
智能全向移载平台泊车机器人及其控制方法.pdf

白凡****12

1/10
2/10
3/10
4/10
5/10
6/10

7/10
8/10
9/10
10/10
亲,该文档总共22页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
智能全向移载平台泊车机器人及其控制方法.pdf
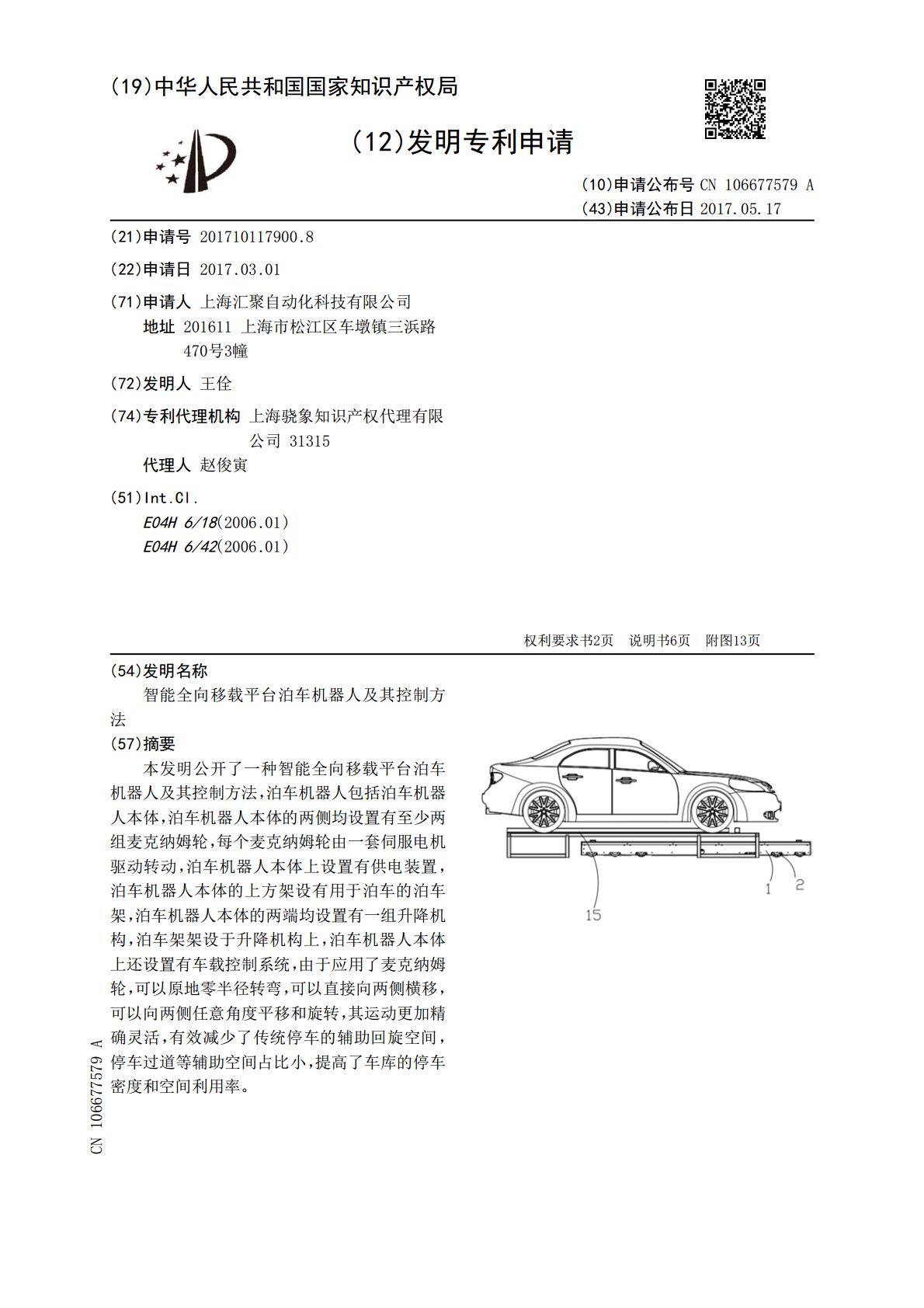
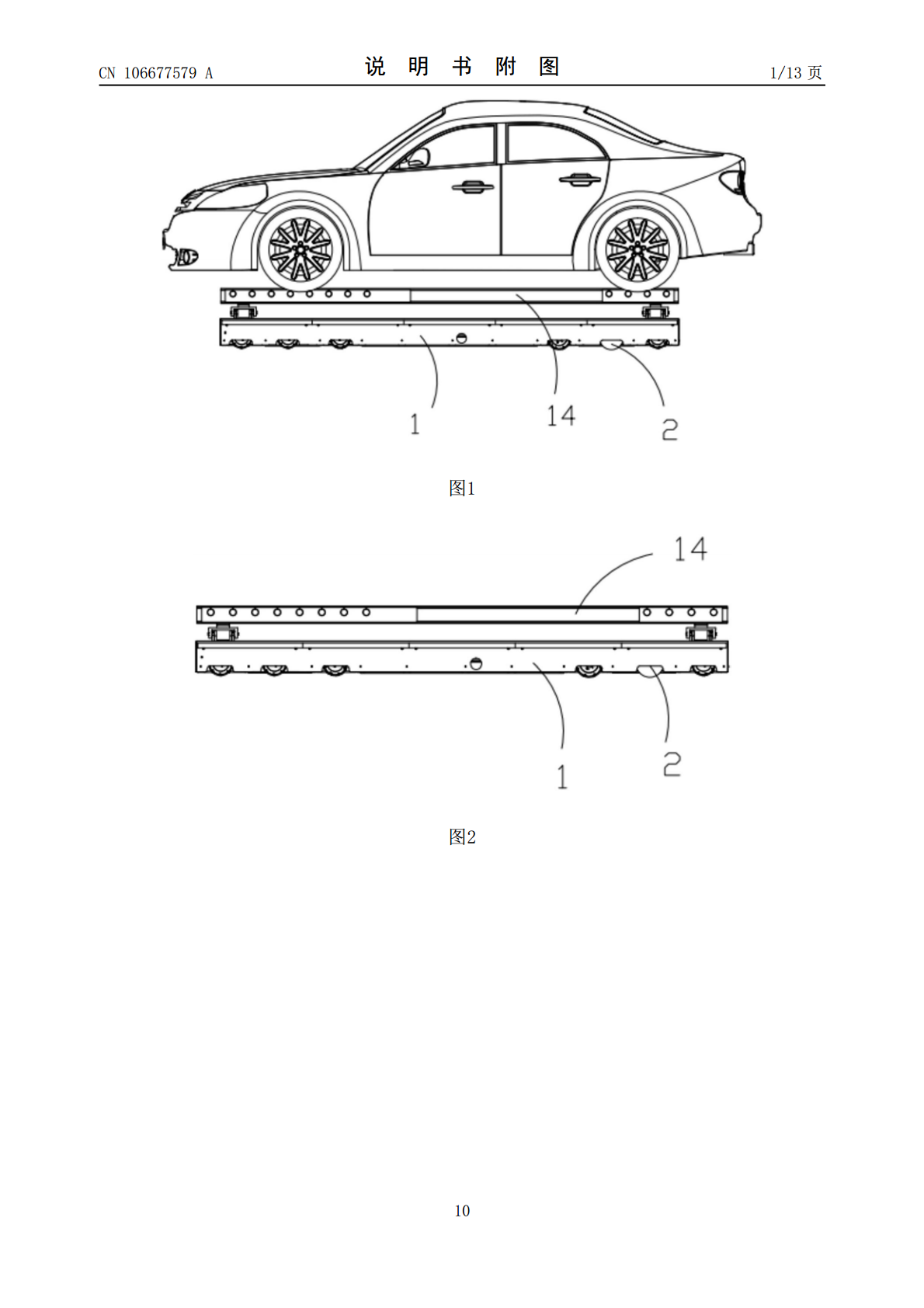
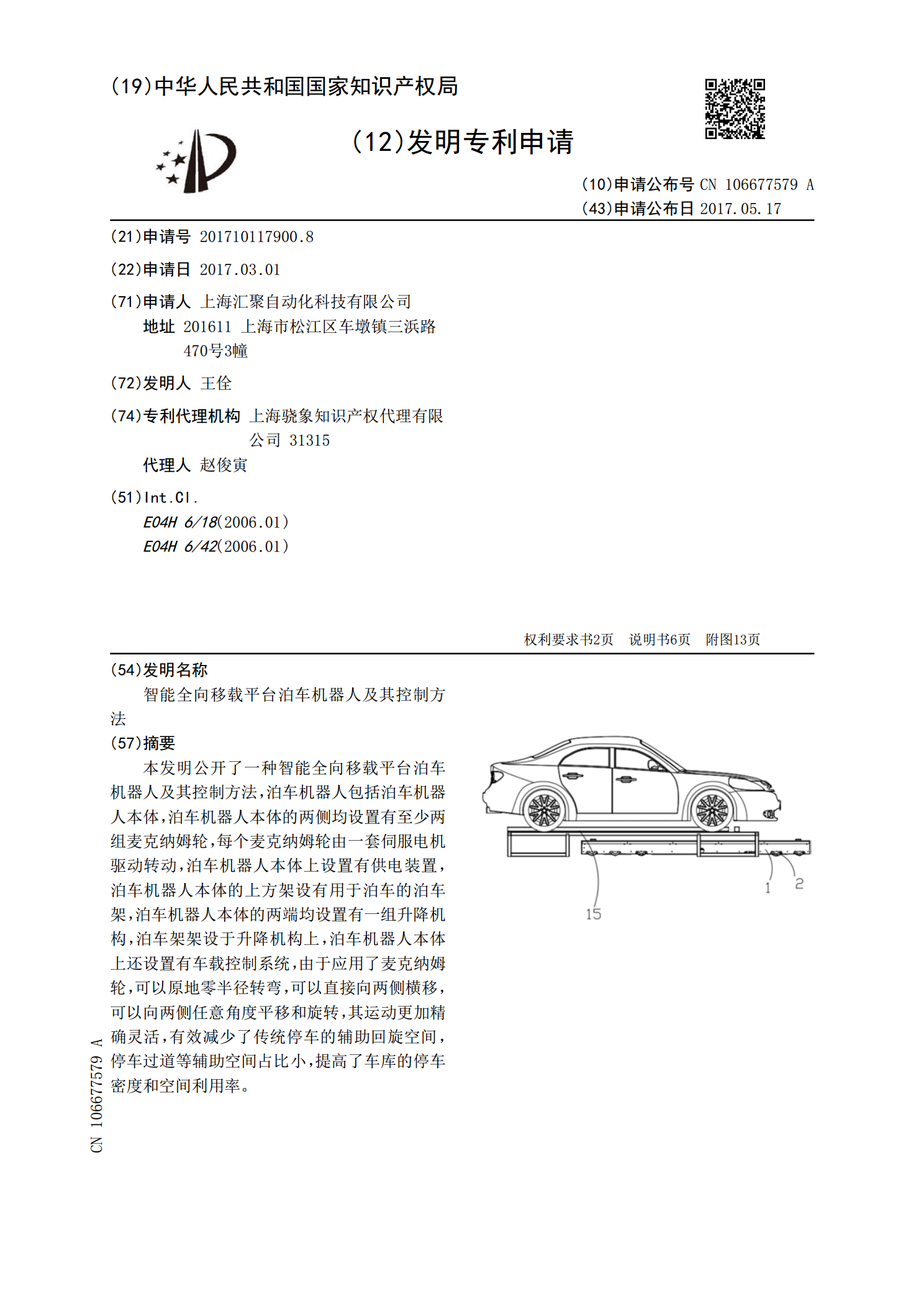
本发明公开了一种智能全向移载平台泊车机器人及其控制方法,泊车机器人包括泊车机器人本体,泊车机器人本体的两侧均设置有至少两组麦克纳姆轮,每个麦克纳姆轮由一套伺服电机驱动转动,泊车机器人本体上设置有供电装置,泊车机器人本体的上方架设有用于泊车的泊车架,泊车机器人本体的两端均设置有一组升降机构,泊车架架设于升降机构上,泊车机器人本体上还设置有车载控制系统,由于应用了麦克纳姆轮,可以原地零半径转弯,可以直接向两侧横移,可以向两侧任意角度平移和旋转,其运动更加精确灵活,有效减少了传统停车的辅助回旋空间,停车过道等辅
一种自动化停车库用智能全向移载平台泊车系统及方法.pdf
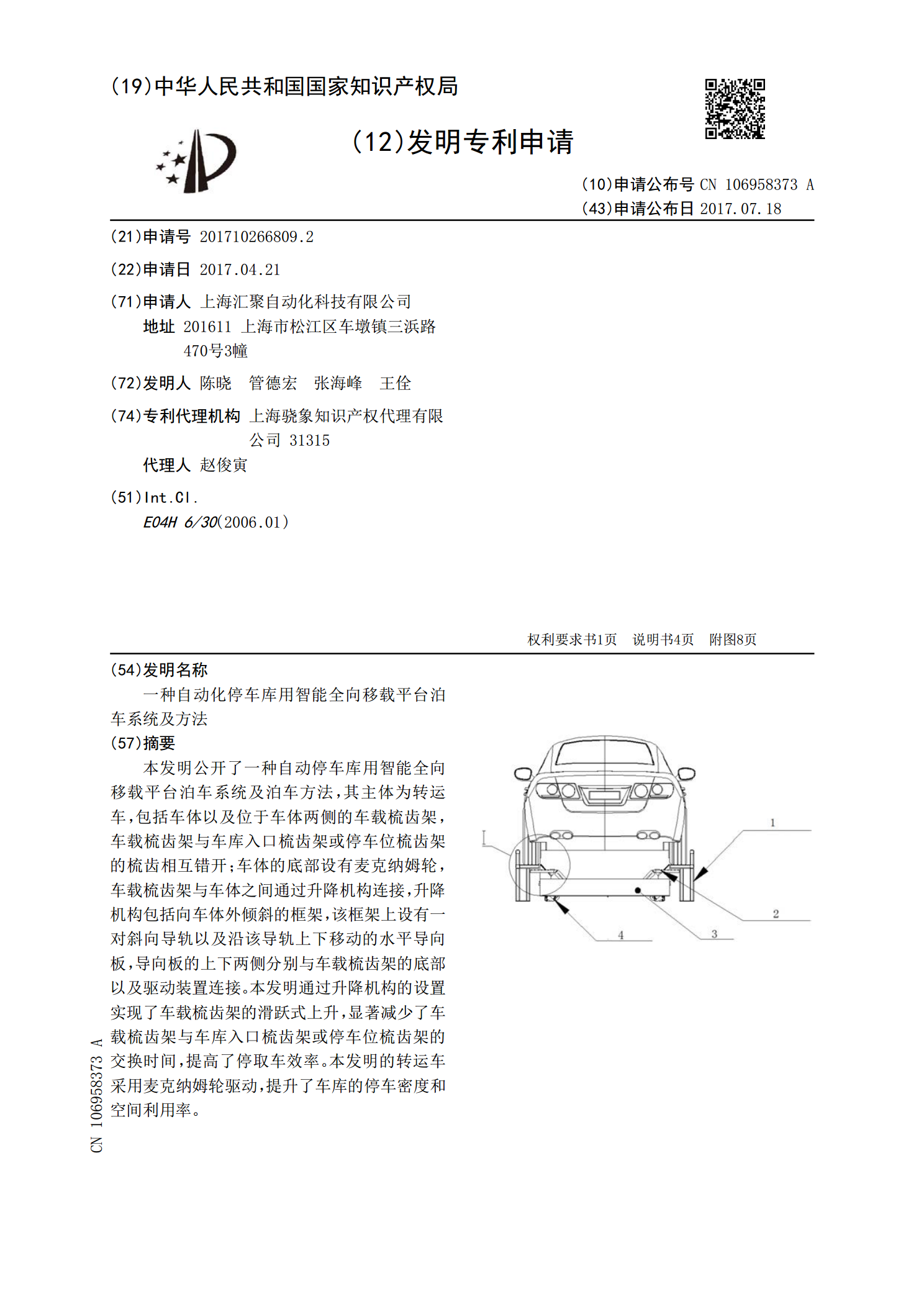
本发明公开了一种自动停车库用智能全向移载平台泊车系统及泊车方法,其主体为转运车,包括车体以及位于车体两侧的车载梳齿架,车载梳齿架与车库入口梳齿架或停车位梳齿架的梳齿相互错开;车体的底部设有麦克纳姆轮,车载梳齿架与车体之间通过升降机构连接,升降机构包括向车体外倾斜的框架,该框架上设有一对斜向导轨以及沿该导轨上下移动的水平导向板,导向板的上下两侧分别与车载梳齿架的底部以及驱动装置连接。本发明通过升降机构的设置实现了车载梳齿架的滑跃式上升,显著减少了车载梳齿架与车库入口梳齿架或停车位梳齿架的交换时间,提高了停取
智能泊车系统及其控制方法.pdf
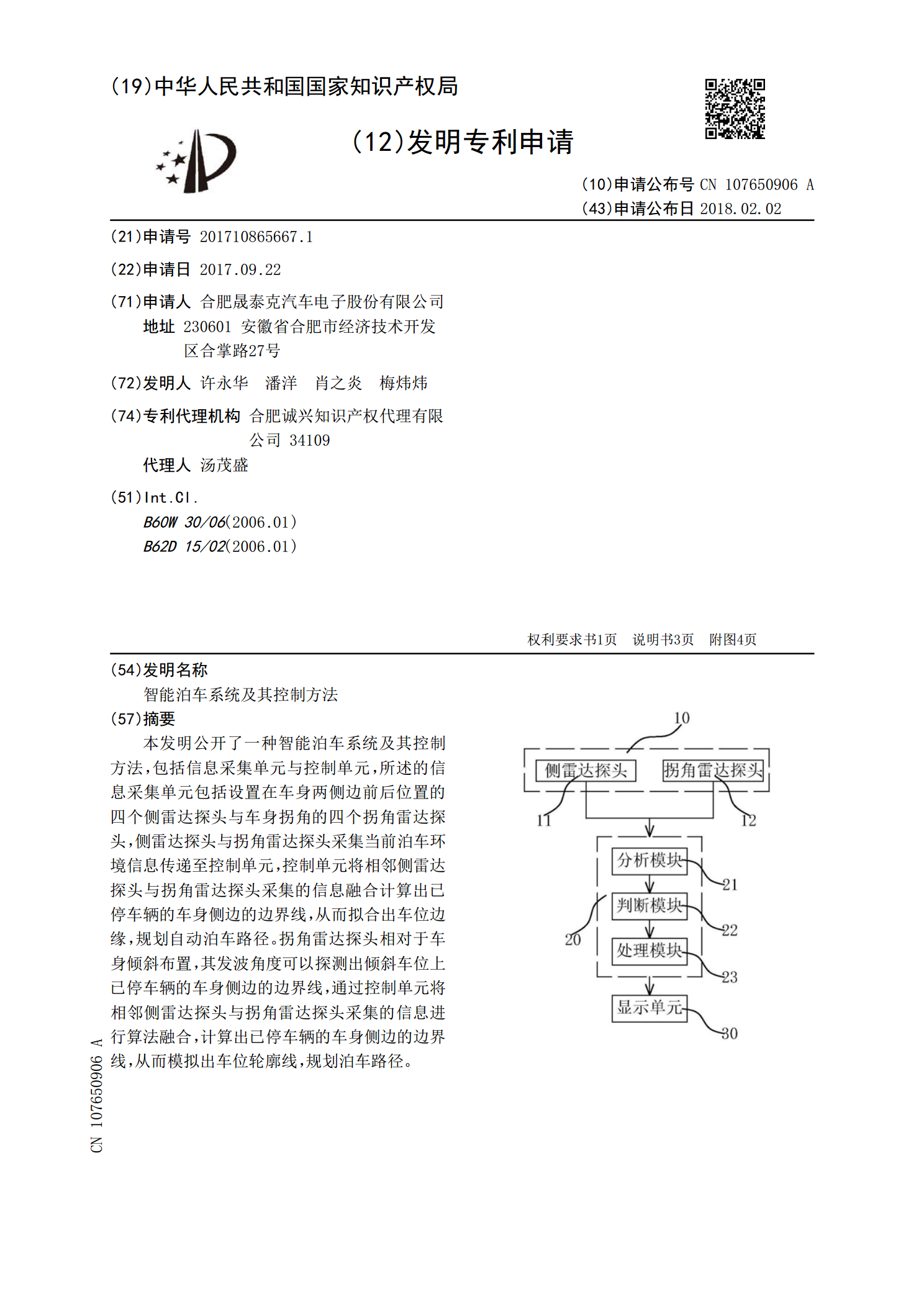
本发明公开了一种智能泊车系统及其控制方法,包括信息采集单元与控制单元,所述的信息采集单元包括设置在车身两侧边前后位置的四个侧雷达探头与车身拐角的四个拐角雷达探头,侧雷达探头与拐角雷达探头采集当前泊车环境信息传递至控制单元,控制单元将相邻侧雷达探头与拐角雷达探头采集的信息融合计算出已停车辆的车身侧边的边界线,从而拟合出车位边缘,规划自动泊车路径。拐角雷达探头相对于车身倾斜布置,其发波角度可以探测出倾斜车位上已停车辆的车身侧边的边界线,通过控制单元将相邻侧雷达探头与拐角雷达探头采集的信息进行算法融合,计算出已
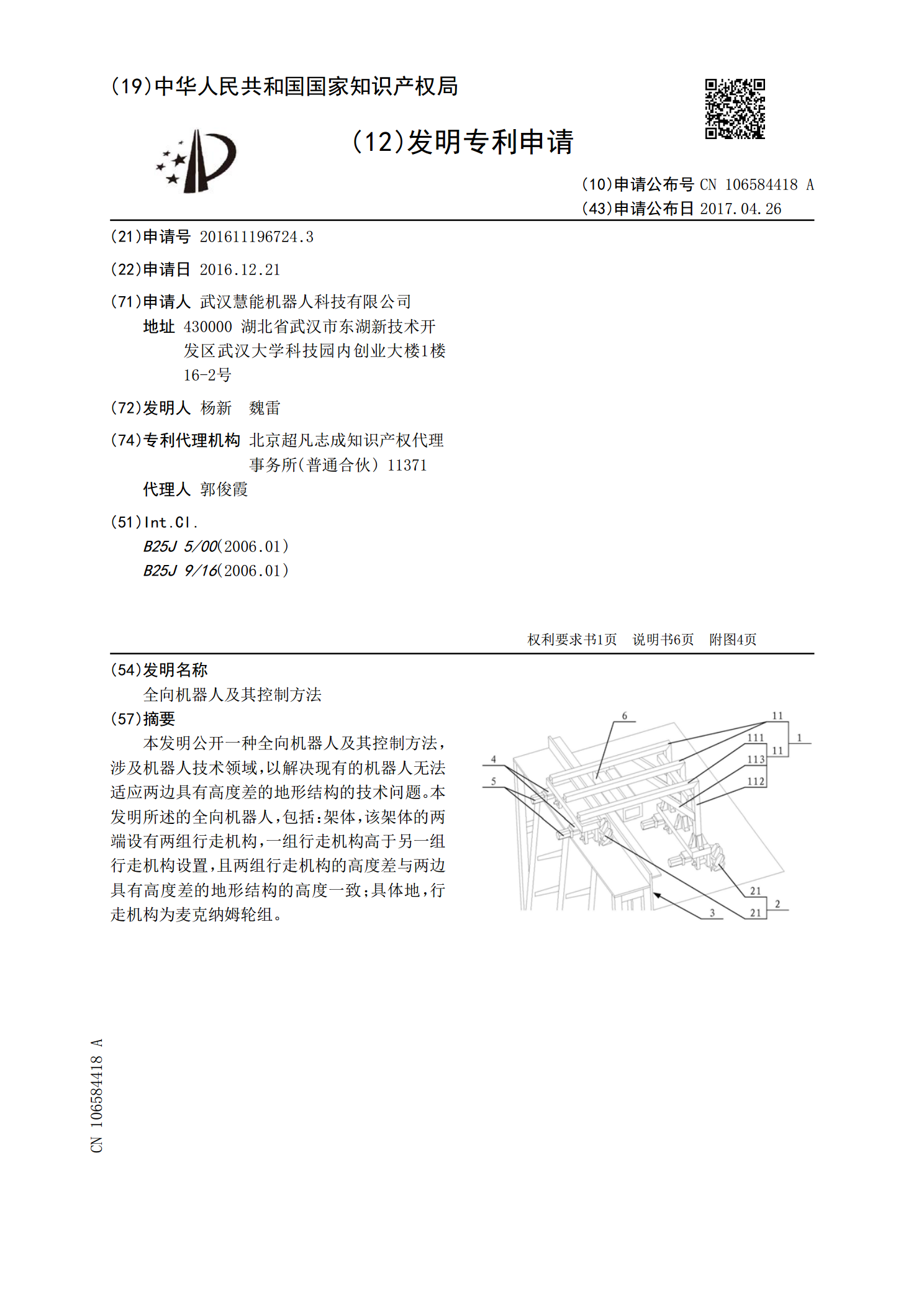
全向机器人及其控制方法.pdf
本发明公开一种全向机器人及其控制方法,涉及机器人技术领域,以解决现有的机器人无法适应两边具有高度差的地形结构的技术问题。本发明所述的全向机器人,包括:架体,该架体的两端设有两组行走机构,一组行走机构高于另一组行走机构设置,且两组行走机构的高度差与两边具有高度差的地形结构的高度一致;具体地,行走机构为麦克纳姆轮组。
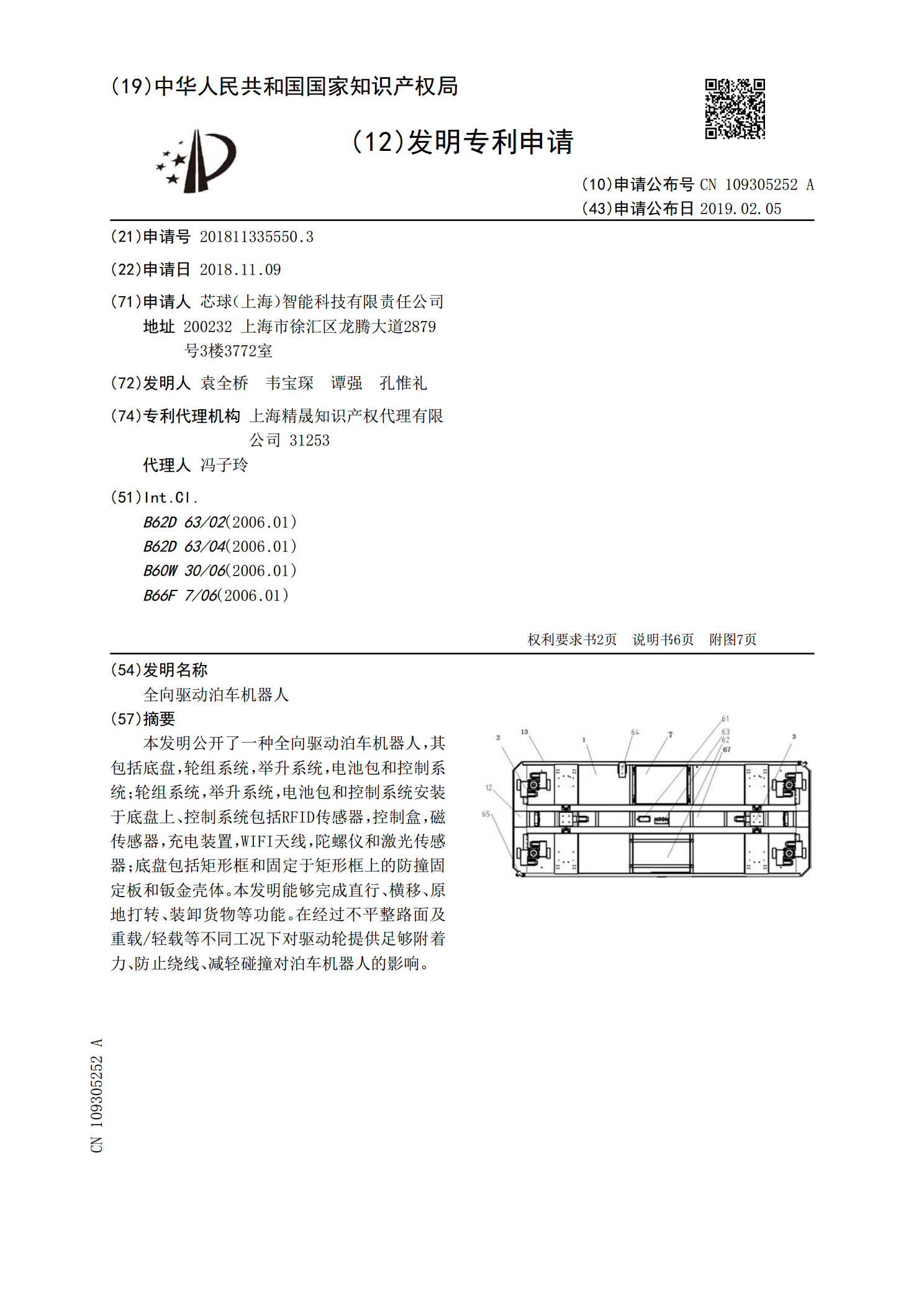
全向驱动泊车机器人.pdf
本发明公开了一种全向驱动泊车机器人,其包括底盘,轮组系统,举升系统,电池包和控制系统;轮组系统,举升系统,电池包和控制系统安装于底盘上、控制系统包括RFID传感器,控制盒,磁传感器,充电装置,WIFI天线,陀螺仪和激光传感器;底盘包括矩形框和固定于矩形框上的防撞固定板和钣金壳体。本发明能够完成直行、横移、原地打转、装卸货物等功能。在经过不平整路面及重载/轻载等不同工况下对驱动轮提供足够附着力、防止绕线、减轻碰撞对泊车机器人的影响。