
一种自动化停车库用智能全向移载平台泊车系统及方法.pdf

静芙****可爱


1/10
2/10

3/10
4/10

5/10
6/10

7/10
8/10

9/10

10/10
亲,该文档总共14页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种自动化停车库用智能全向移载平台泊车系统及方法.pdf
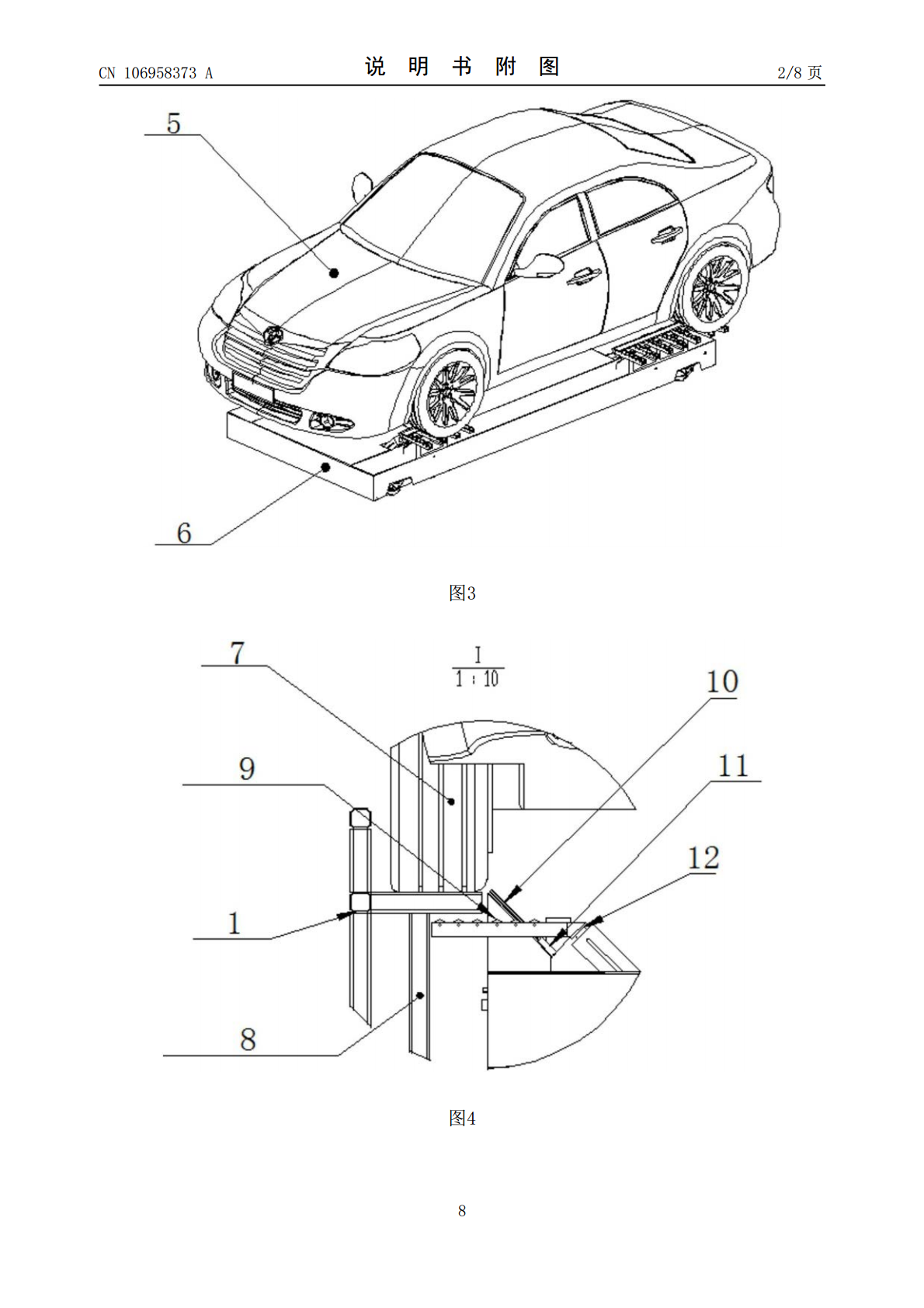
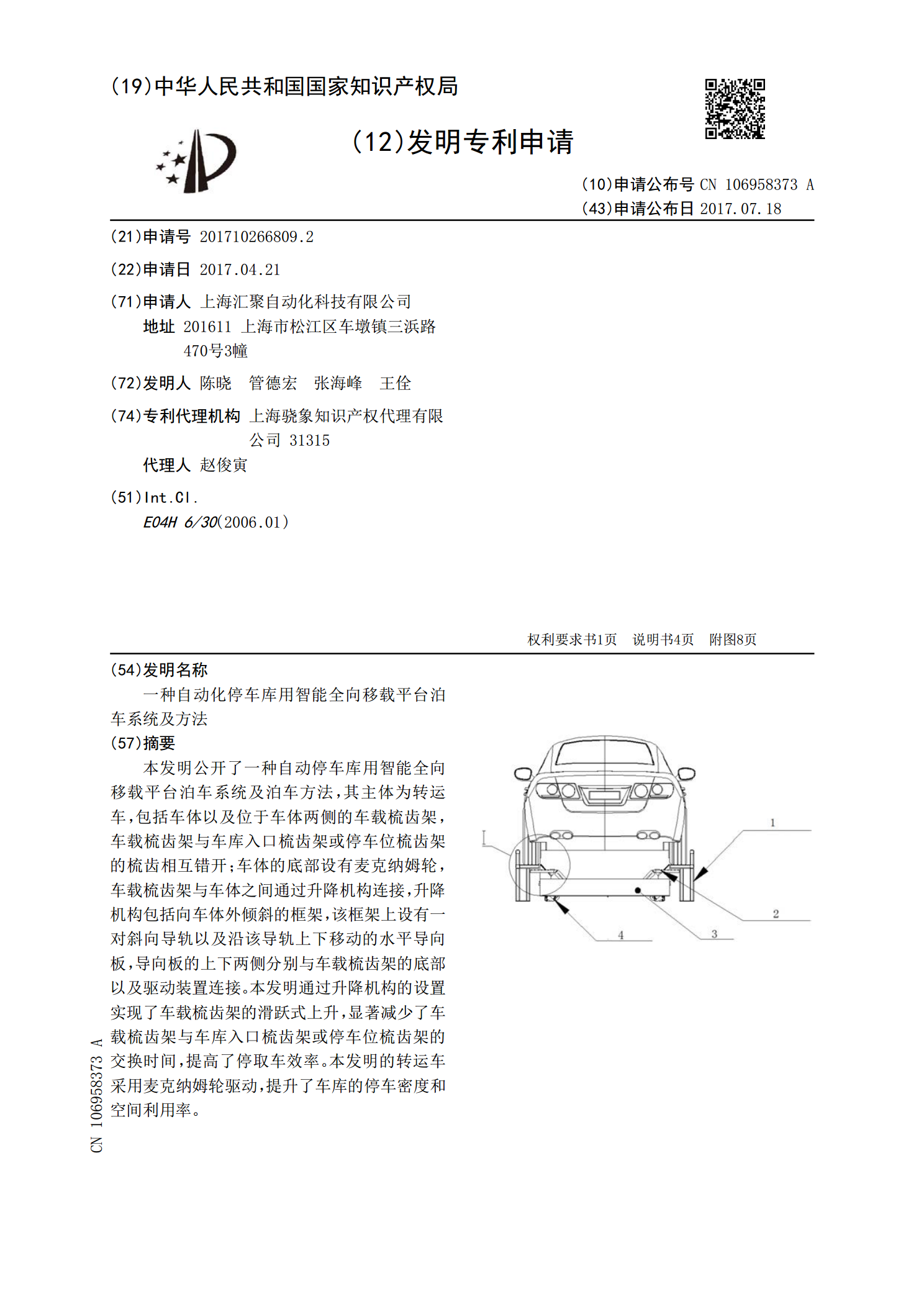
本发明公开了一种自动停车库用智能全向移载平台泊车系统及泊车方法,其主体为转运车,包括车体以及位于车体两侧的车载梳齿架,车载梳齿架与车库入口梳齿架或停车位梳齿架的梳齿相互错开;车体的底部设有麦克纳姆轮,车载梳齿架与车体之间通过升降机构连接,升降机构包括向车体外倾斜的框架,该框架上设有一对斜向导轨以及沿该导轨上下移动的水平导向板,导向板的上下两侧分别与车载梳齿架的底部以及驱动装置连接。本发明通过升降机构的设置实现了车载梳齿架的滑跃式上升,显著减少了车载梳齿架与车库入口梳齿架或停车位梳齿架的交换时间,提高了停取
智能全向移载平台泊车机器人及其控制方法.pdf
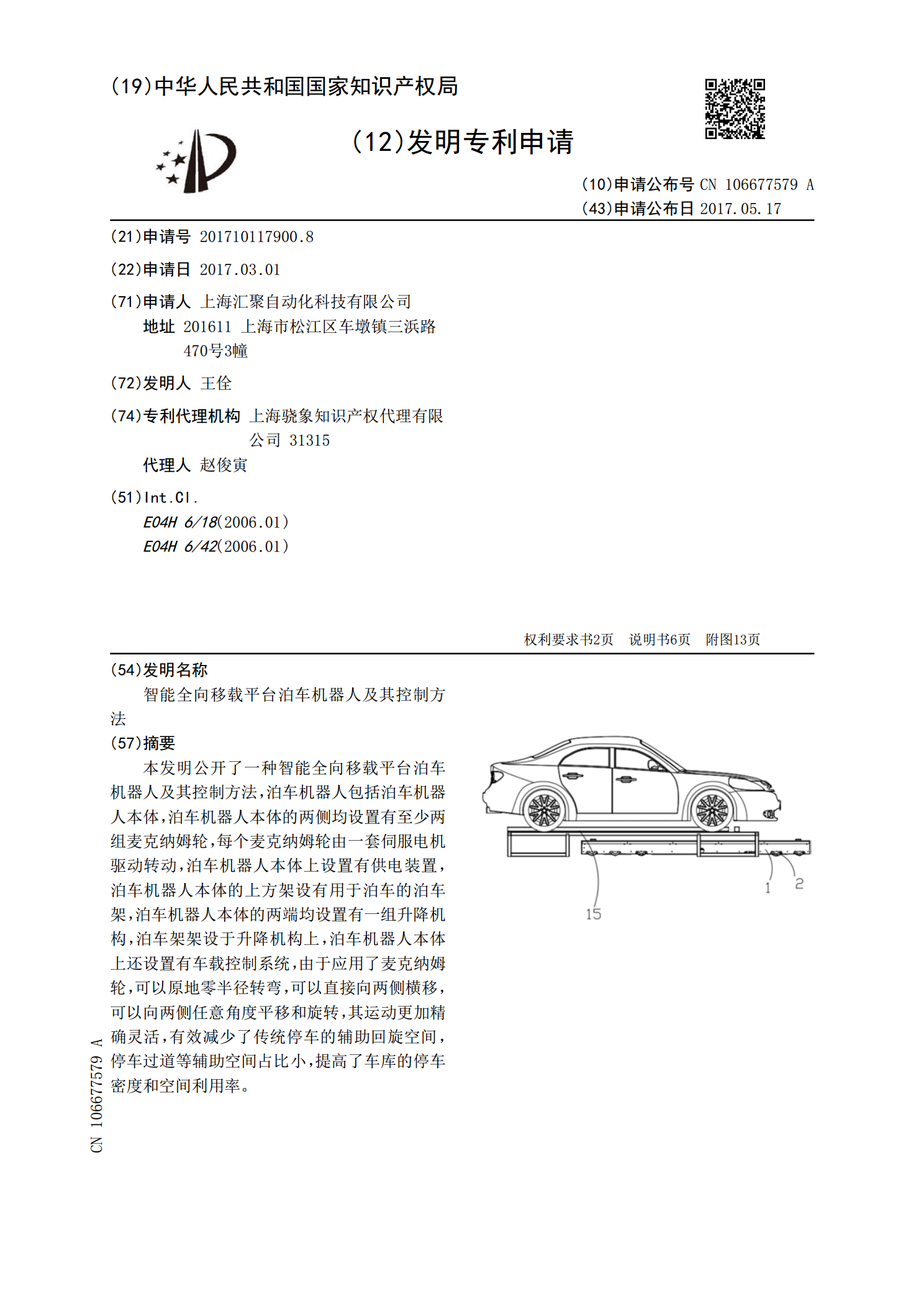
本发明公开了一种智能全向移载平台泊车机器人及其控制方法,泊车机器人包括泊车机器人本体,泊车机器人本体的两侧均设置有至少两组麦克纳姆轮,每个麦克纳姆轮由一套伺服电机驱动转动,泊车机器人本体上设置有供电装置,泊车机器人本体的上方架设有用于泊车的泊车架,泊车机器人本体的两端均设置有一组升降机构,泊车架架设于升降机构上,泊车机器人本体上还设置有车载控制系统,由于应用了麦克纳姆轮,可以原地零半径转弯,可以直接向两侧横移,可以向两侧任意角度平移和旋转,其运动更加精确灵活,有效减少了传统停车的辅助回旋空间,停车过道等辅

一种仓储用移载平台.pdf
本发明属于仓储技术领域,特别涉及一种仓储用移载平台。包括平台结构框架、驱动电机、驱动齿轮、滑触线、齿条、载重万向轮及集电器,其中平台结构框架为方形体结构,其一相邻两侧面均设有驱动齿轮和滑触线,或均设有驱动齿轮和集电器,另一相邻两个侧面均设有齿条和集电器,或均设有齿条和滑触线,各驱动齿轮分别与一驱动电机连接,平台结构框架的底部设有多个载重万向轮。本发明相对于现有其它形式移载平台具有承重能力强、结构形式简单、可靠性高、制造成本低、实用性强等特点。

一种智能全向输转平台高速全向轮系统.pdf
一种智能全向输转平台高速全向轮系统,包括:大齿轮,所述大齿轮与车架连接;小齿轮,所述小齿轮固定安装在转向支撑架上,所述小齿轮与大齿轮啮合;尼龙齿轮,所述尼龙齿轮安装在转向支撑架上,所述尼龙齿轮与大齿轮无间隙啮合;车轮架,所述转向支撑架和车轮架连接,所述车轮架下部安装外轮圈。本发明安装结构紧凑,安装简单,占用空间小;高速重载下,雨雪天,不平整路面能正常行驶;制动效果好,大大减小了急刹下制动距离;行驶和转向都可以实现高精度,是普通车辆不能达到的。

工件移载方法及工件移载系统.pdf
本发明目的在于提供一种能够以简单的构成稳定地移载工件的工件移载方法及工件移载系统。具体而言,工件移载系统(100)具备:2个工件保持部件(110)、(115),将工件保持成在铅垂方向上可插拔;拾取装置(120),具备可进行开闭动作的爪部件(128);及临时放置用工件保持部件(150)。工件移载方法为,通过拾取装置(120)来把持保持在一方的工件保持部件(110)上的工件,并移载到临时放置用工件保持部件(150)上,在能够以稳定姿态保持工件的把持位置上重新把持工件后,将工件从临时放置用工件保持部件(150)