
一种减震底盘及带有减震底盘的变电站轮履式越障机器人.pdf

康平****ng


1/10
2/10

3/10
4/10

5/10

6/10

7/10
8/10

9/10

10/10
亲,该文档总共18页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种减震底盘及带有减震底盘的变电站轮履式越障机器人.pdf
本发明公开了一种减震底盘及带有减震底盘的变电站轮履式越障机器人,减震底盘包括下支撑板,在下支撑板的顶部设有悬空的左支撑板和右支撑板,左、右支撑板与下支撑板之间垂直设有减震装置。变电站轮履式越障机器人包括减震底盘,在减震底盘上设有行走电机机构,行走电机机构通过传动装置驱动左、右两个行走轮旋转,左、右两个行走轮各自通过一个履带驱动被动轮旋转,同时两个被动轮和两个主动轮分别各自与一个履带轮形成了两个后支臂结构和两个前支臂结构;该结构能够适应变电站复杂环境运行,既可以在平坦的水泥路面行走,也可以在凹凸不平的水泥路
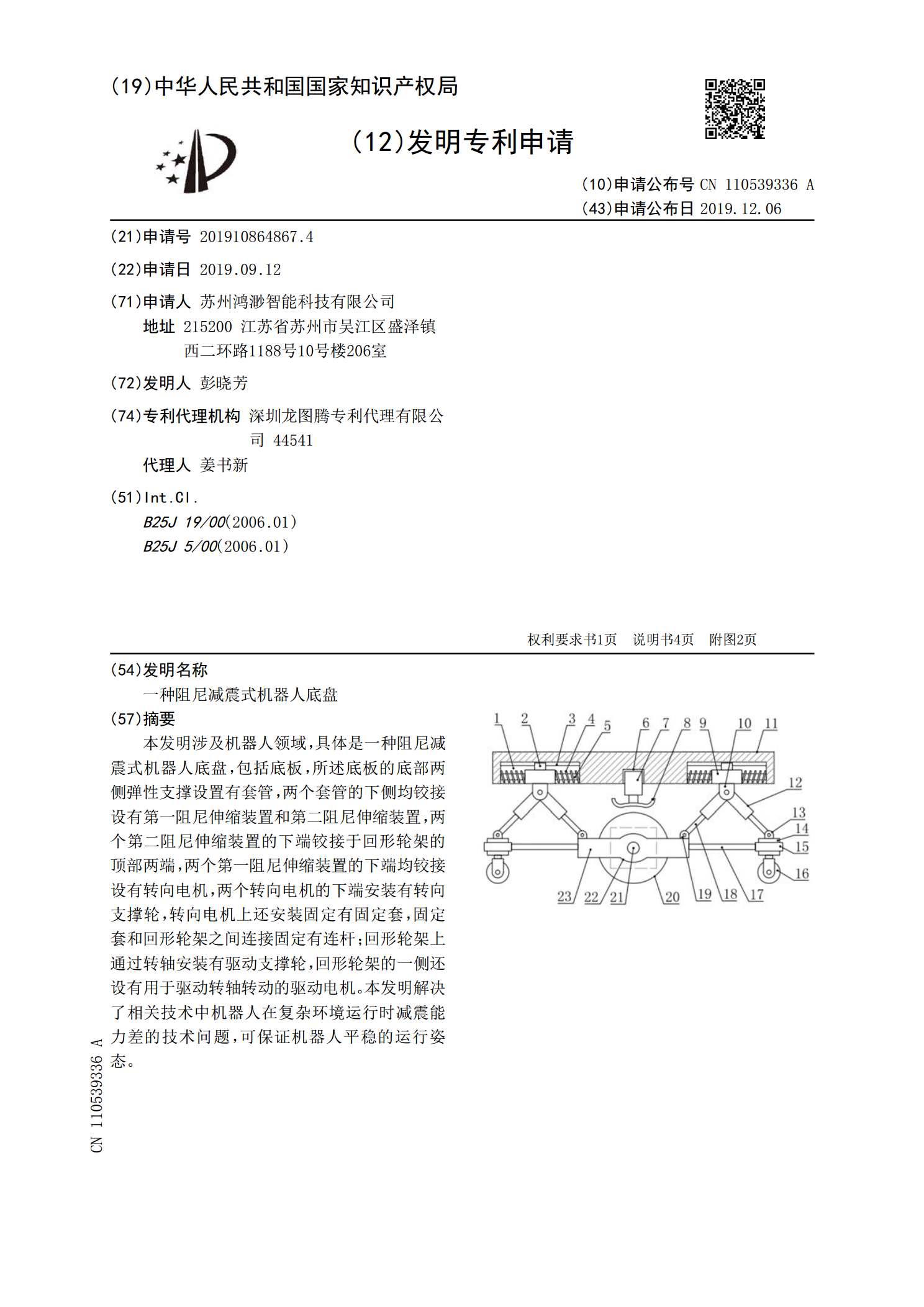
一种阻尼减震式机器人底盘.pdf
本发明涉及机器人领域,具体是一种阻尼减震式机器人底盘,包括底板,所述底板的底部两侧弹性支撑设置有套管,两个套管的下侧均铰接设有第一阻尼伸缩装置和第二阻尼伸缩装置,两个第二阻尼伸缩装置的下端铰接于回形轮架的顶部两端,两个第一阻尼伸缩装置的下端均铰接设有转向电机,两个转向电机的下端安装有转向支撑轮,转向电机上还安装固定有固定套,固定套和回形轮架之间连接固定有连杆;回形轮架上通过转轴安装有驱动支撑轮,回形轮架的一侧还设有用于驱动转轴转动的驱动电机。本发明解决了相关技术中机器人在复杂环境运行时减震能力差的技术问题
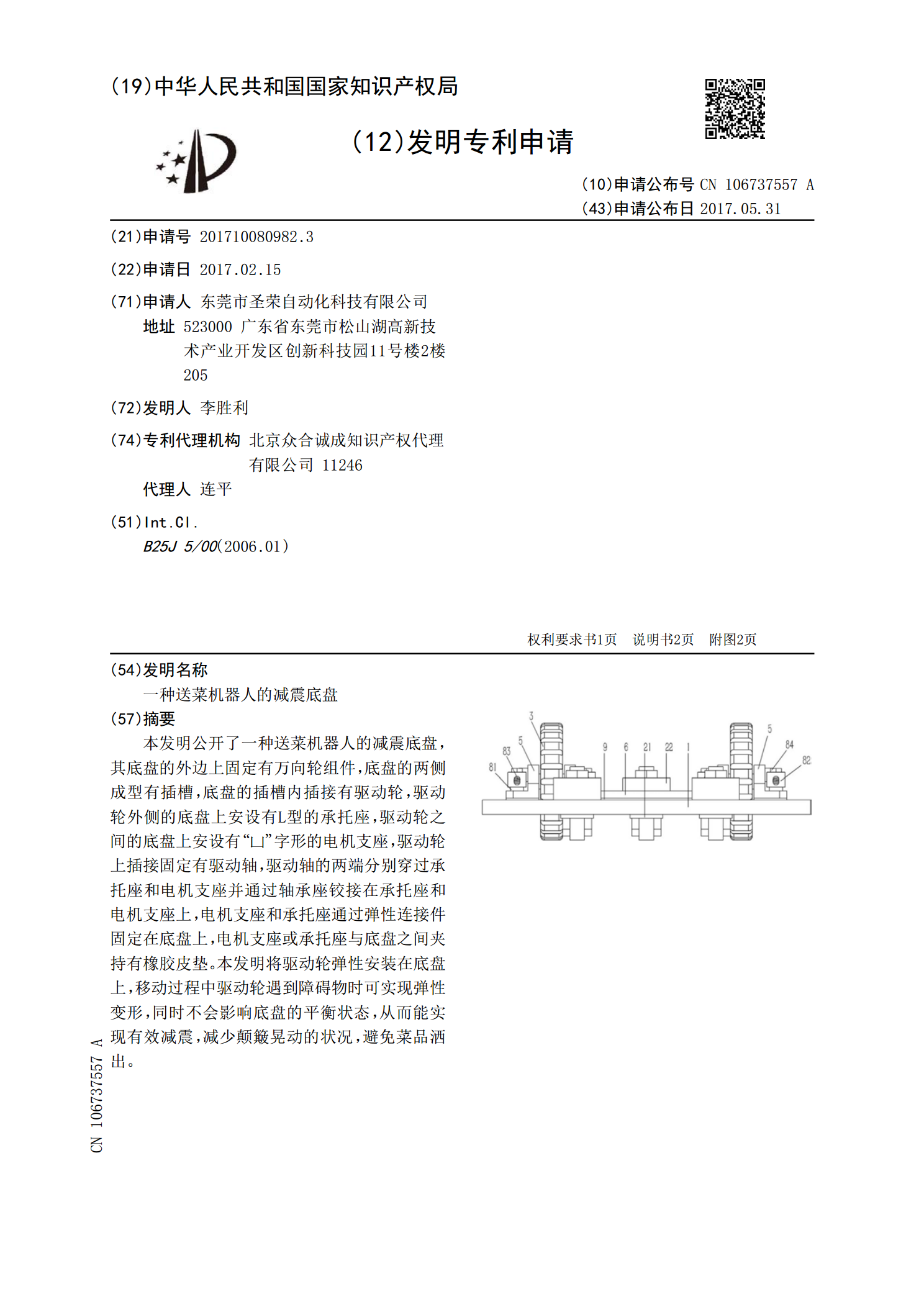
一种送菜机器人的减震底盘.pdf
本发明公开了一种送菜机器人的减震底盘,其底盘的外边上固定有万向轮组件,底盘的两侧成型有插槽,底盘的插槽内插接有驱动轮,驱动轮外侧的底盘上安设有L型的承托座,驱动轮之间的底盘上安设有“凵”字形的电机支座,驱动轮上插接固定有驱动轴,驱动轴的两端分别穿过承托座和电机支座并通过轴承座铰接在承托座和电机支座上,电机支座和承托座通过弹性连接件固定在底盘上,电机支座或承托座与底盘之间夹持有橡胶皮垫。本发明将驱动轮弹性安装在底盘上,移动过程中驱动轮遇到障碍物时可实现弹性变形,同时不会影响底盘的平衡状态,从而能实现有效减震
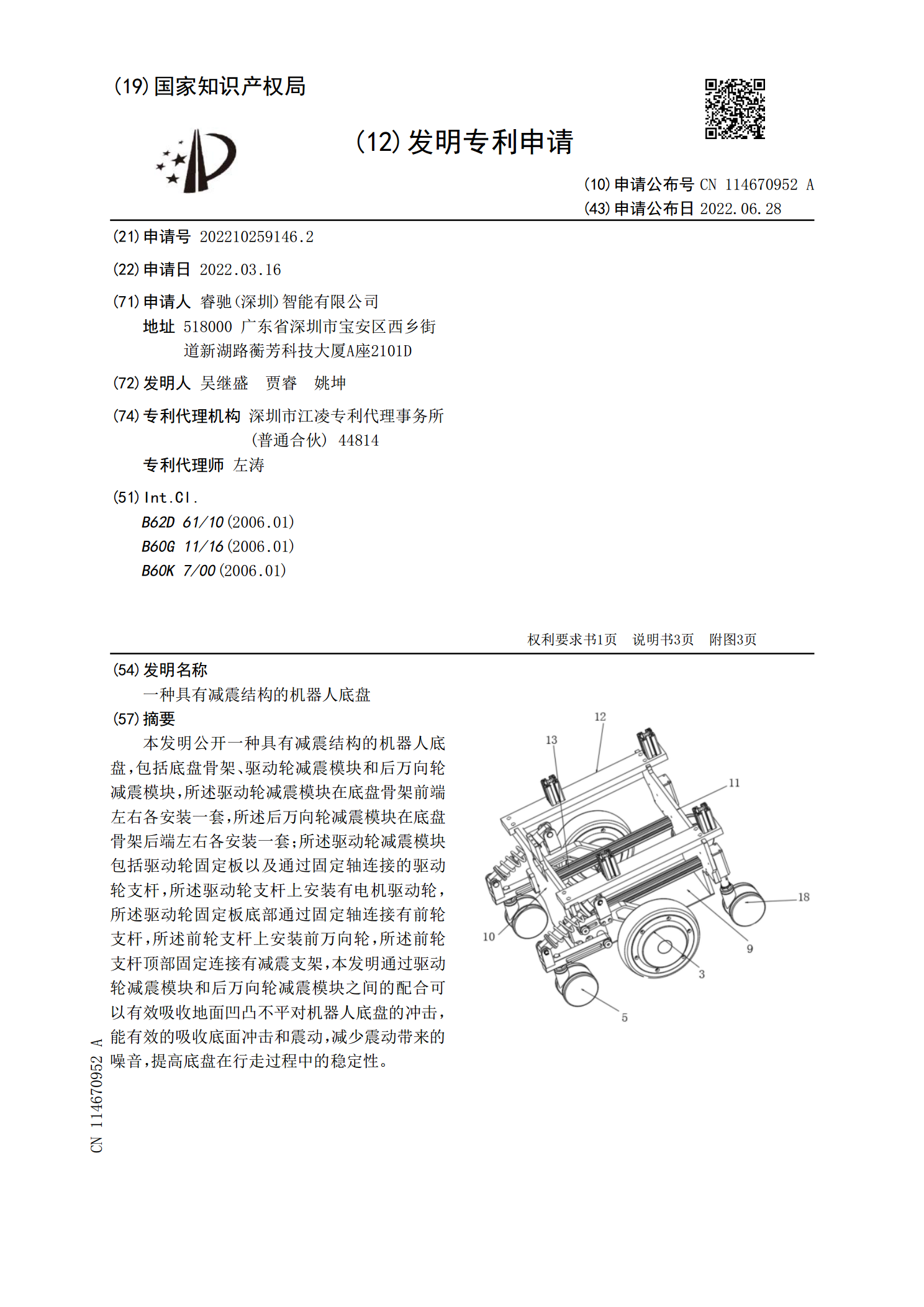
一种具有减震结构的机器人底盘.pdf
本发明公开一种具有减震结构的机器人底盘,包括底盘骨架、驱动轮减震模块和后万向轮减震模块,所述驱动轮减震模块在底盘骨架前端左右各安装一套,所述后万向轮减震模块在底盘骨架后端左右各安装一套;所述驱动轮减震模块包括驱动轮固定板以及通过固定轴连接的驱动轮支杆,所述驱动轮支杆上安装有电机驱动轮,所述驱动轮固定板底部通过固定轴连接有前轮支杆,所述前轮支杆上安装前万向轮,所述前轮支杆顶部固定连接有减震支架,本发明通过驱动轮减震模块和后万向轮减震模块之间的配合可以有效吸收地面凹凸不平对机器人底盘的冲击,能有效的吸收底面冲
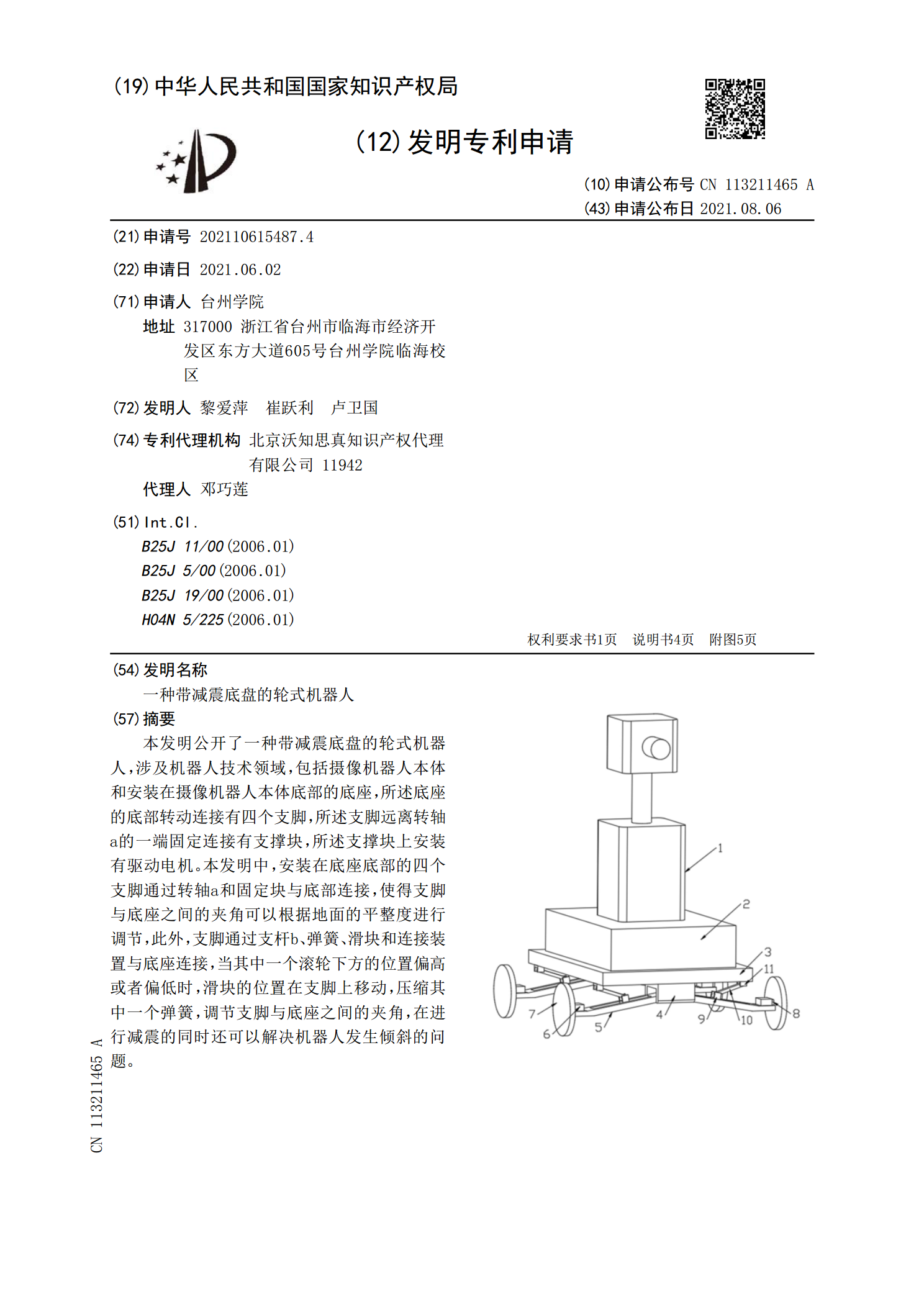
一种带减震底盘的轮式机器人.pdf
本发明公开了一种带减震底盘的轮式机器人,涉及机器人技术领域,包括摄像机器人本体和安装在摄像机器人本体底部的底座,所述底座的底部转动连接有四个支脚,所述支脚远离转轴a的一端固定连接有支撑块,所述支撑块上安装有驱动电机。本发明中,安装在底座底部的四个支脚通过转轴a和固定块与底部连接,使得支脚与底座之间的夹角可以根据地面的平整度进行调节,此外,支脚通过支杆b、弹簧、滑块和连接装置与底座连接,当其中一个滚轮下方的位置偏高或者偏低时,滑块的位置在支脚上移动,压缩其中一个弹簧,调节支脚与底座之间的夹角,在进行减震的同