
智能泊车系统及其控制方法.pdf

一吃****瀚文

1/9

2/9
3/9
4/9
5/9
6/9
7/9
8/9
9/9
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
智能泊车系统及其控制方法.pdf
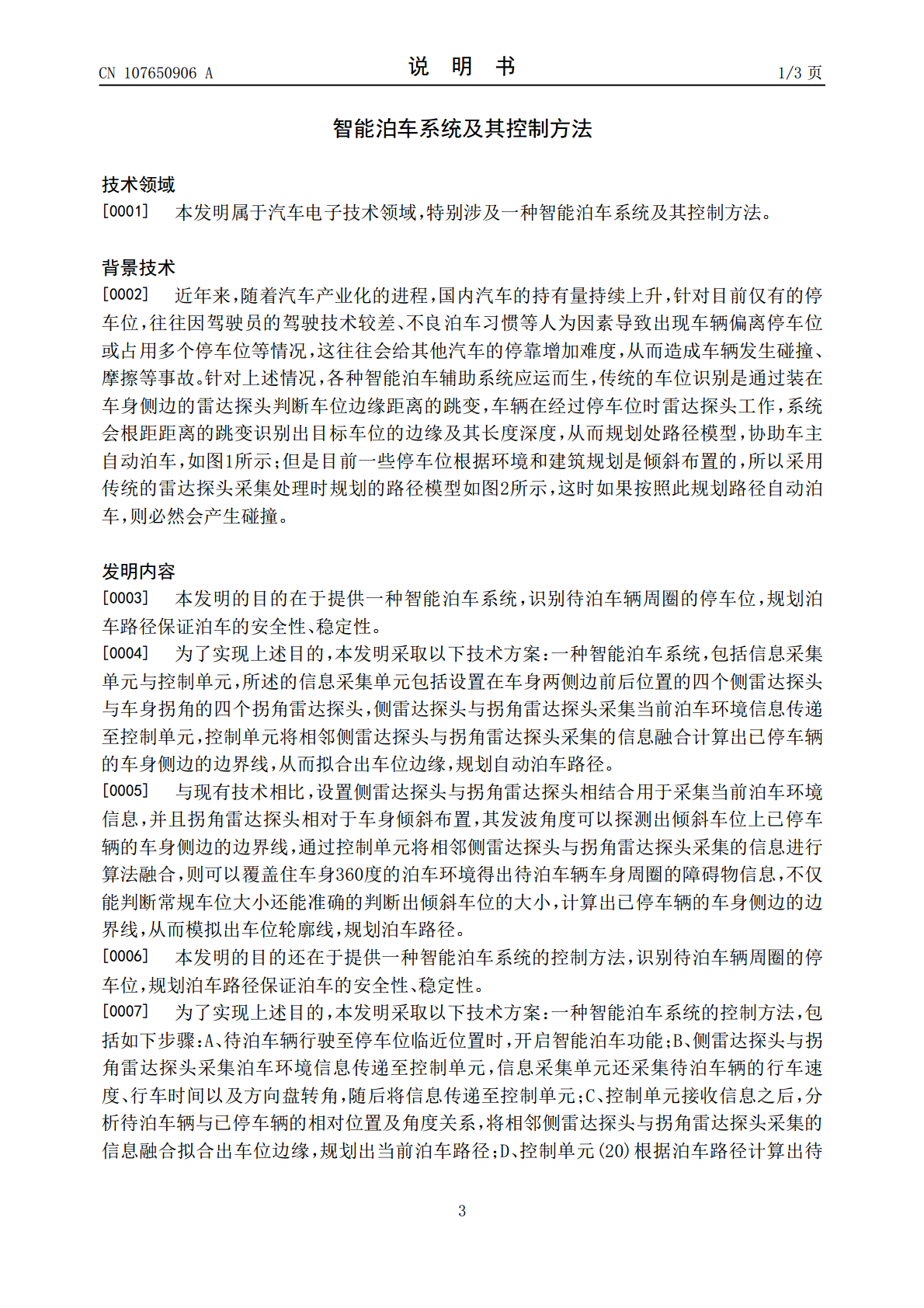
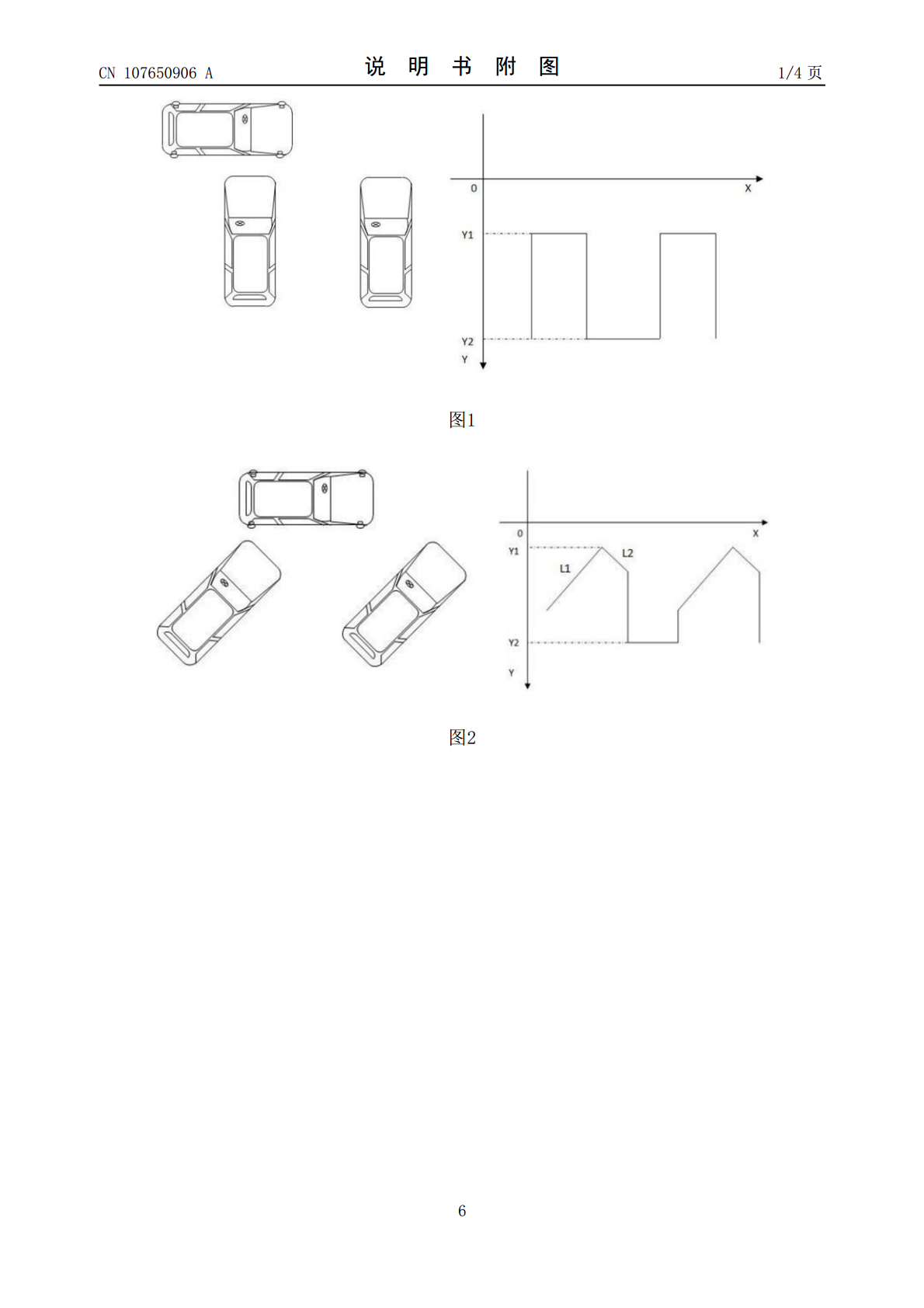
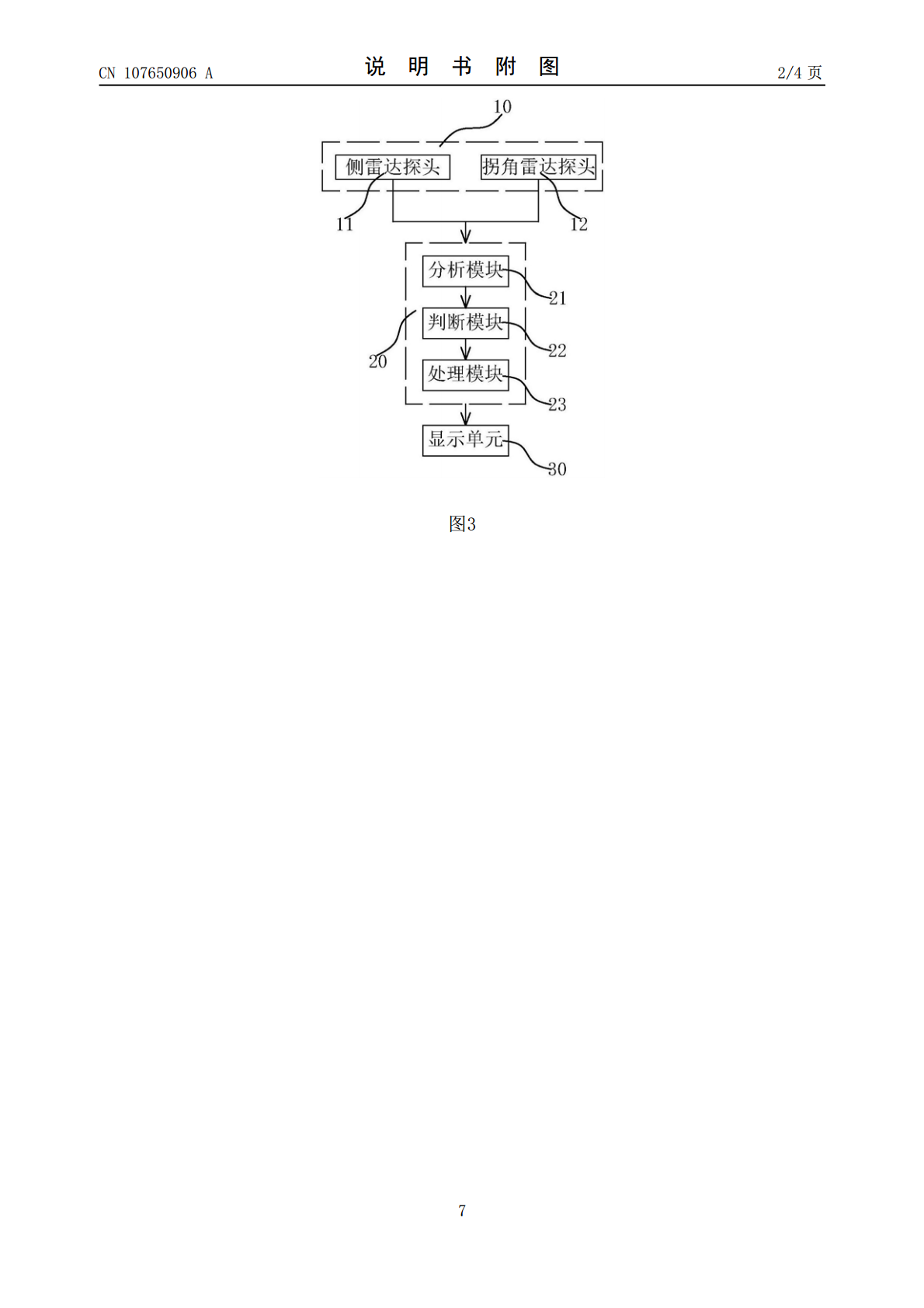
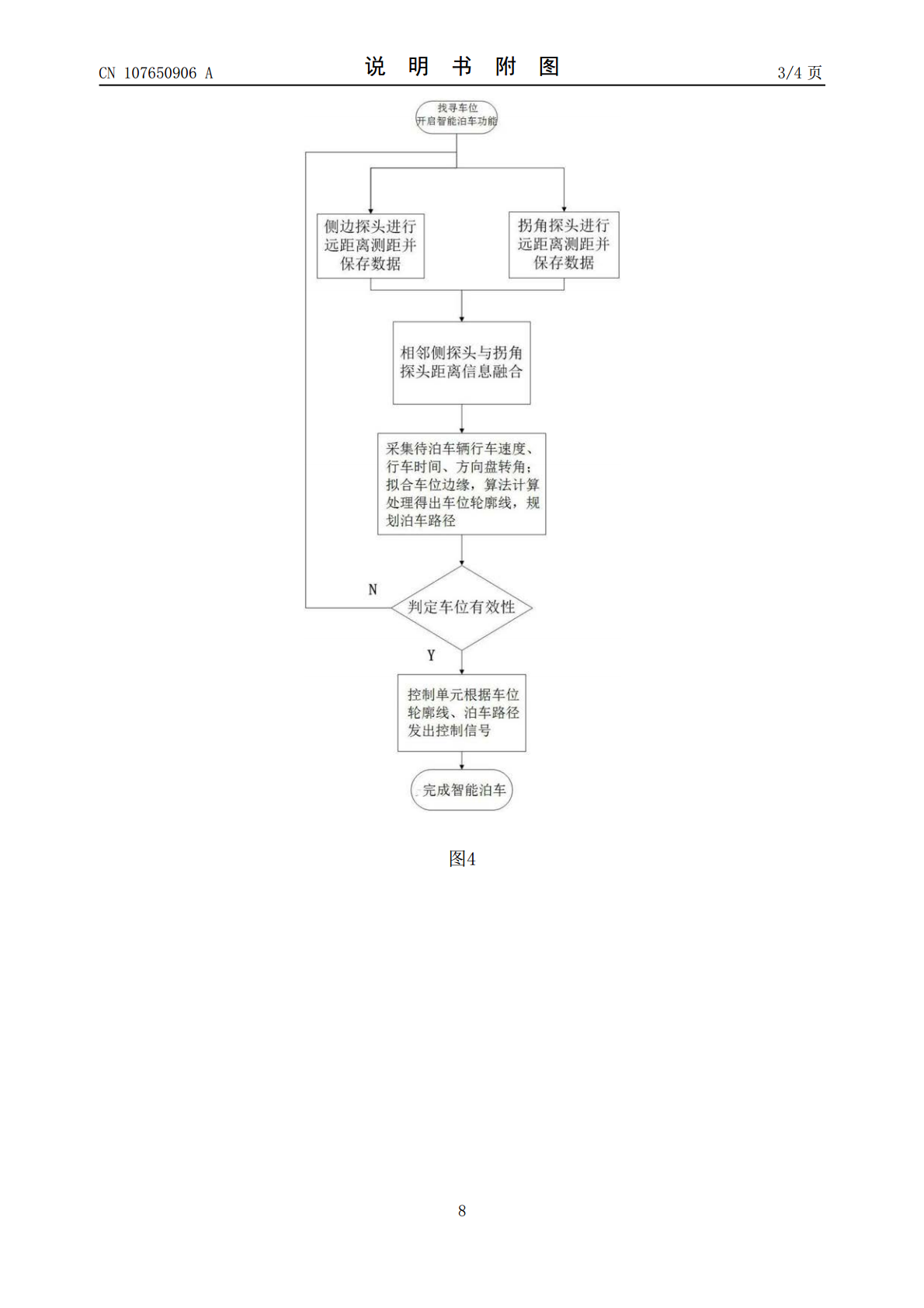
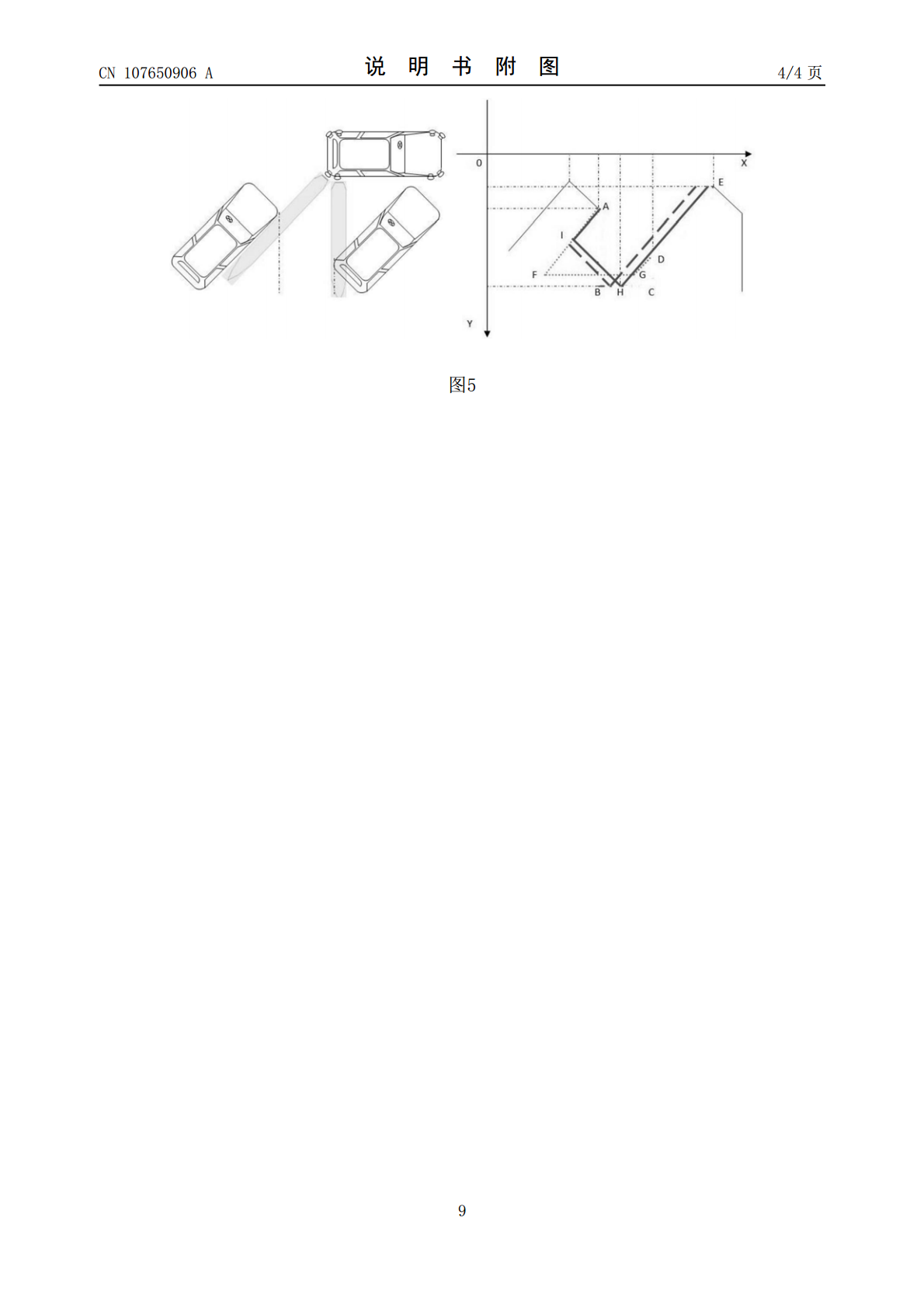
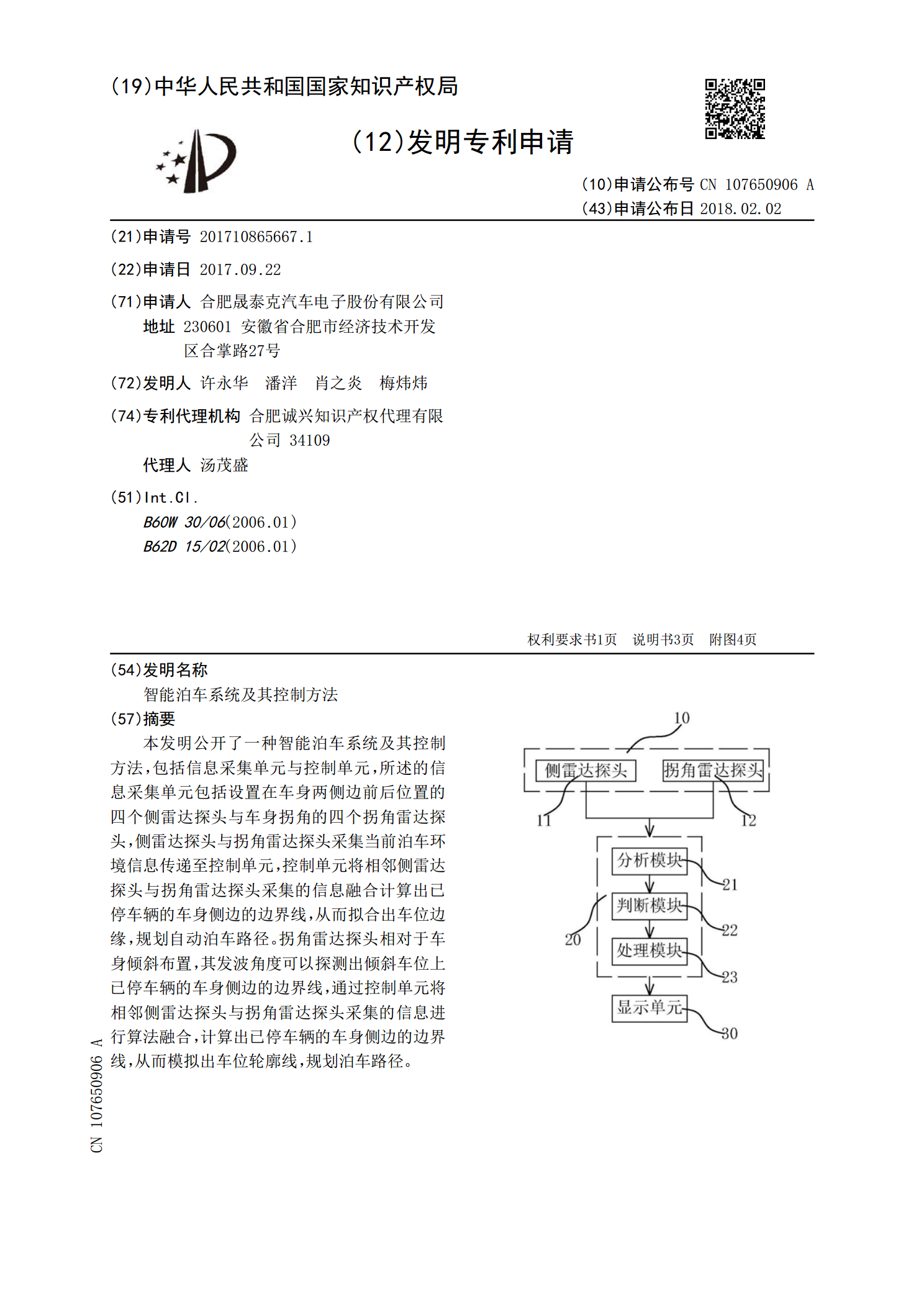
本发明公开了一种智能泊车系统及其控制方法,包括信息采集单元与控制单元,所述的信息采集单元包括设置在车身两侧边前后位置的四个侧雷达探头与车身拐角的四个拐角雷达探头,侧雷达探头与拐角雷达探头采集当前泊车环境信息传递至控制单元,控制单元将相邻侧雷达探头与拐角雷达探头采集的信息融合计算出已停车辆的车身侧边的边界线,从而拟合出车位边缘,规划自动泊车路径。拐角雷达探头相对于车身倾斜布置,其发波角度可以探测出倾斜车位上已停车辆的车身侧边的边界线,通过控制单元将相邻侧雷达探头与拐角雷达探头采集的信息进行算法融合,计算出已

一种辅助泊车系统及其控制方法.pdf
本发明揭示了一种辅助泊车系统及其控制方法,系统设有泊车控制器,通过CAN总线获得方向盘转角传感器、制动控制器和电喷控制器的信号,通过串行接口获得后雷达控制器和前雷达控制器的信号,通过线束获得侧面超声波传感器和轮速传感器信号,并通过线束与泊车模式选择按钮连接,所述的泊车控制器由泊车模式选择按钮控制启动处理获得的信号,并输出命令至泊车控制器内部的蜂鸣器、语音装置以及显示器辅助驾驶员泊车。该系统利用的信号大都来自于车辆原有资源,节约了成本,泊车控制方式可根据需要自助选择,辅助泊车的控制方法也简单合理,即能减小控

泊车控制装置与系统以及泊车控制方法.pdf
本发明公开了一种泊车控制装置与系统以及泊车控制方法,以解决现有技术中泊车控制时车辆运行轨迹与设计轨迹之间存在较大误差的问题。本发明的泊车控制装置包括:获取模块,用于获取车辆的起点位置和终点位置;计算模块,用于根据约束条件和所述起点位置和终点位置计算预设车速下的泊车轨迹,其中,所述约束条件包括泊车时车辆最高允许车速、车辆前轮最大转向速度和车辆前轮的最大转角,所述泊车轨迹曲率连续变化,其中包含圆弧以及与圆弧两端连接的曲线,所述圆弧的半径为车辆在前轮到达最大转角时的转弯半径。应用本发明的技术方案,有助于使泊车时
一种车辆泊车方法及其泊车系统.pdf
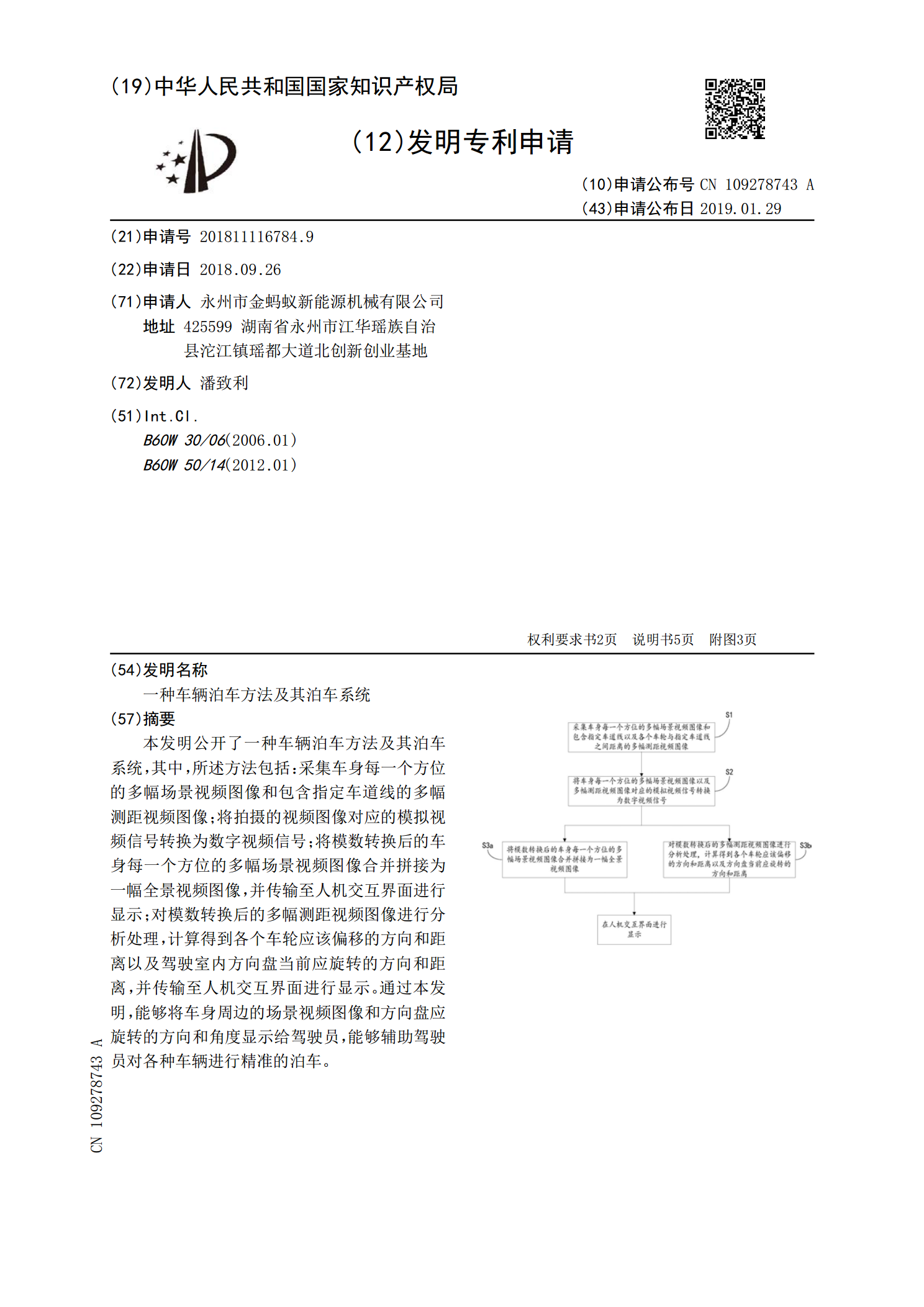
本发明公开了一种车辆泊车方法及其泊车系统,其中,所述方法包括:采集车身每一个方位的多幅场景视频图像和包含指定车道线的多幅测距视频图像;将拍摄的视频图像对应的模拟视频信号转换为数字视频信号;将模数转换后的车身每一个方位的多幅场景视频图像合并拼接为一幅全景视频图像,并传输至人机交互界面进行显示;对模数转换后的多幅测距视频图像进行分析处理,计算得到各个车轮应该偏移的方向和距离以及驾驶室内方向盘当前应旋转的方向和距离,并传输至人机交互界面进行显示。通过本发明,能够将车身周边的场景视频图像和方向盘应旋转的方向和角度
一种智能立体车库系统及其实现智能泊车的方法.pdf
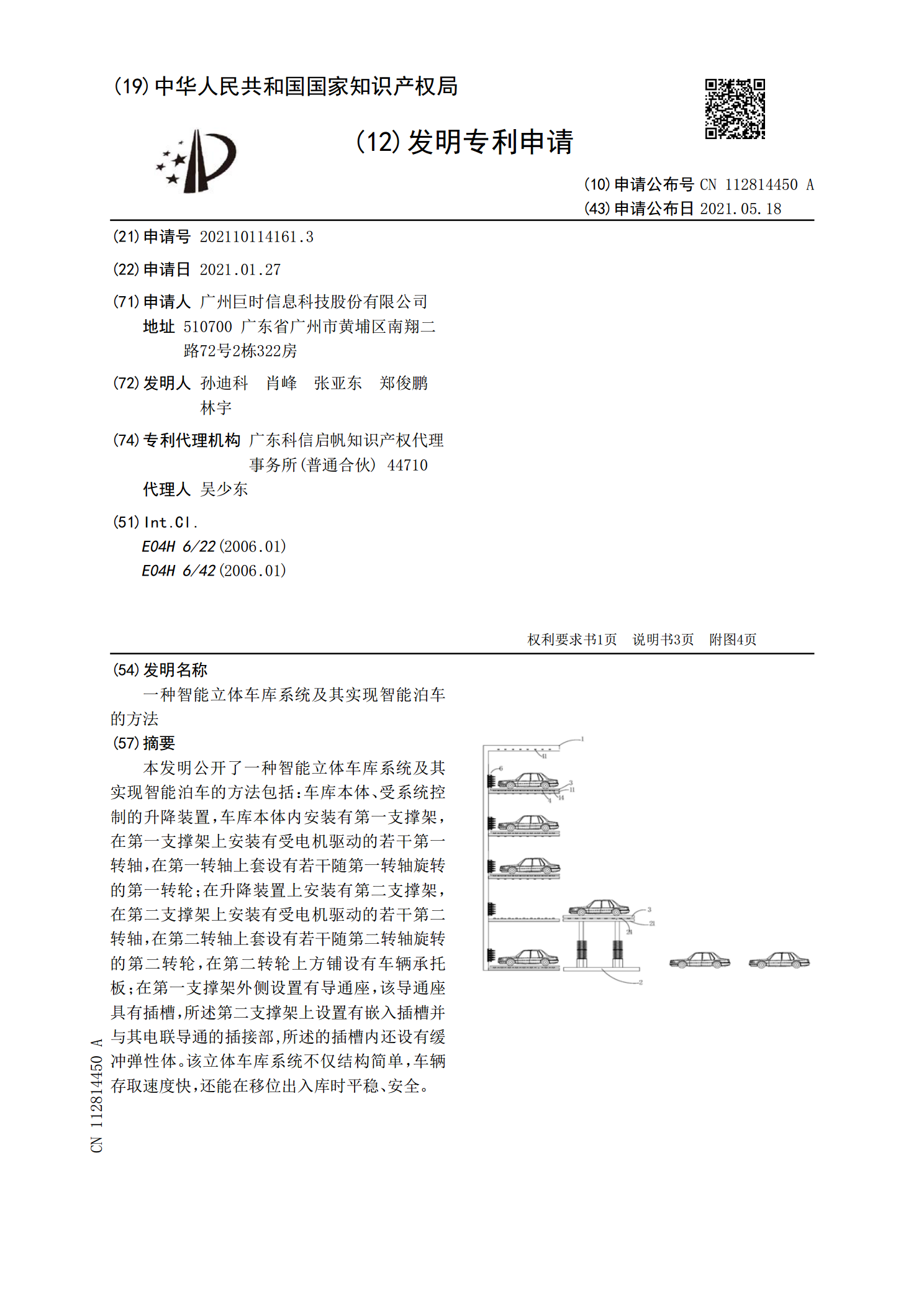
本发明公开了一种智能立体车库系统及其实现智能泊车的方法包括:车库本体、受系统控制的升降装置,车库本体内安装有第一支撑架,在第一支撑架上安装有受电机驱动的若干第一转轴,在第一转轴上套设有若干随第一转轴旋转的第一转轮;在升降装置上安装有第二支撑架,在第二支撑架上安装有受电机驱动的若干第二转轴,在第二转轴上套设有若干随第二转轴旋转的第二转轮,在第二转轮上方铺设有车辆承托板;在第一支撑架外侧设置有导通座,该导通座具有插槽,所述第二支撑架上设置有嵌入插槽并与其电联导通的插接部,所述的插槽内还设有缓冲弹性体。该立体车