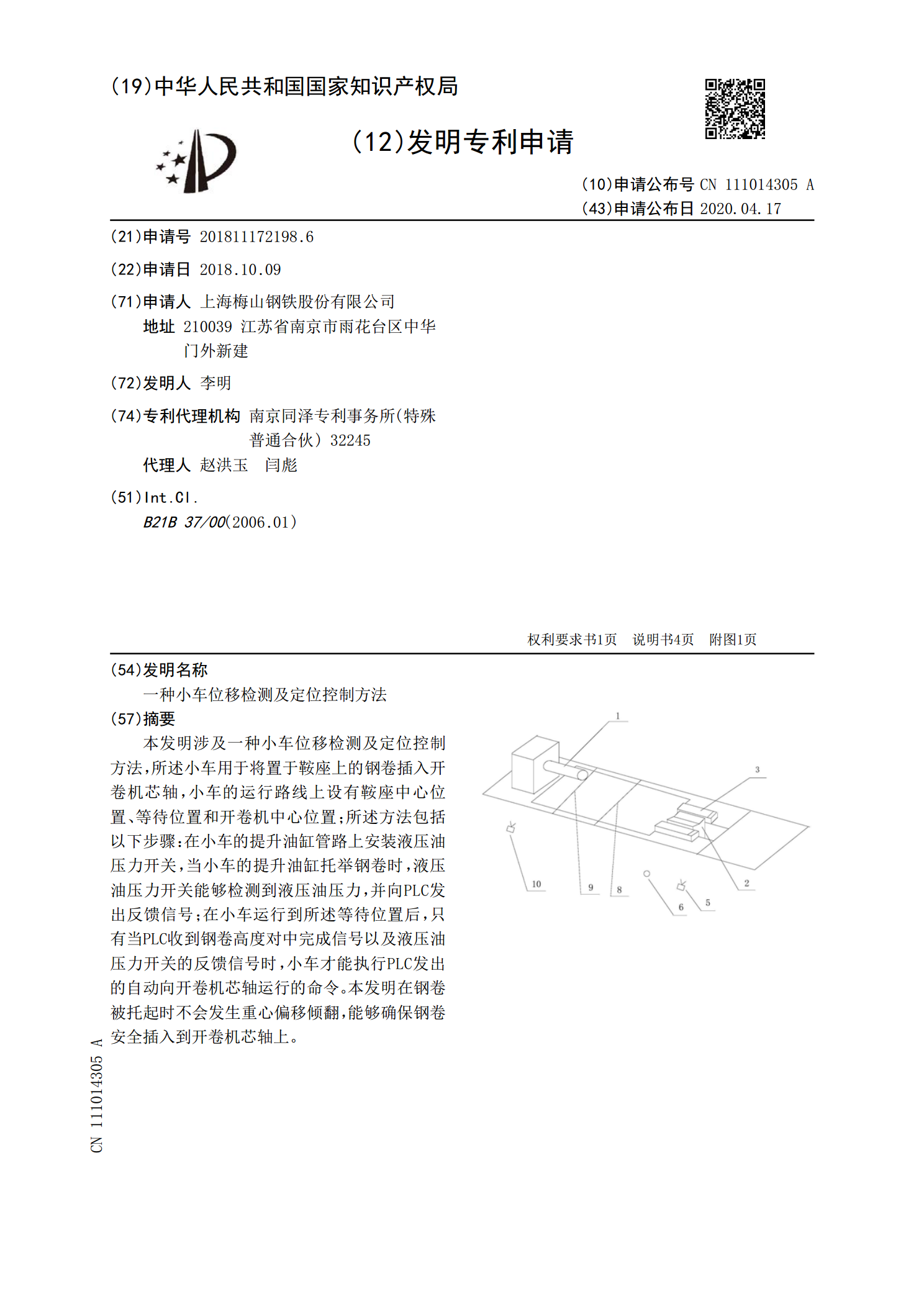
本发明涉及一种小车位移检测及定位控制方法,所述小车用于将置于鞍座上的钢卷插入开卷机芯轴,小车的运行路线上设有鞍座中心位置、等待位置和开卷机中心位置;所述方法包括以下步骤:在小车的提升油缸管路上安装液压油压力开关,当小车的提升油缸托举钢卷时,液压油压力开关能够检测到液压油压力,并向PLC发出反馈信号;在小车运行到所述等待位置后,只有当PLC收到钢卷高度对中完成信号以及液压油压力开关的反馈信号时,小车才能执行PLC发出的自动向开卷机芯轴运行的命令。本发明在钢卷被托起时不会发生重心偏移倾翻,能够确保钢卷安全插入