
越障巡检机器人.pdf

新月****姐a

1/7
2/7
3/7
4/7
5/7
6/7
7/7
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

越障巡检机器人.pdf
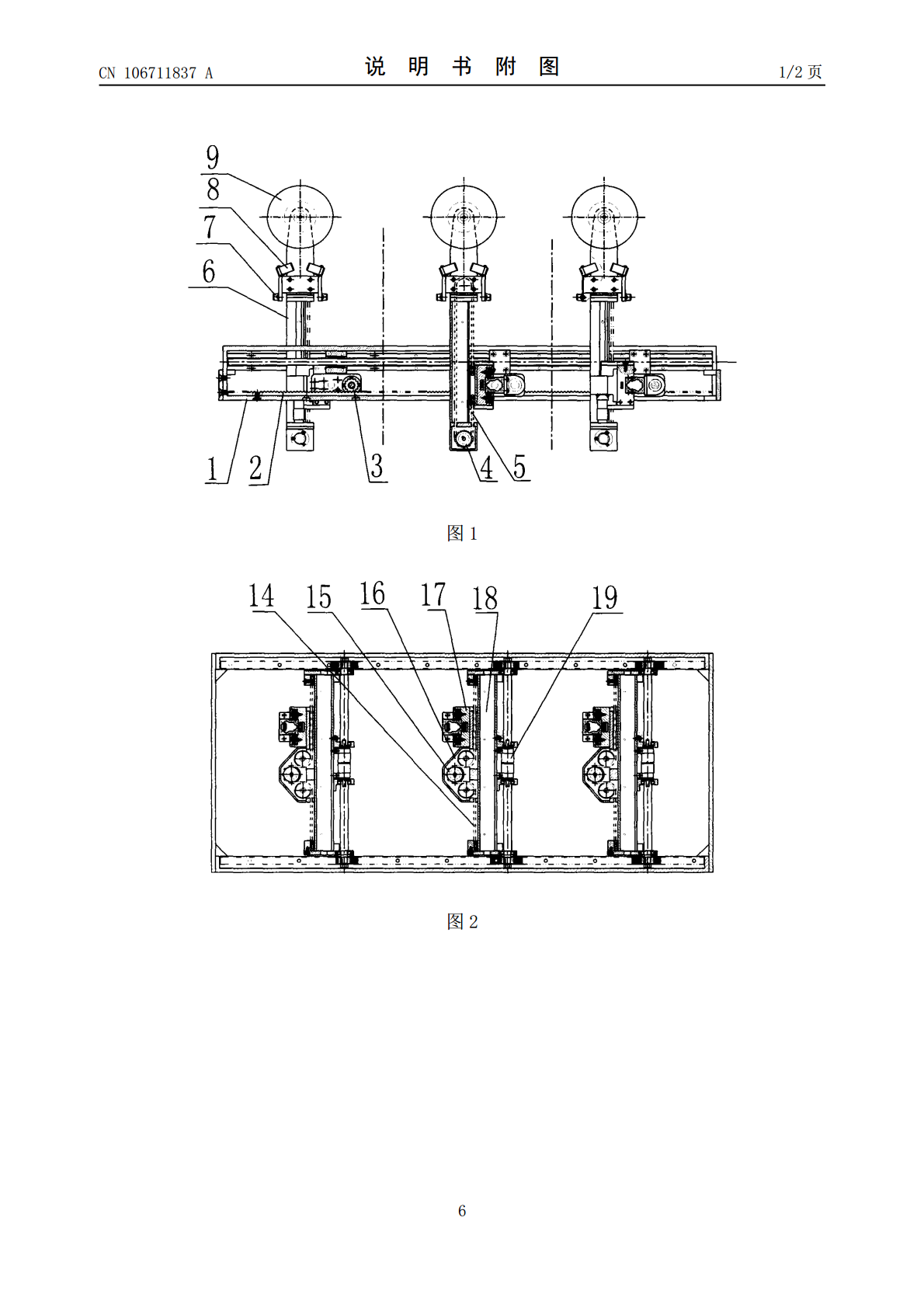
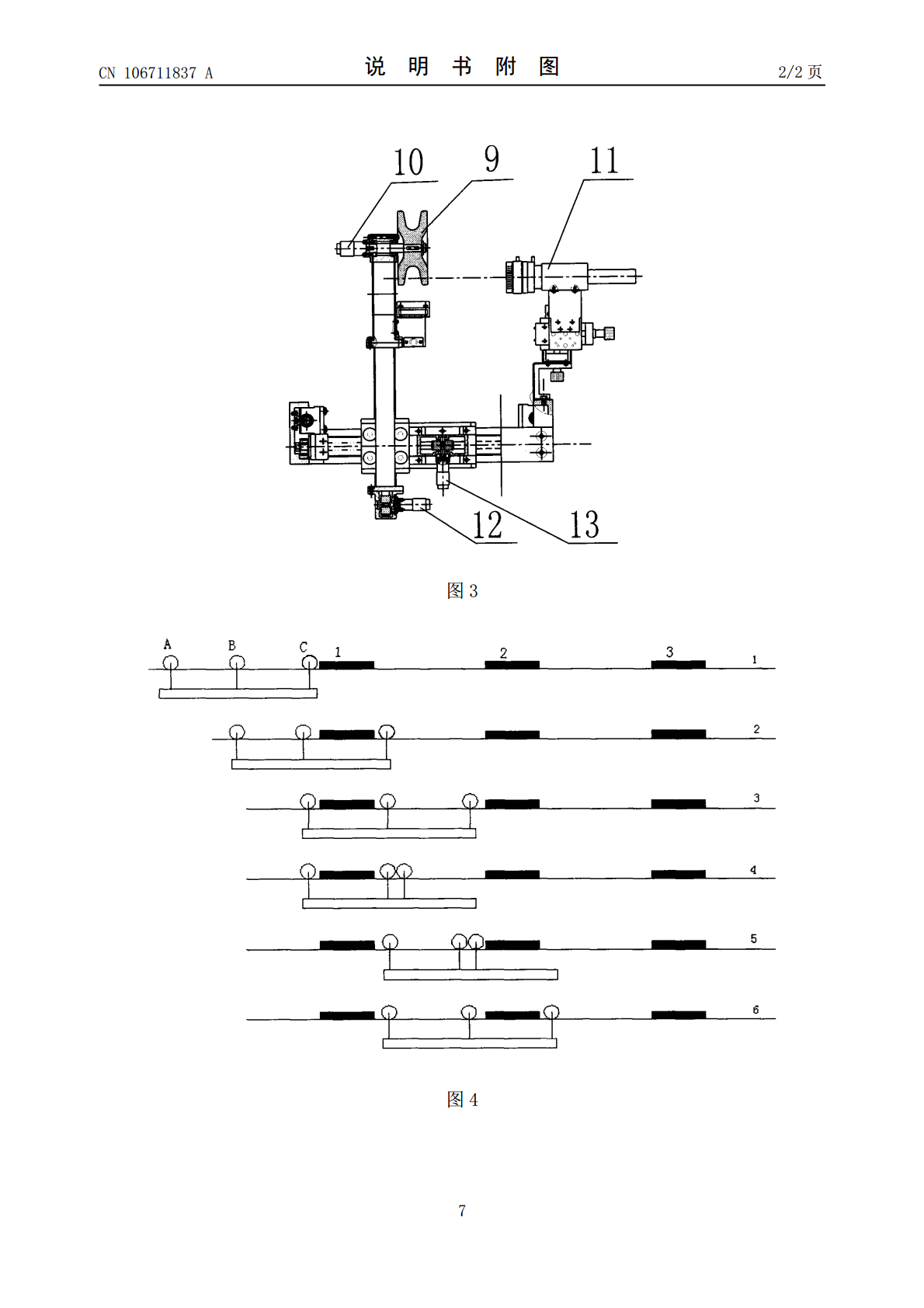
本发明公开了一种越障巡检机器人,包括车架,车架上设有至少3条悬挂臂,所述每条悬挂臂的上端分别设有滚动轮,每条悬挂臂与车架之间分别设有纵向移动装置、横向移动装置和升降装置,并分别由纵向驱动电机、横向驱动电机和升降驱动电机驱动,悬挂臂上设有光电传感器和接触传感器。每条悬挂臂可相对于车架单独上下、前后、左右移动,当遇到障碍物时,悬挂臂可单独进行三维移动,依次越过障碍物,进而使整个越障巡检机器人跨越障碍物。实现安全、平稳、可靠越障,对输电线路进行巡检。提高了检测效率,能够有效的保证电网安全运行。主要应用于超高压架
具有越障功能的智能巡检机器人.pdf
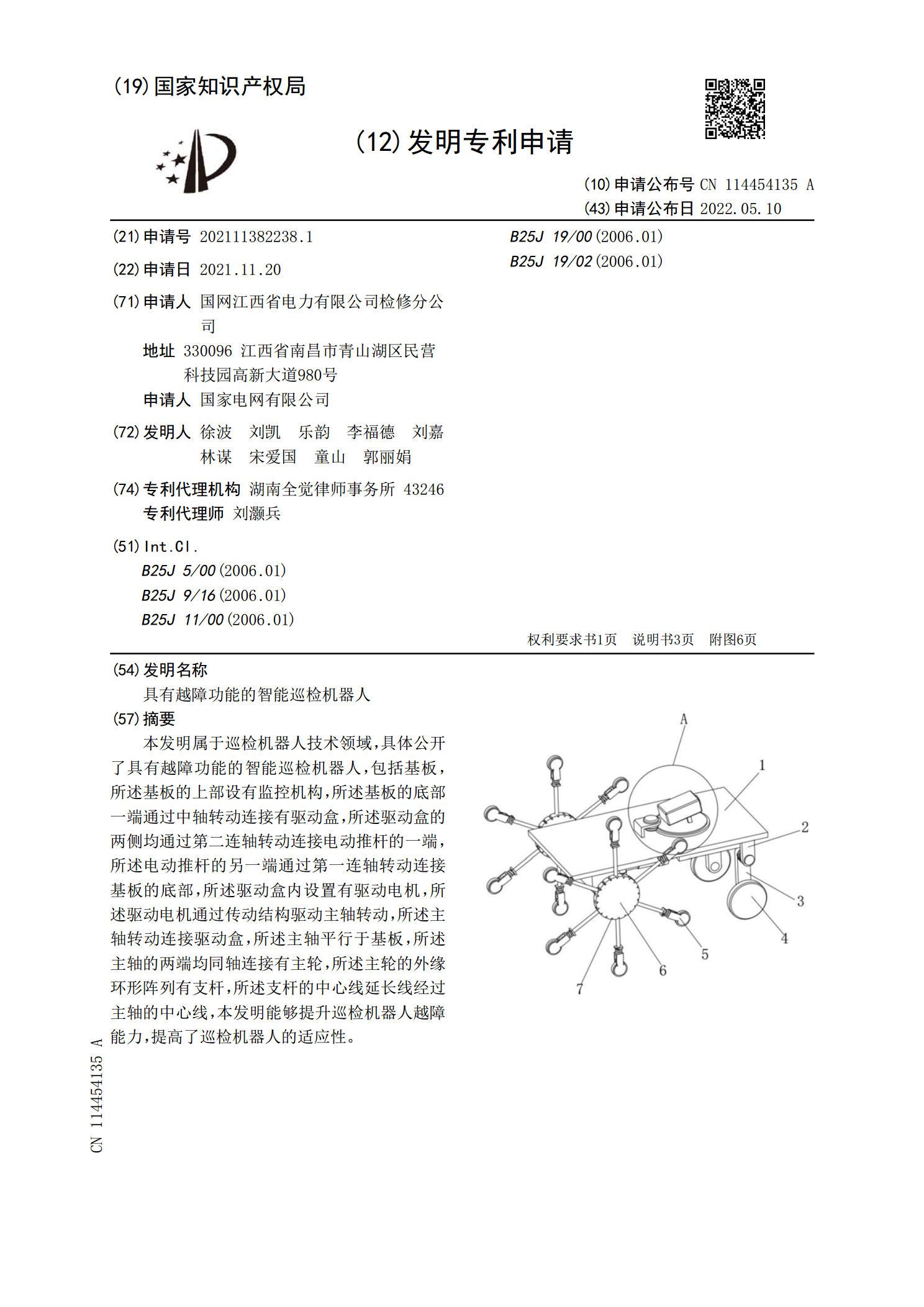
本发明属于巡检机器人技术领域,具体公开了具有越障功能的智能巡检机器人,包括基板,所述基板的上部设有监控机构,所述基板的底部一端通过中轴转动连接有驱动盒,所述驱动盒的两侧均通过第二连轴转动连接电动推杆的一端,所述电动推杆的另一端通过第一连轴转动连接基板的底部,所述驱动盒内设置有驱动电机,所述驱动电机通过传动结构驱动主轴转动,所述主轴转动连接驱动盒,所述主轴平行于基板,所述主轴的两端均同轴连接有主轮,所述主轮的外缘环形阵列有支杆,所述支杆的中心线延长线经过主轴的中心线,本发明能够提升巡检机器人越障能力,提高了
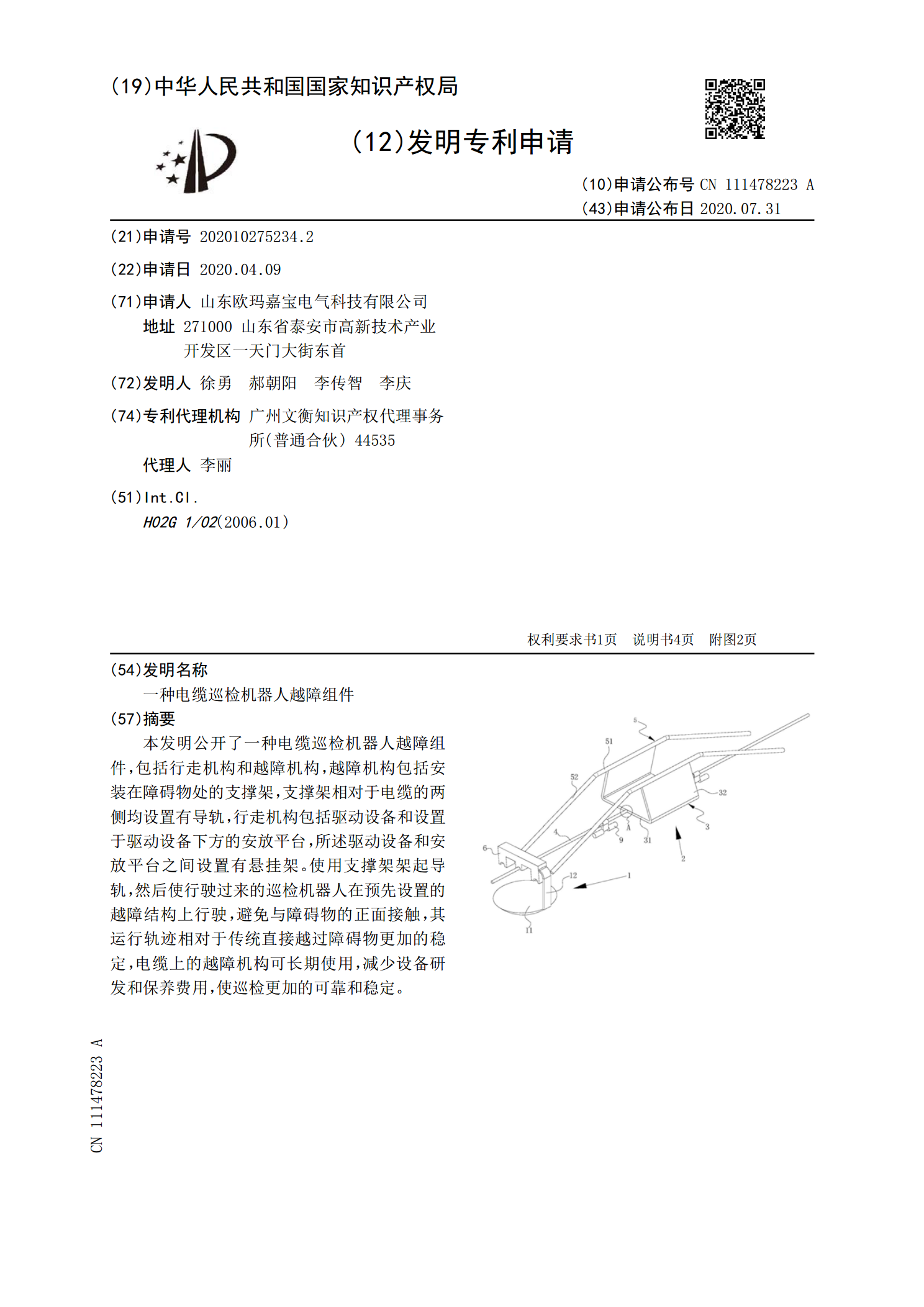
一种电缆巡检机器人越障组件.pdf
本发明公开了一种电缆巡检机器人越障组件,包括行走机构和越障机构,越障机构包括安装在障碍物处的支撑架,支撑架相对于电缆的两侧均设置有导轨,行走机构包括驱动设备和设置于驱动设备下方的安放平台,所述驱动设备和安放平台之间设置有悬挂架。使用支撑架架起导轨,然后使行驶过来的巡检机器人在预先设置的越障结构上行驶,避免与障碍物的正面接触,其运行轨迹相对于传统直接越过障碍物更加的稳定,电缆上的越障机构可长期使用,减少设备研发和保养费用,使巡检更加的可靠和稳定。
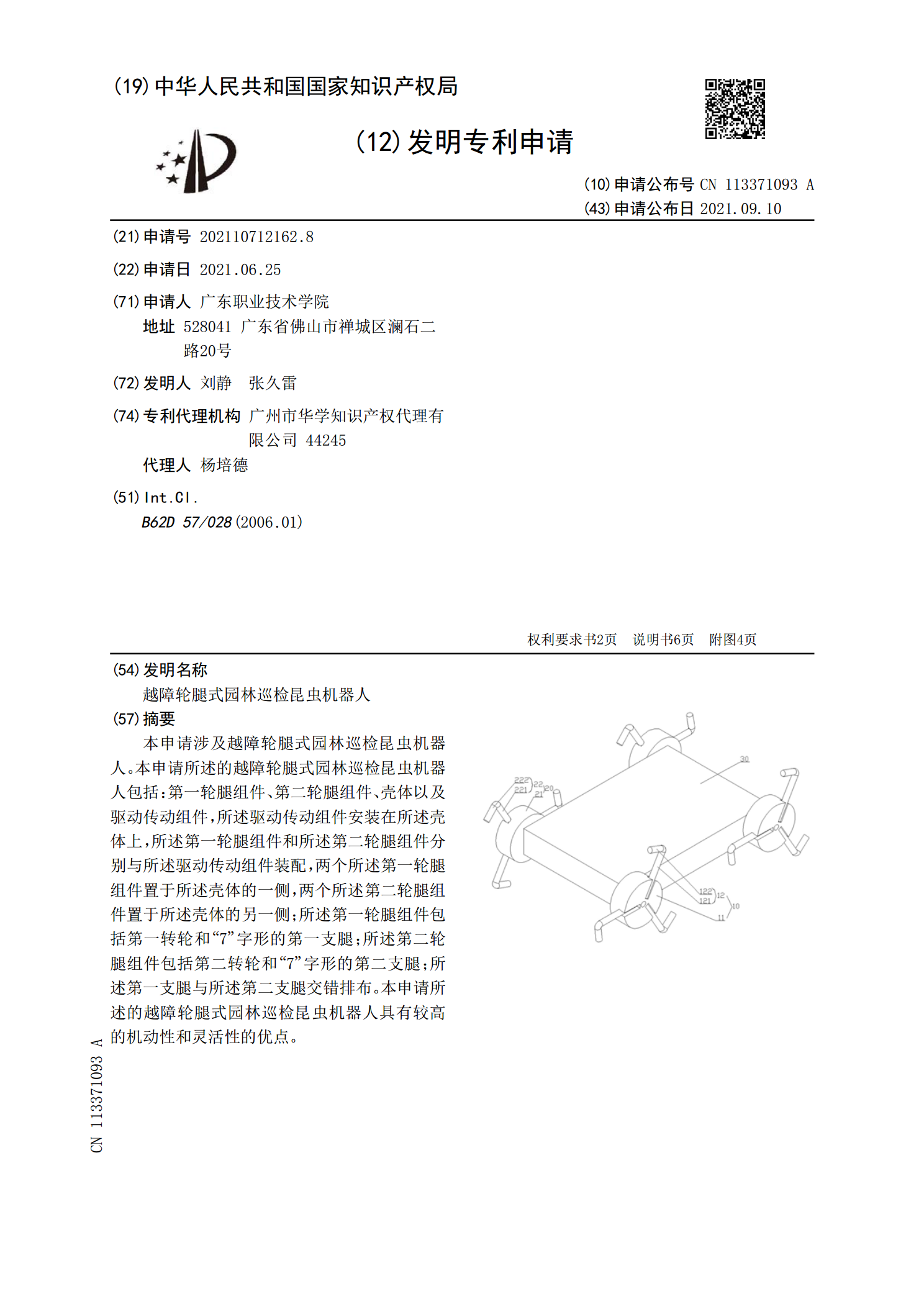
越障轮腿式园林巡检昆虫机器人.pdf
本申请涉及越障轮腿式园林巡检昆虫机器人。本申请所述的越障轮腿式园林巡检昆虫机器人包括:第一轮腿组件、第二轮腿组件、壳体以及驱动传动组件,所述驱动传动组件安装在所述壳体上,所述第一轮腿组件和所述第二轮腿组件分别与所述驱动传动组件装配,两个所述第一轮腿组件置于所述壳体的一侧,两个所述第二轮腿组件置于所述壳体的另一侧;所述第一轮腿组件包括第一转轮和“7”字形的第一支腿;所述第二轮腿组件包括第二转轮和“7”字形的第二支腿;所述第一支腿与所述第二支腿交错排布。本申请所述的越障轮腿式园林巡检昆虫机器人具有较高的机动性
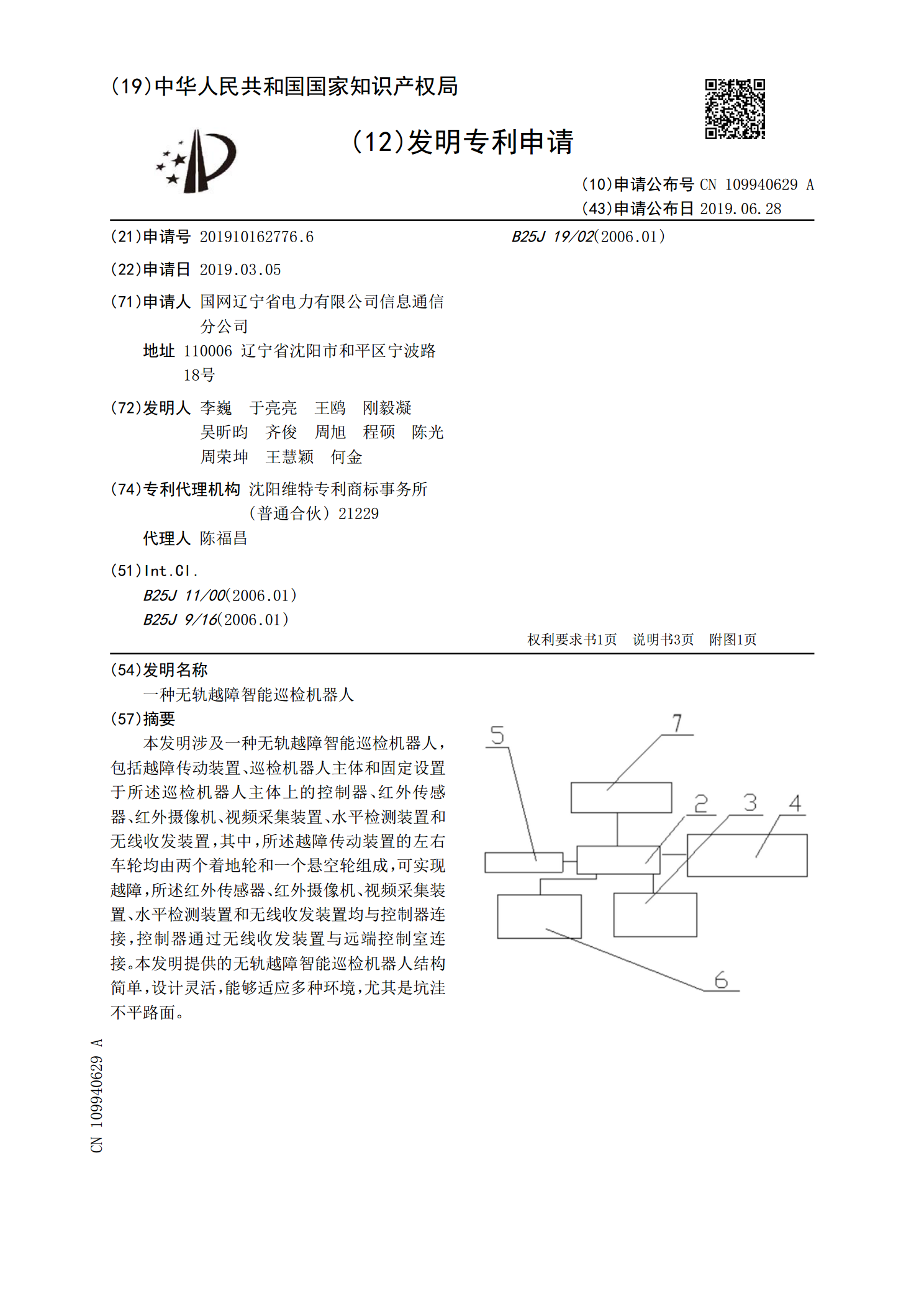
一种无轨越障智能巡检机器人.pdf
本发明涉及一种无轨越障智能巡检机器人,包括越障传动装置、巡检机器人主体和固定设置于所述巡检机器人主体上的控制器、红外传感器、红外摄像机、视频采集装置、水平检测装置和无线收发装置,其中,所述越障传动装置的左右车轮均由两个着地轮和一个悬空轮组成,可实现越障,所述红外传感器、红外摄像机、视频采集装置、水平检测装置和无线收发装置均与控制器连接,控制器通过无线收发装置与远端控制室连接。本发明提供的无轨越障智能巡检机器人结构简单,设计灵活,能够适应多种环境,尤其是坑洼不平路面。