
全向机器人及其控制方法.pdf

小琛****82


1/10
2/10

3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共12页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
全向机器人及其控制方法.pdf
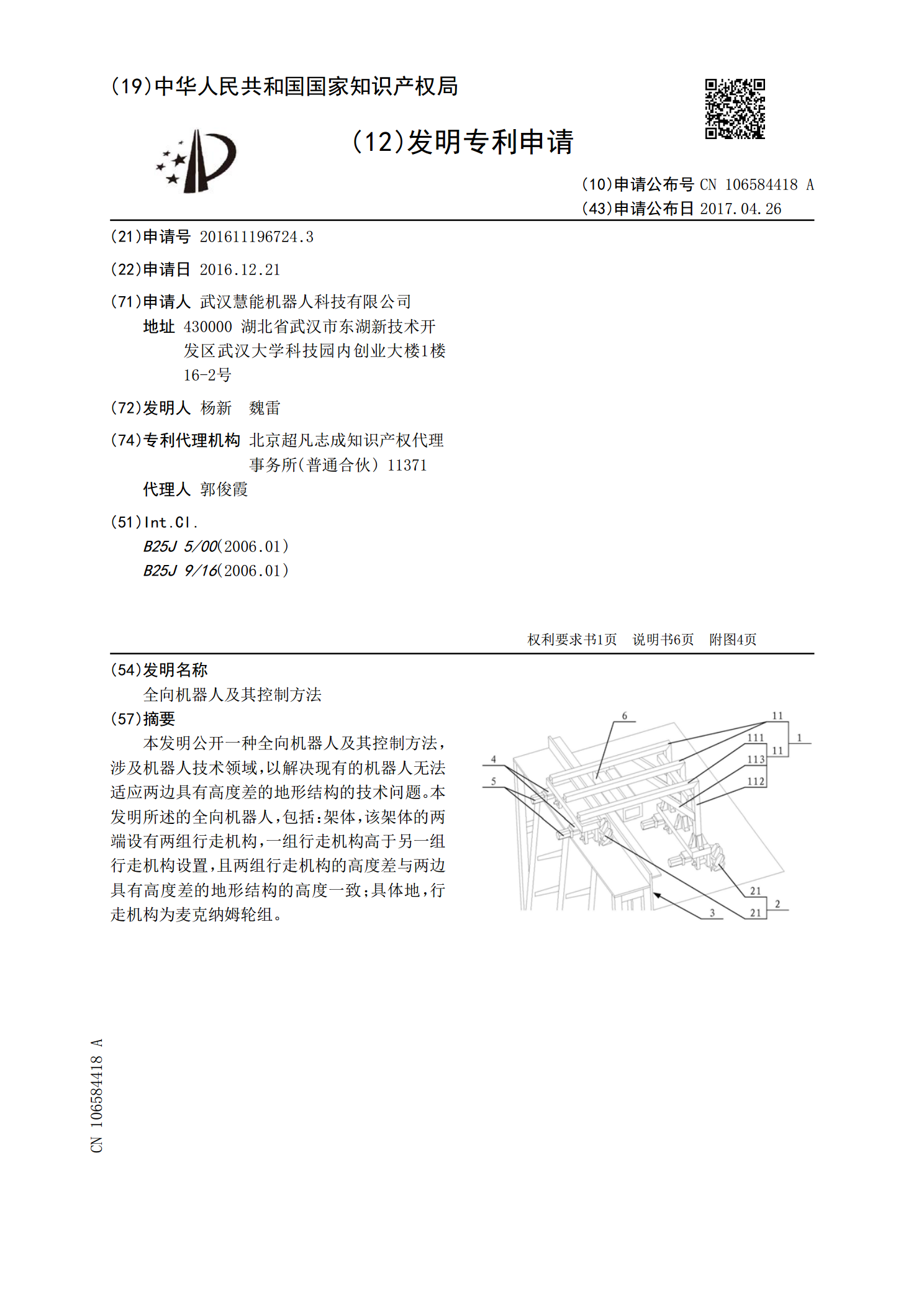
本发明公开一种全向机器人及其控制方法,涉及机器人技术领域,以解决现有的机器人无法适应两边具有高度差的地形结构的技术问题。本发明所述的全向机器人,包括:架体,该架体的两端设有两组行走机构,一组行走机构高于另一组行走机构设置,且两组行走机构的高度差与两边具有高度差的地形结构的高度一致;具体地,行走机构为麦克纳姆轮组。
智能全向移载平台泊车机器人及其控制方法.pdf
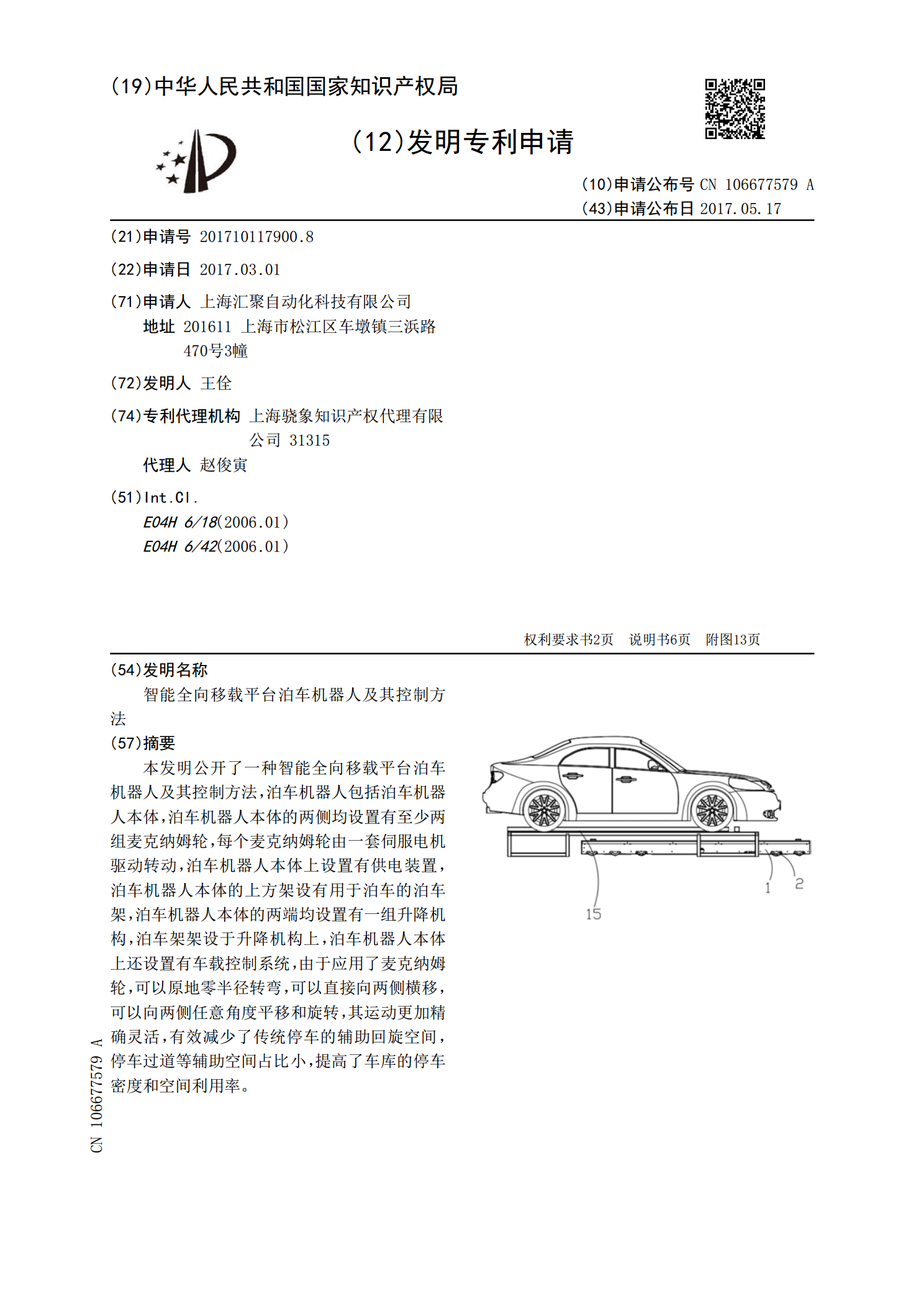
本发明公开了一种智能全向移载平台泊车机器人及其控制方法,泊车机器人包括泊车机器人本体,泊车机器人本体的两侧均设置有至少两组麦克纳姆轮,每个麦克纳姆轮由一套伺服电机驱动转动,泊车机器人本体上设置有供电装置,泊车机器人本体的上方架设有用于泊车的泊车架,泊车机器人本体的两端均设置有一组升降机构,泊车架架设于升降机构上,泊车机器人本体上还设置有车载控制系统,由于应用了麦克纳姆轮,可以原地零半径转弯,可以直接向两侧横移,可以向两侧任意角度平移和旋转,其运动更加精确灵活,有效减少了传统停车的辅助回旋空间,停车过道等辅
一种全向运动的汽车搬运机器人及其控制方法.pdf
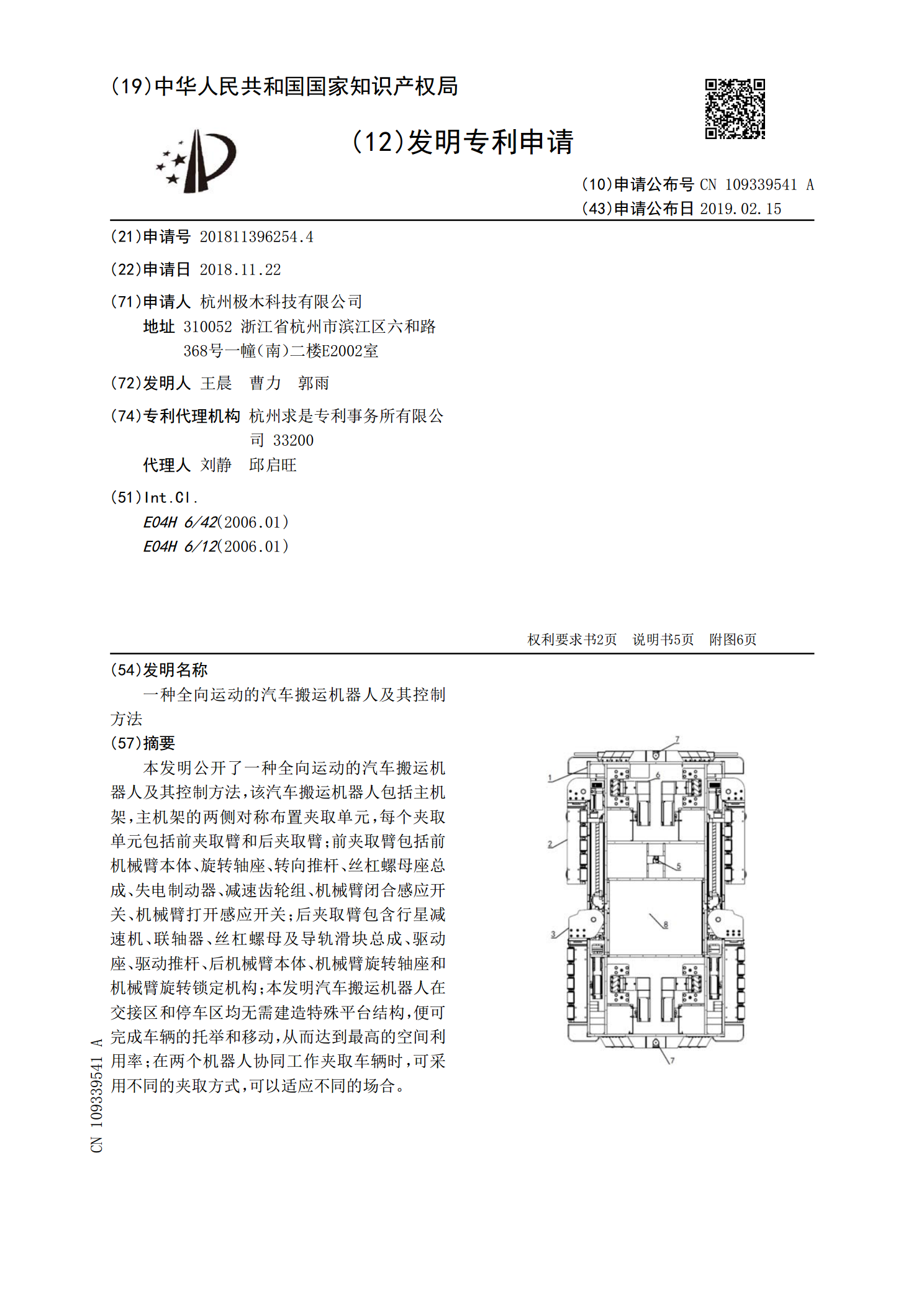
本发明公开了一种全向运动的汽车搬运机器人及其控制方法,该汽车搬运机器人包括主机架,主机架的两侧对称布置夹取单元,每个夹取单元包括前夹取臂和后夹取臂;前夹取臂包括前机械臂本体、旋转轴座、转向推杆、丝杠螺母座总成、失电制动器、减速齿轮组、机械臂闭合感应开关、机械臂打开感应开关;后夹取臂包含行星减速机、联轴器、丝杠螺母及导轨滑块总成、驱动座、驱动推杆、后机械臂本体、机械臂旋转轴座和机械臂旋转锁定机构;本发明汽车搬运机器人在交接区和停车区均无需建造特殊平台结构,便可完成车辆的托举和移动,从而达到最高的空间利用率;
基于Mecanum轮的全向移动机器人及其控制方法.pdf
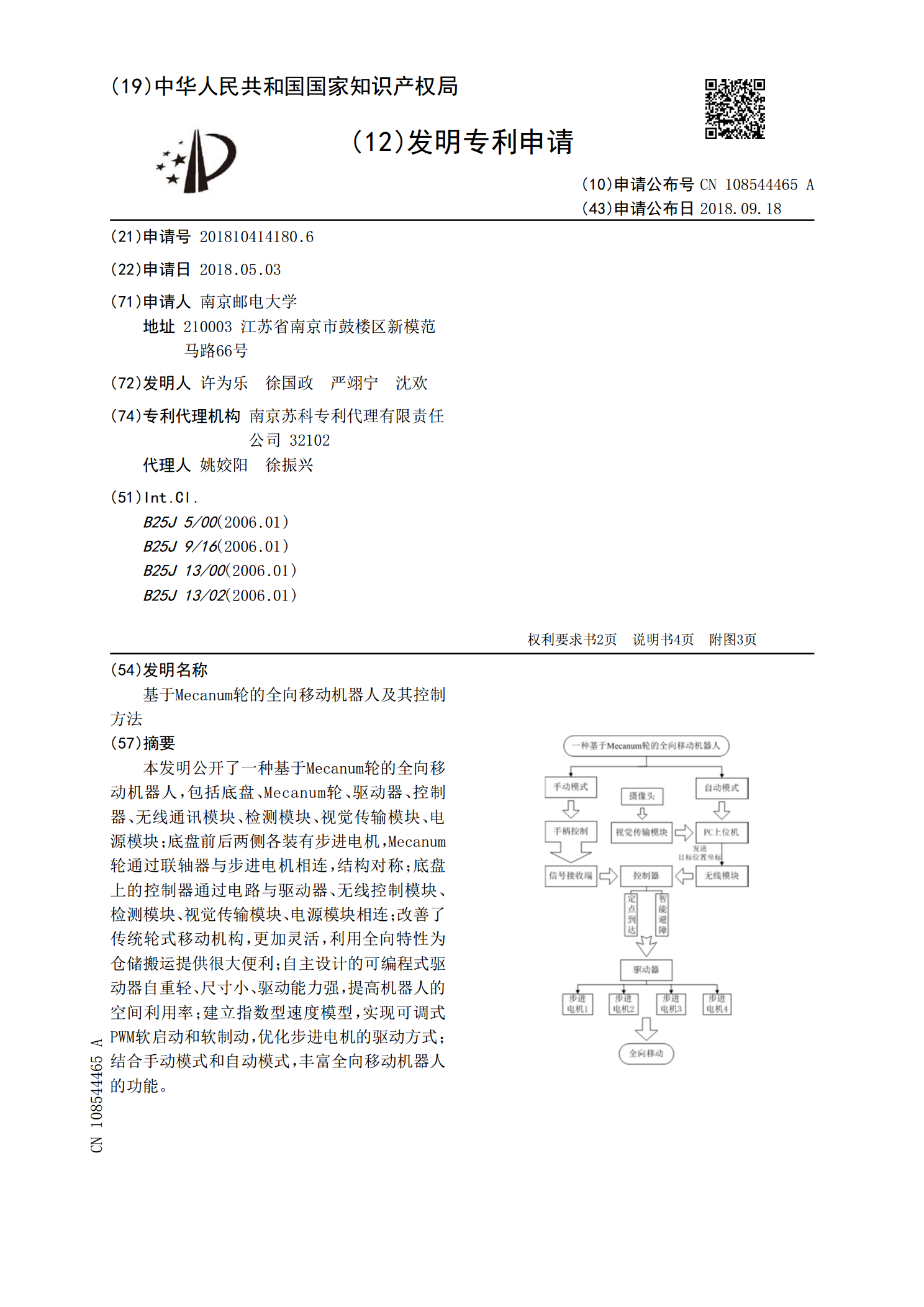
本发明公开了一种基于Mecanum轮的全向移动机器人,包括底盘、Mecanum轮、驱动器、控制器、无线通讯模块、检测模块、视觉传输模块、电源模块;底盘前后两侧各装有步进电机,Mecanum轮通过联轴器与步进电机相连,结构对称;底盘上的控制器通过电路与驱动器、无线控制模块、检测模块、视觉传输模块、电源模块相连;改善了传统轮式移动机构,更加灵活,利用全向特性为仓储搬运提供很大便利;自主设计的可编程式驱动器自重轻、尺寸小、驱动能力强,提高机器人的空间利用率;建立指数型速度模型,实现可调式PWM软启动和软制动,优
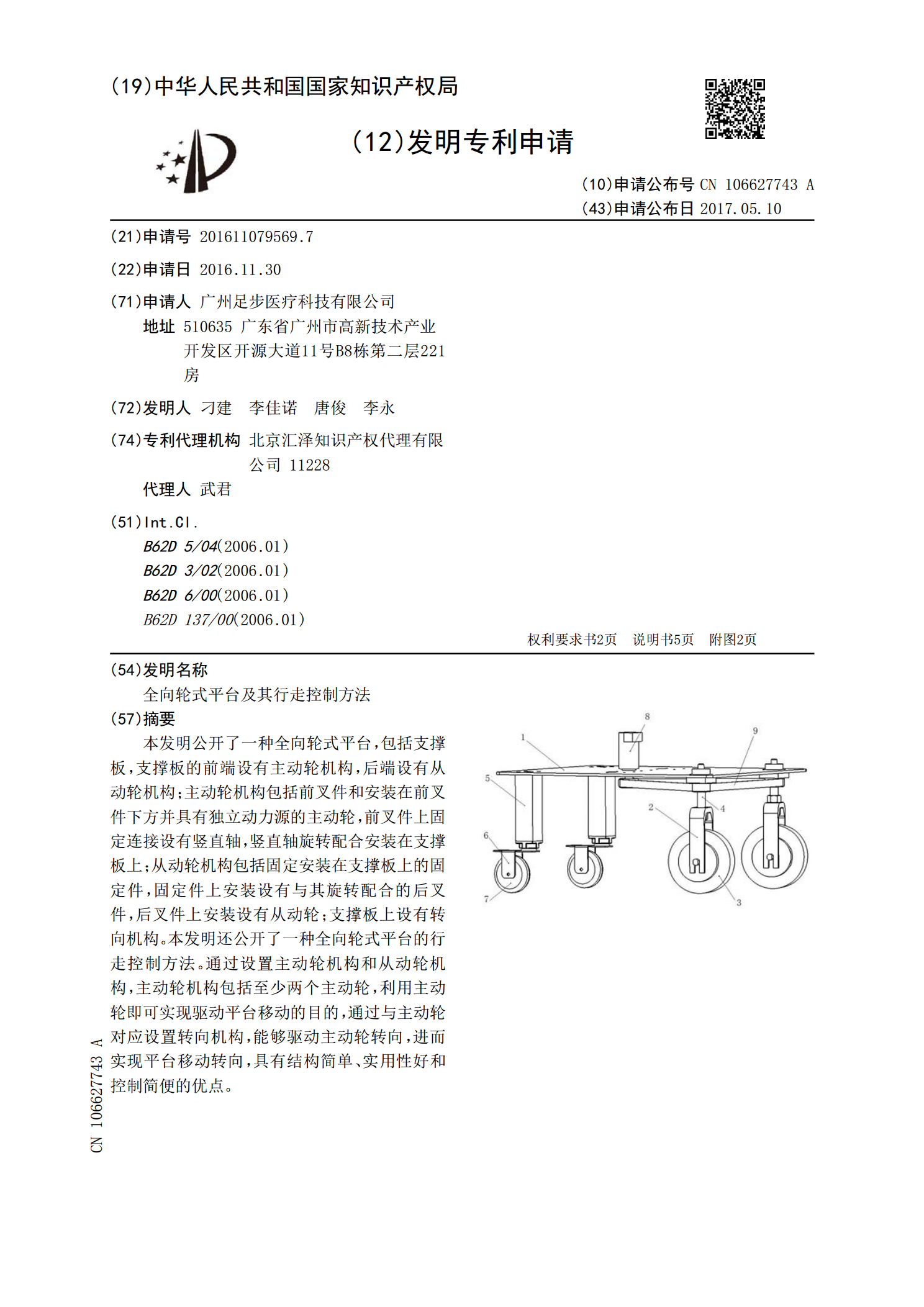
全向轮式平台及其行走控制方法.pdf
本发明公开了一种全向轮式平台,包括支撑板,支撑板的前端设有主动轮机构,后端设有从动轮机构;主动轮机构包括前叉件和安装在前叉件下方并具有独立动力源的主动轮,前叉件上固定连接设有竖直轴,竖直轴旋转配合安装在支撑板上;从动轮机构包括固定安装在支撑板上的固定件,固定件上安装设有与其旋转配合的后叉件,后叉件上安装设有从动轮;支撑板上设有转向机构。本发明还公开了一种全向轮式平台的行走控制方法。通过设置主动轮机构和从动轮机构,主动轮机构包括至少两个主动轮,利用主动轮即可实现驱动平台移动的目的,通过与主动轮对应设置转向机