
全向驱动泊车机器人.pdf

猫巷****奕声


1/10

2/10

3/10

4/10

5/10
6/10

7/10
8/10

9/10

10/10
亲,该文档总共16页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
全向驱动泊车机器人.pdf
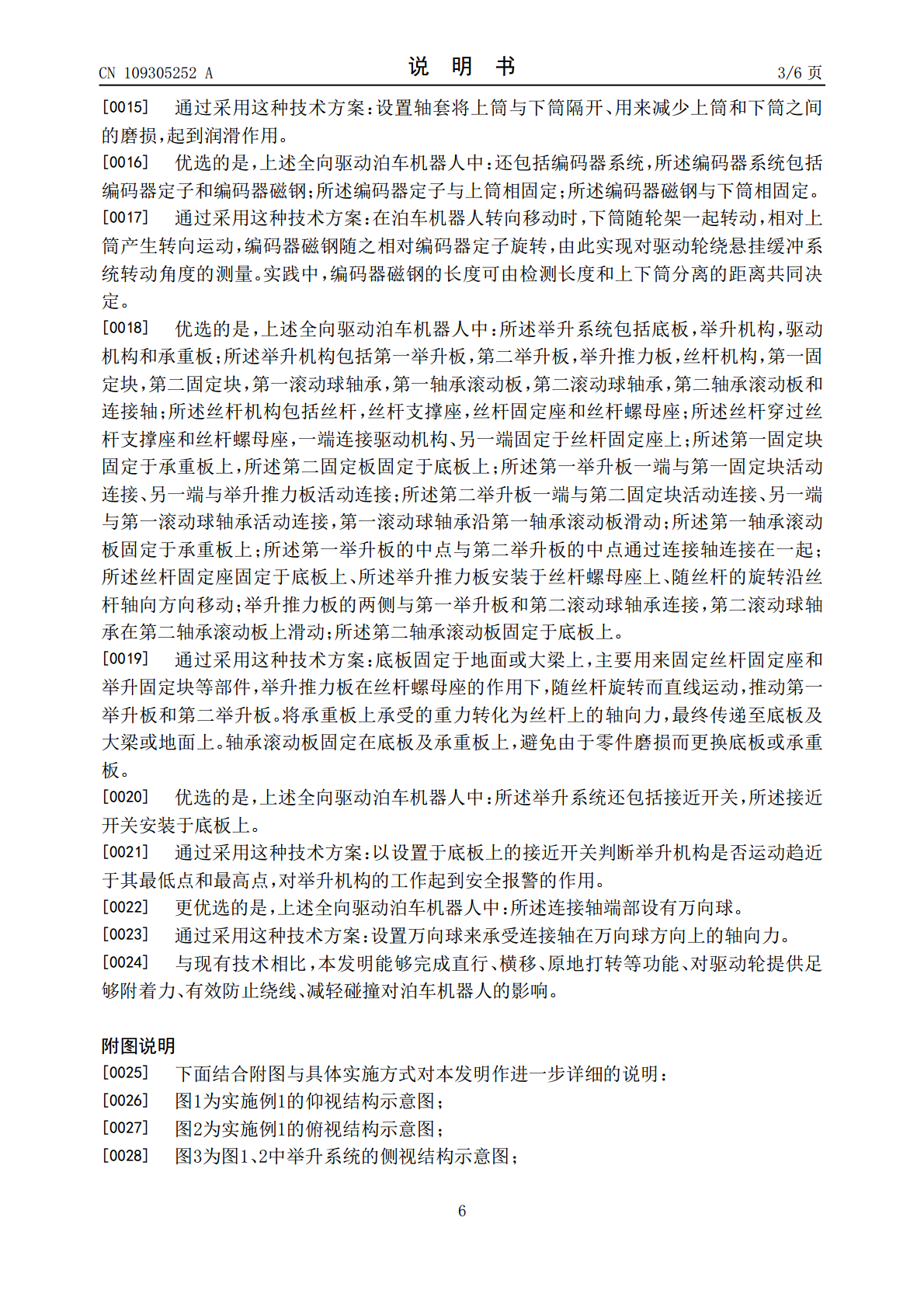
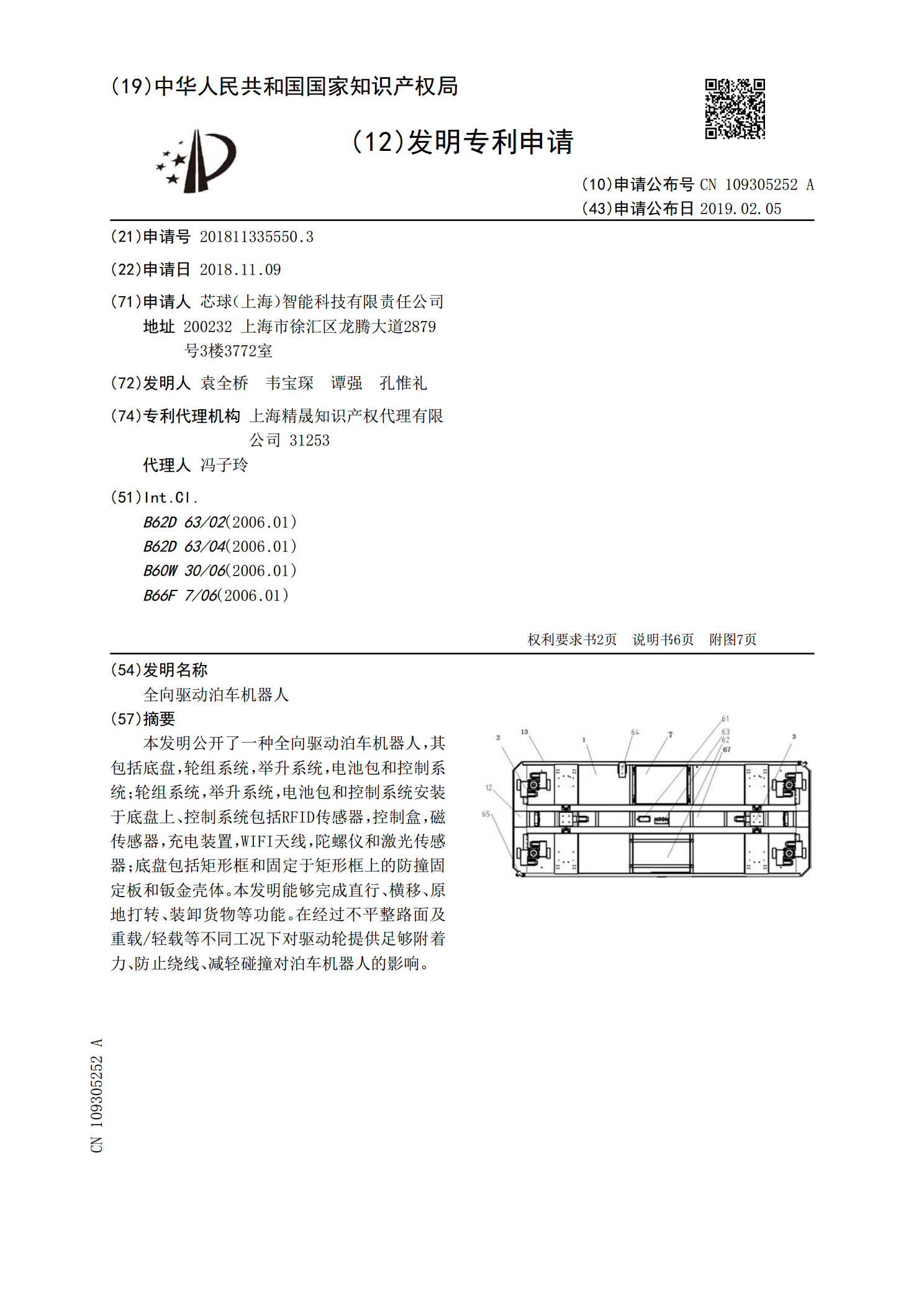
本发明公开了一种全向驱动泊车机器人,其包括底盘,轮组系统,举升系统,电池包和控制系统;轮组系统,举升系统,电池包和控制系统安装于底盘上、控制系统包括RFID传感器,控制盒,磁传感器,充电装置,WIFI天线,陀螺仪和激光传感器;底盘包括矩形框和固定于矩形框上的防撞固定板和钣金壳体。本发明能够完成直行、横移、原地打转、装卸货物等功能。在经过不平整路面及重载/轻载等不同工况下对驱动轮提供足够附着力、防止绕线、减轻碰撞对泊车机器人的影响。
泊车机器人超薄全向轮组.pdf
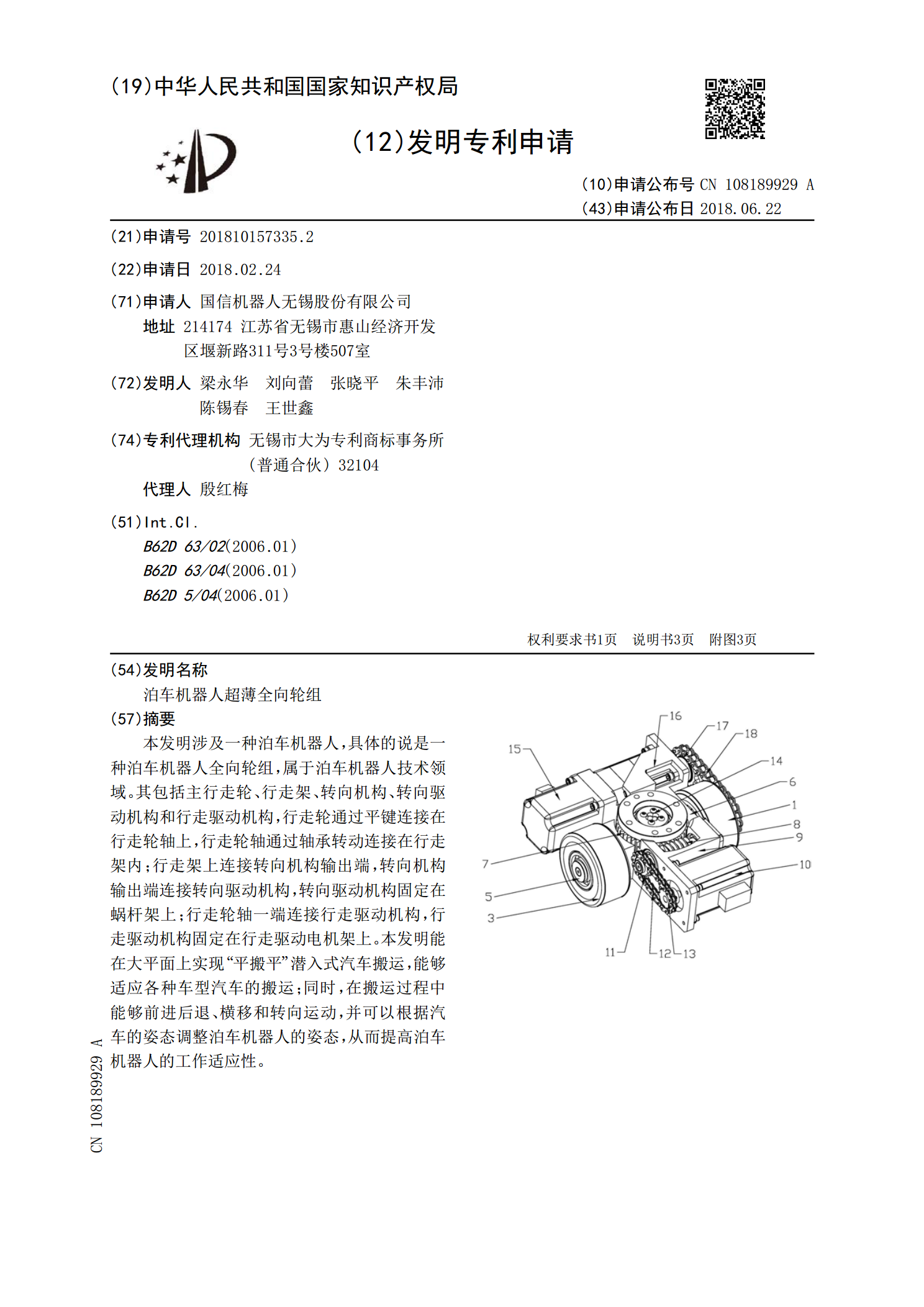
本发明涉及一种泊车机器人,具体的说是一种泊车机器人全向轮组,属于泊车机器人技术领域。其包括主行走轮、行走架、转向机构、转向驱动机构和行走驱动机构,行走轮通过平键连接在行走轮轴上,行走轮轴通过轴承转动连接在行走架内;行走架上连接转向机构输出端,转向机构输出端连接转向驱动机构,转向驱动机构固定在蜗杆架上;行走轮轴一端连接行走驱动机构,行走驱动机构固定在行走驱动电机架上。本发明能在大平面上实现“平搬平”潜入式汽车搬运,能够适应各种车型汽车的搬运;同时,在搬运过程中能够前进后退、横移和转向运动,并可以根据汽车的姿
智能全向移载平台泊车机器人及其控制方法.pdf
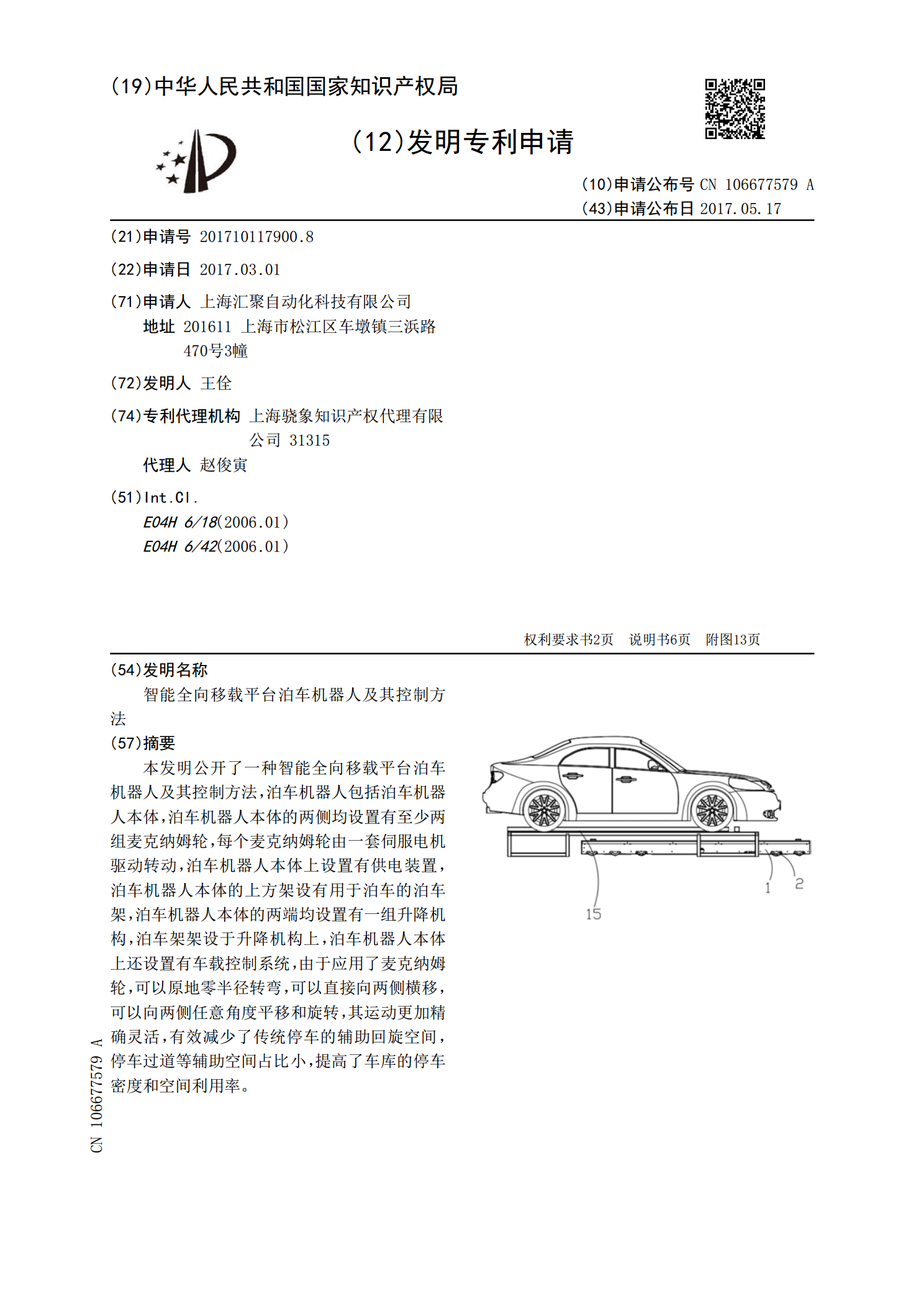
本发明公开了一种智能全向移载平台泊车机器人及其控制方法,泊车机器人包括泊车机器人本体,泊车机器人本体的两侧均设置有至少两组麦克纳姆轮,每个麦克纳姆轮由一套伺服电机驱动转动,泊车机器人本体上设置有供电装置,泊车机器人本体的上方架设有用于泊车的泊车架,泊车机器人本体的两端均设置有一组升降机构,泊车架架设于升降机构上,泊车机器人本体上还设置有车载控制系统,由于应用了麦克纳姆轮,可以原地零半径转弯,可以直接向两侧横移,可以向两侧任意角度平移和旋转,其运动更加精确灵活,有效减少了传统停车的辅助回旋空间,停车过道等辅

一种机器人全向驱动装置.pdf
本发明公开了一种机器人全向驱动装置,涉及机器人技术领域,包括底盘以及设置在底盘上的三组行走驱动装置,关键在于:所述行走驱动装置包括连接板、固定在连接板上的驱动电机、与驱动电机的输出轴相连的全向轮,所述连接板的一端与底盘铰接、另一端借助减震装置与底盘相连;所述减震装置包括铰接在连接板上的弹簧套筒、铰接在底盘上的连接块、套装在弹簧套筒上并且两端分别被弹簧套筒和连接块限位的压簧以及穿过弹簧套筒与连接块螺纹连接的连接轴。本发明通过设计减震可调的减震装置,即使在路面凹凸不平的情况下,全向驱动装置依然可以保证机器人顺

全向轮驱动的机器人腕关节机构.pdf
本发明公开了一种全向轮驱动的机器人腕关节机构,包括球关节,所述球关节的下半球体置于球关节杯形架内并与球关节杯形架内圆周均布的三个单排全向轮摩擦接触,三个单排全向轮通过对应的轮架安装且三个单排全向轮的回转中心线斜向下方并相交于一点,该相交点处于球关节球心的正下方,各轮架上设有驱动对应单排全向轮的球关节电机和检测对应单排全向轮转角的编码器,所述球关节杯形架上设有作用在球关节上半球体上的防脱组件,球关节上半球体上设有供作业机具安装的平台座。本发明可调整和改变机械抓手在三维空间内的位置和姿态,运动平稳、转向灵活,