
越障轮腿式园林巡检昆虫机器人.pdf

书生****22


1/10
2/10
3/10

4/10
5/10
6/10

7/10
8/10
9/10
10/10
亲,该文档总共13页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
越障轮腿式园林巡检昆虫机器人.pdf
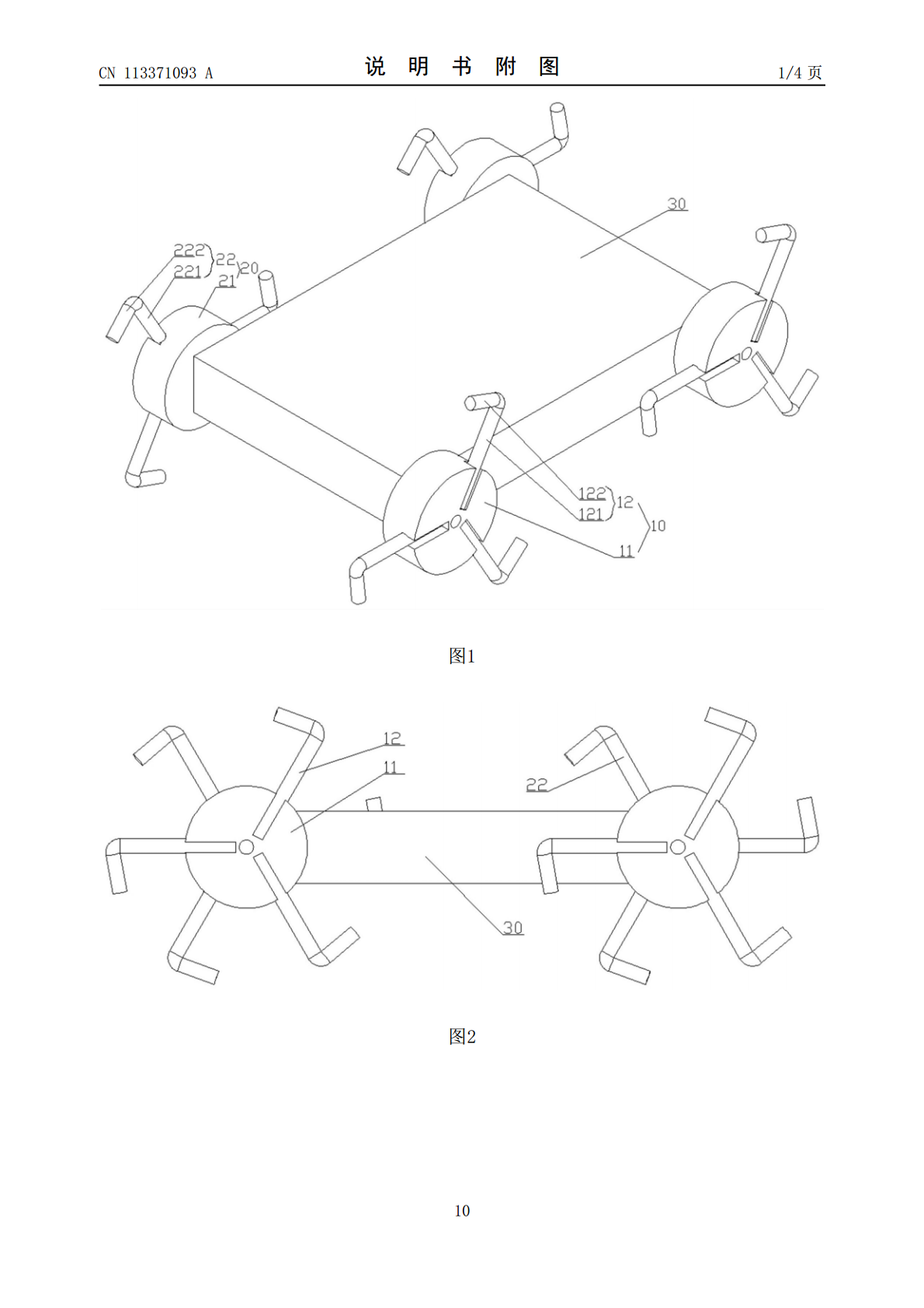
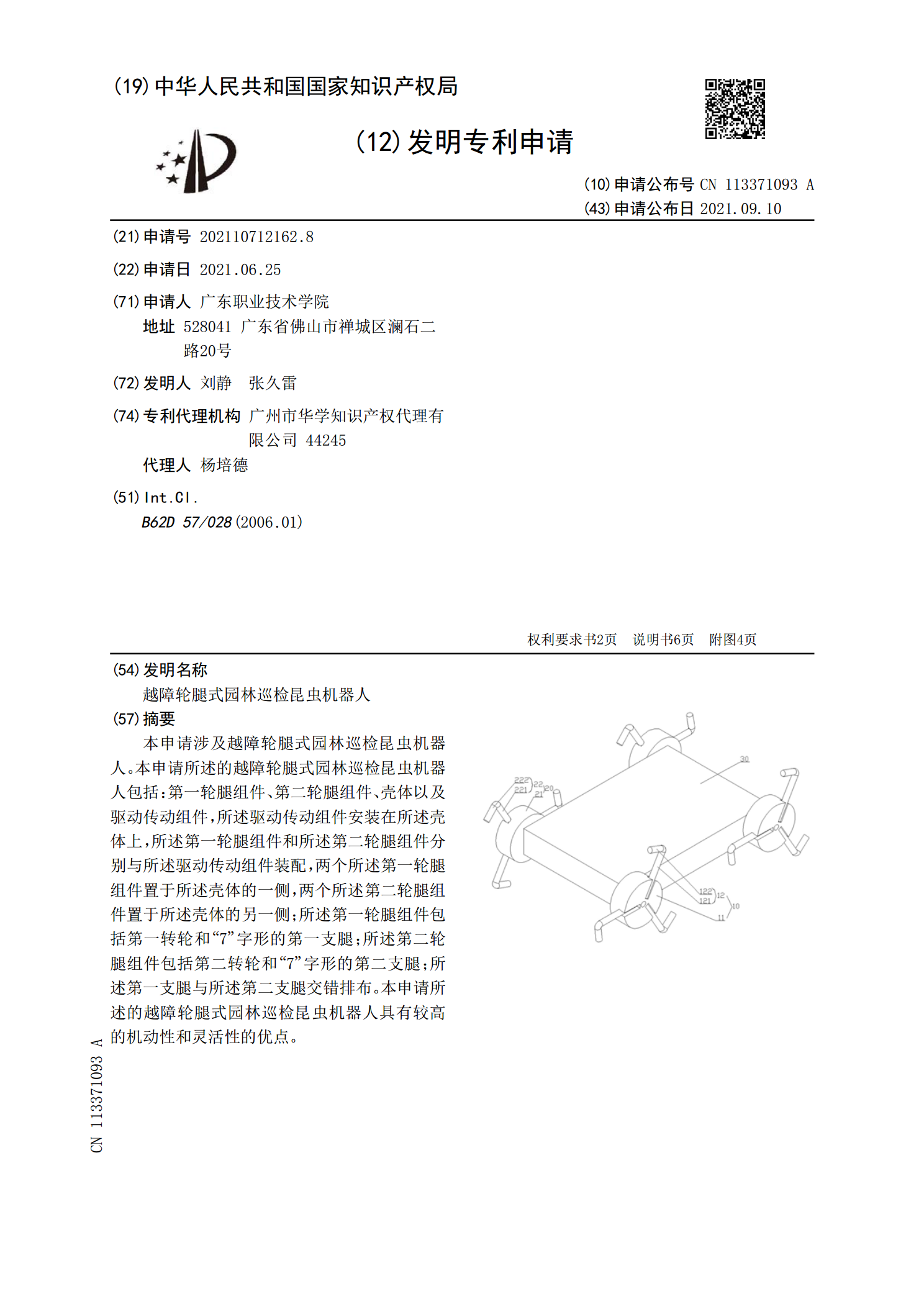
本申请涉及越障轮腿式园林巡检昆虫机器人。本申请所述的越障轮腿式园林巡检昆虫机器人包括:第一轮腿组件、第二轮腿组件、壳体以及驱动传动组件,所述驱动传动组件安装在所述壳体上,所述第一轮腿组件和所述第二轮腿组件分别与所述驱动传动组件装配,两个所述第一轮腿组件置于所述壳体的一侧,两个所述第二轮腿组件置于所述壳体的另一侧;所述第一轮腿组件包括第一转轮和“7”字形的第一支腿;所述第二轮腿组件包括第二转轮和“7”字形的第二支腿;所述第一支腿与所述第二支腿交错排布。本申请所述的越障轮腿式园林巡检昆虫机器人具有较高的机动性

轮腿式越障机器人.pdf
本发明提供了一种轮腿式越障机器人,属于移动机器人领域,其包括相连接的机架和轮腿机构;轮腿机构包括机架关节、机械臂转向装置、机械臂、轮体转向装置和轮体装置;机械臂转向装置与机架关节转动连接,机械臂一端与机械臂转向装置连接,另一端连接轮体转向装置,轮体装置与轮体转向装置转动连接,机械臂包括伸缩驱动装置以及能够折叠变形的四边形机构,伸缩驱动装置的固定端和伸缩端分别连接四边形机构的对角线的两端。利用机械臂转向装置能够驱动机械臂水平转动,利用轮体转向装置能够驱动轮体装置水平转动,机械臂通过其自身的伸缩驱动装置实现沿
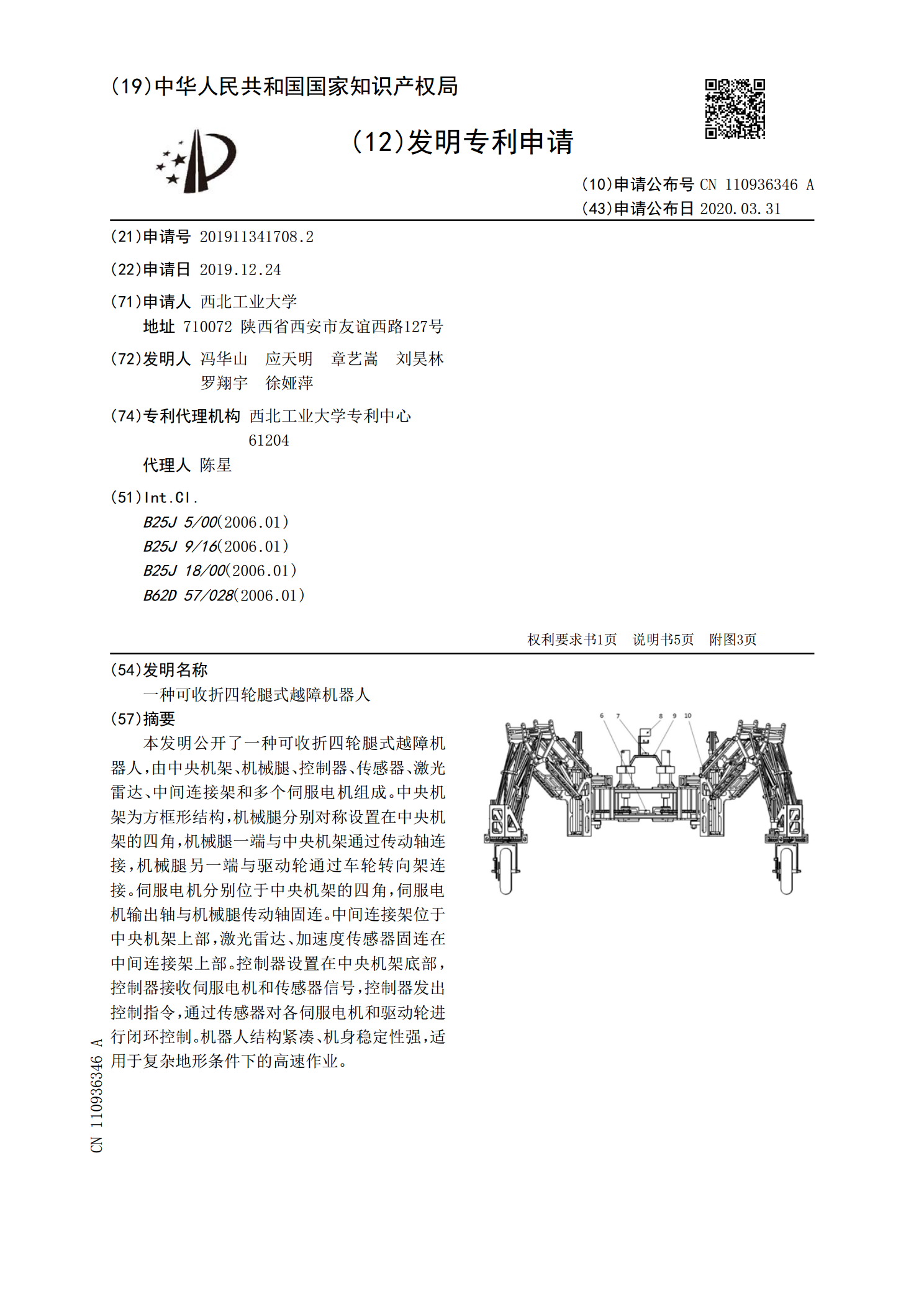
一种可收折四轮腿式越障机器人.pdf
本发明公开了一种可收折四轮腿式越障机器人,由中央机架、机械腿、控制器、传感器、激光雷达、中间连接架和多个伺服电机组成。中央机架为方框形结构,机械腿分别对称设置在中央机架的四角,机械腿一端与中央机架通过传动轴连接,机械腿另一端与驱动轮通过车轮转向架连接。伺服电机分别位于中央机架的四角,伺服电机输出轴与机械腿传动轴固连。中间连接架位于中央机架上部,激光雷达、加速度传感器固连在中间连接架上部。控制器设置在中央机架底部,控制器接收伺服电机和传感器信号,控制器发出控制指令,通过传感器对各伺服电机和驱动轮进行闭环控制
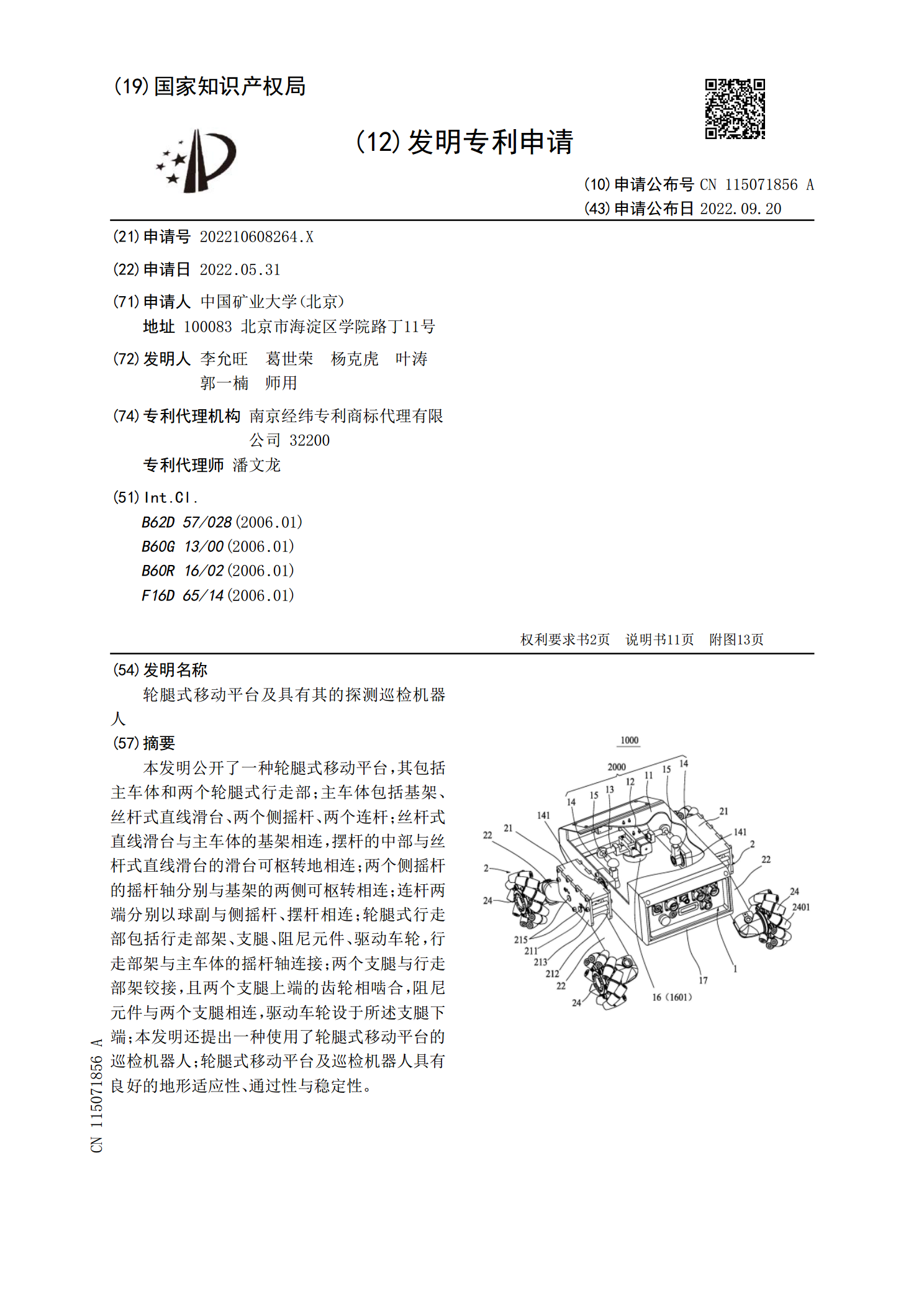
轮腿式移动平台及具有其的探测巡检机器人.pdf
本发明公开了一种轮腿式移动平台,其包括主车体和两个轮腿式行走部;主车体包括基架、丝杆式直线滑台、两个侧摇杆、两个连杆;丝杆式直线滑台与主车体的基架相连,摆杆的中部与丝杆式直线滑台的滑台可枢转地相连;两个侧摇杆的摇杆轴分别与基架的两侧可枢转相连;连杆两端分别以球副与侧摇杆、摆杆相连;轮腿式行走部包括行走部架、支腿、阻尼元件、驱动车轮,行走部架与主车体的摇杆轴连接;两个支腿与行走部架铰接,且两个支腿上端的齿轮相啮合,阻尼元件与两个支腿相连,驱动车轮设于所述支腿下端;本发明还提出一种使用了轮腿式移动平台的巡检机

一种变电站巡检轮履式越障机器人.pdf
本发明涉及一种变电站巡检轮履式越障机器人。主要包括:底盘;安装于所述底盘上的动力机构,该动力机构具有行走动力源及摆臂动力源,行走动力源将动力通过传动轴输出给安装于所述底盘两侧的行走轮;被所述摆臂动力源驱动的摆臂,所述摆臂上安装有主行走带轮、摆臂带轮及相啮合的行走履带,且所述主行走带轮与行走轮同传动轴装配;其中,所述摆臂动力源通过驱动摆臂摆动实现机器人的履带行走和/或行走轮行走。本发明所提供的机器人,能够根据不同的路况呈现出不同的行走状态,并能通过摆臂摆动获得极高的越障能力。