
一种带减震底盘的轮式机器人.pdf

一吃****瀚文

1/10
2/10
3/10
4/10
5/10

6/10
7/10
8/10
9/10
10/10
亲,该文档总共11页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种带减震底盘的轮式机器人.pdf
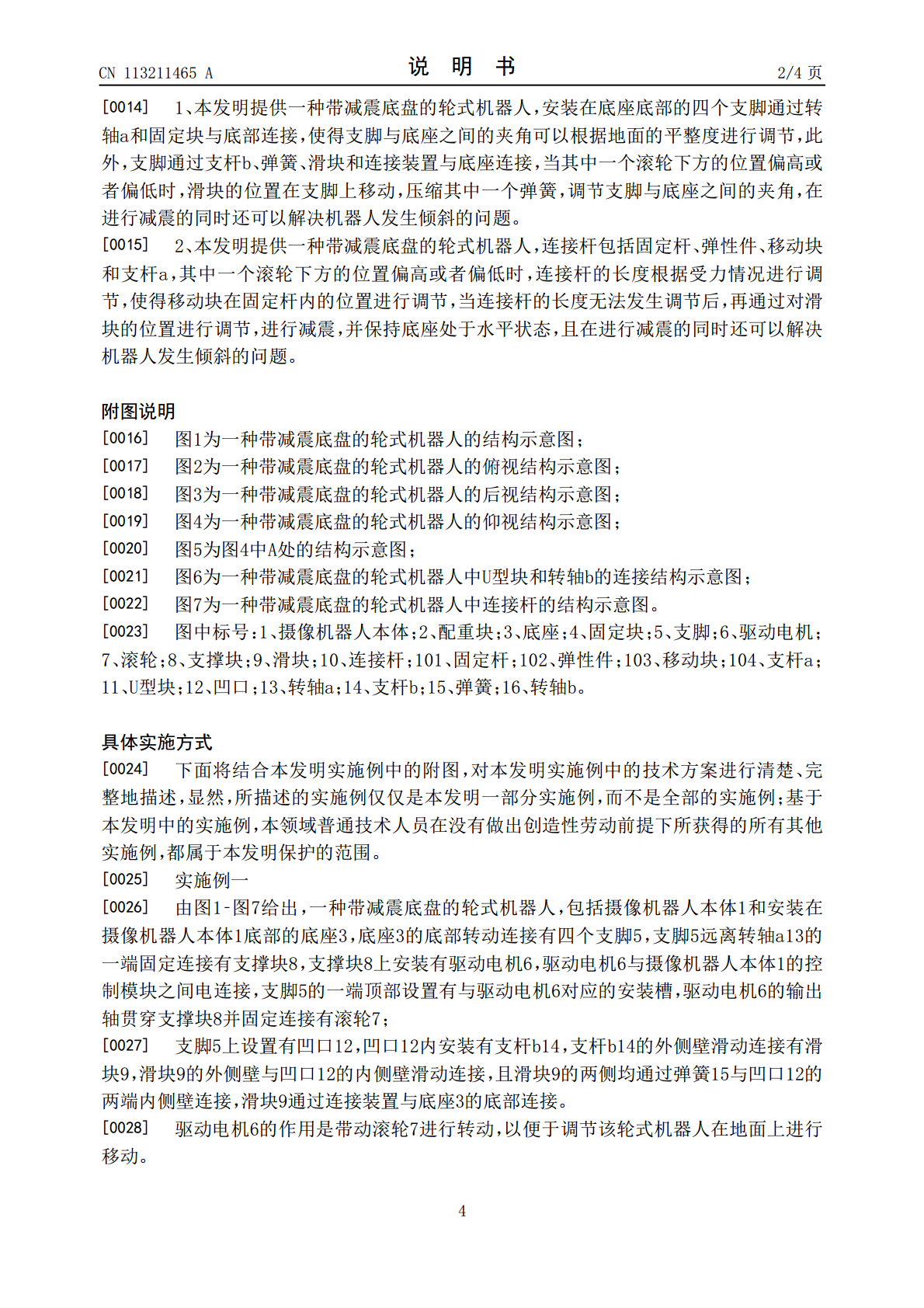
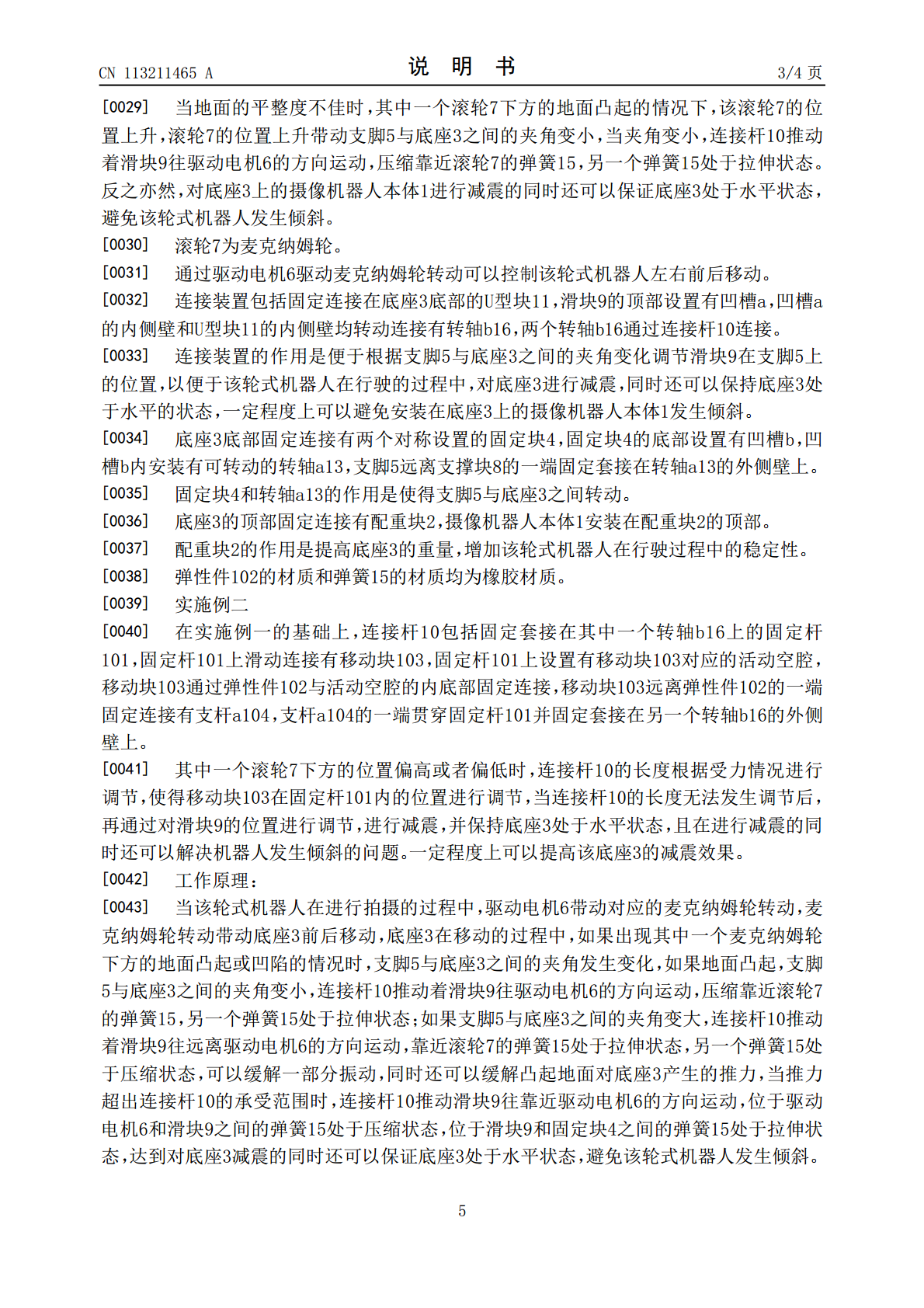
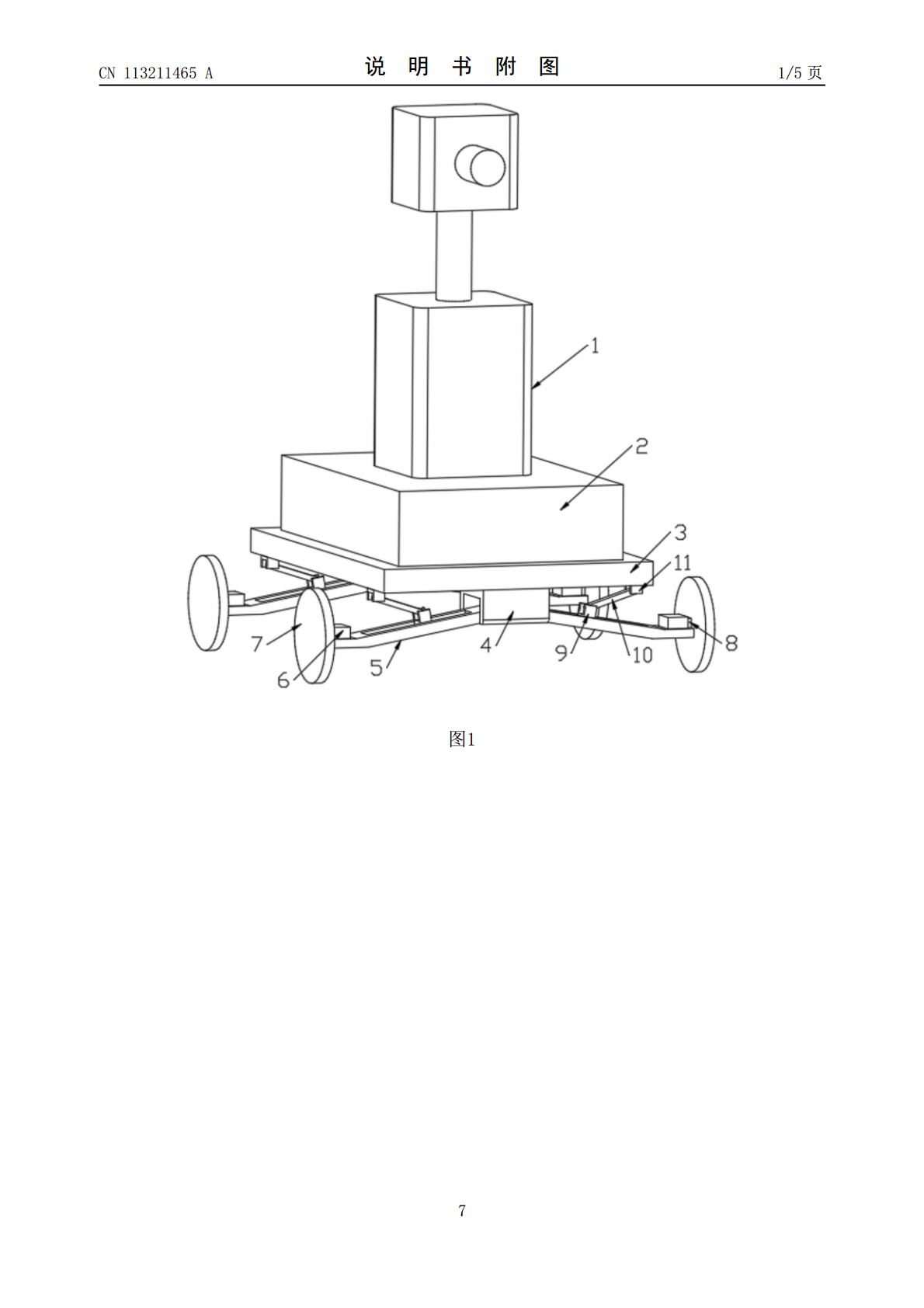
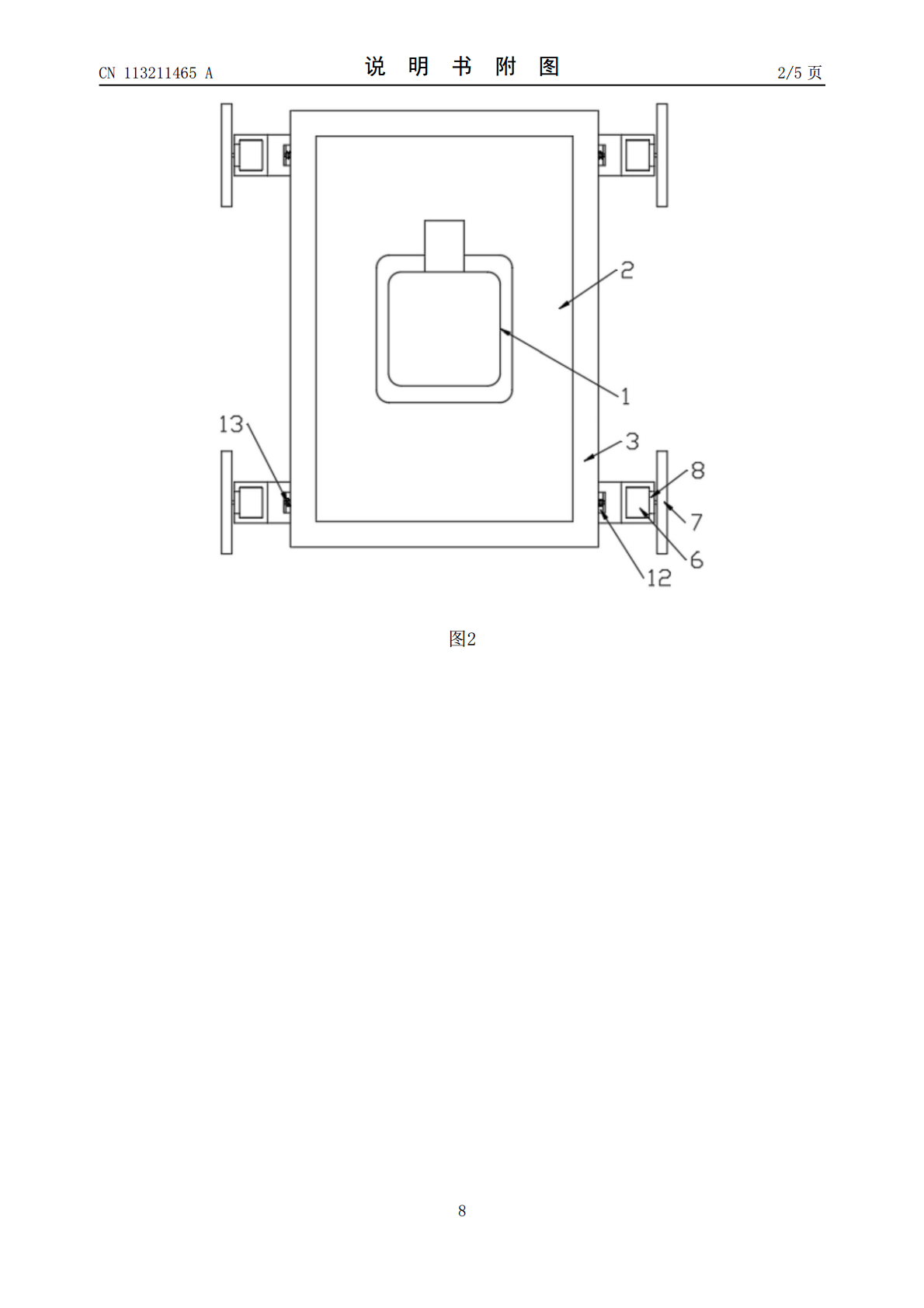
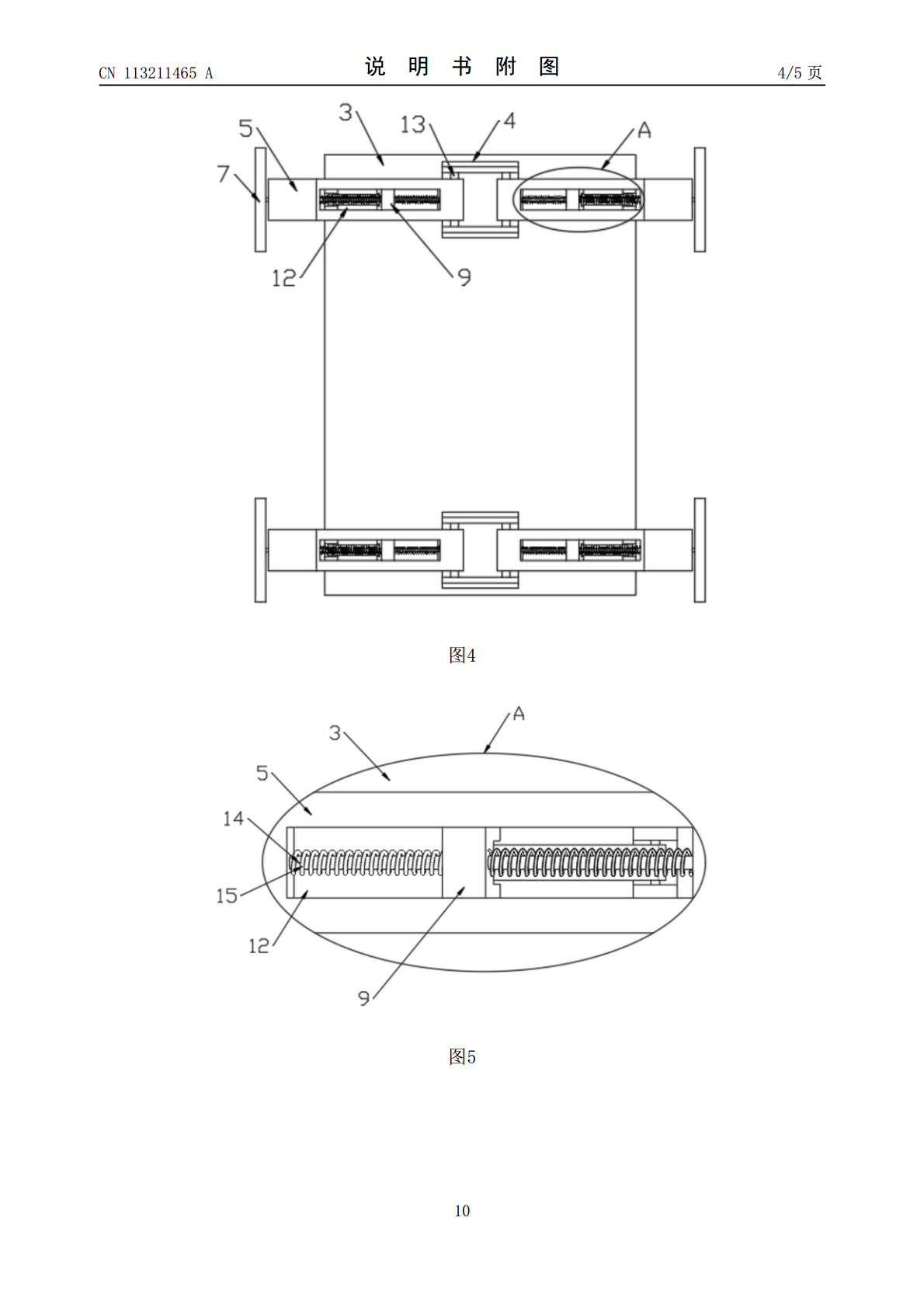
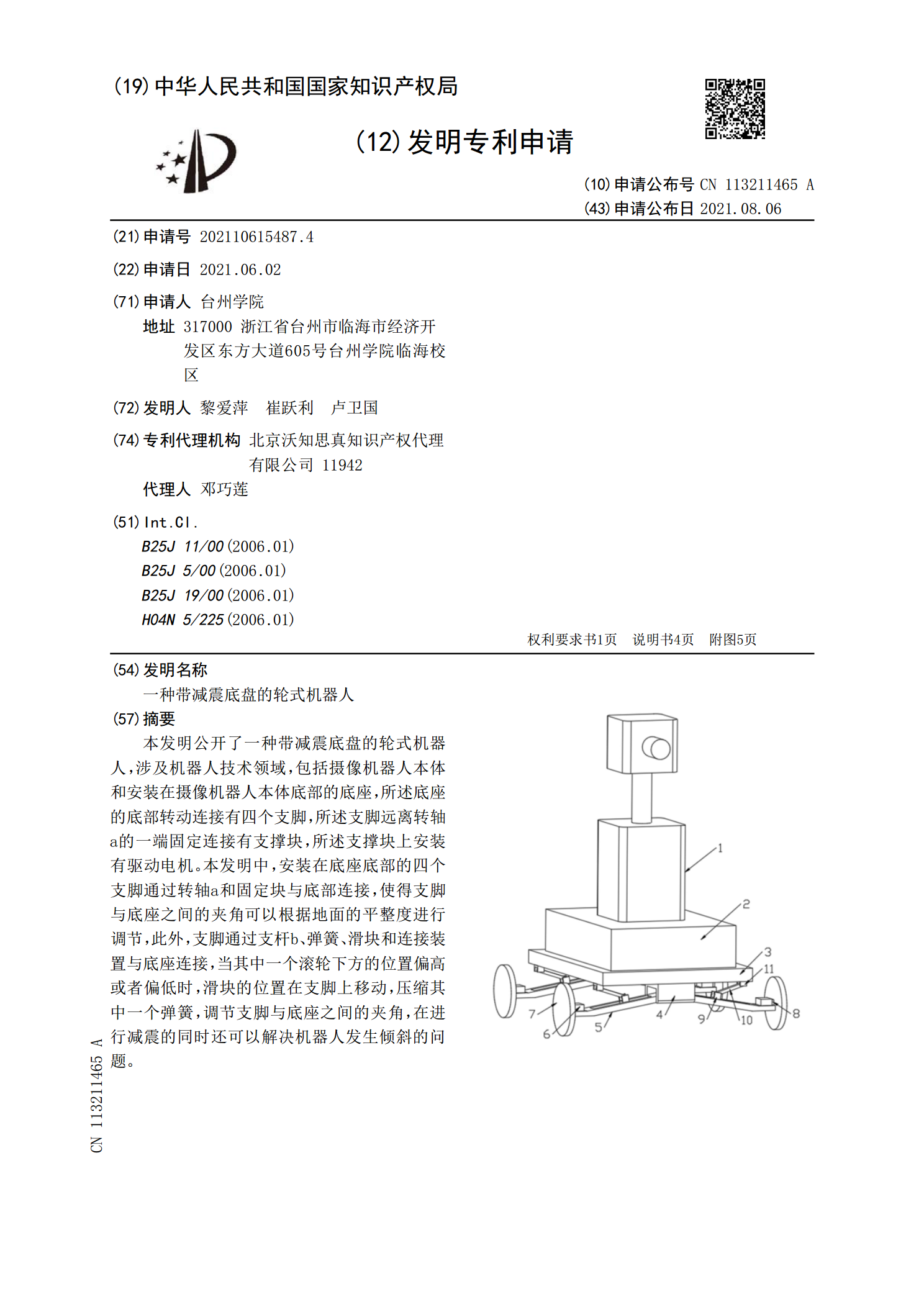
本发明公开了一种带减震底盘的轮式机器人,涉及机器人技术领域,包括摄像机器人本体和安装在摄像机器人本体底部的底座,所述底座的底部转动连接有四个支脚,所述支脚远离转轴a的一端固定连接有支撑块,所述支撑块上安装有驱动电机。本发明中,安装在底座底部的四个支脚通过转轴a和固定块与底部连接,使得支脚与底座之间的夹角可以根据地面的平整度进行调节,此外,支脚通过支杆b、弹簧、滑块和连接装置与底座连接,当其中一个滚轮下方的位置偏高或者偏低时,滑块的位置在支脚上移动,压缩其中一个弹簧,调节支脚与底座之间的夹角,在进行减震的同
轮式机器人弹性减震底盘结构.pdf
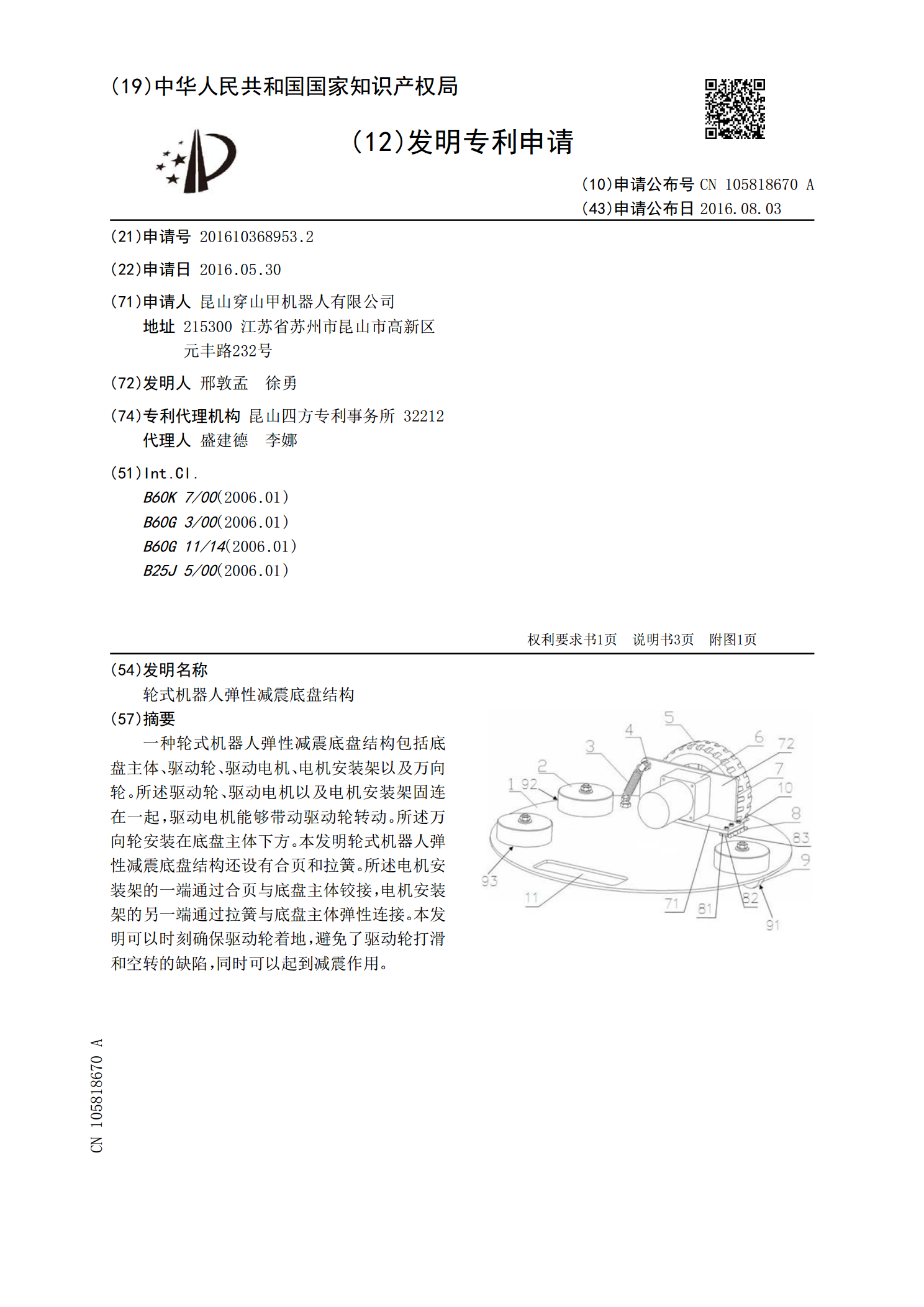
一种轮式机器人弹性减震底盘结构包括底盘主体、驱动轮、驱动电机、电机安装架以及万向轮。所述驱动轮、驱动电机以及电机安装架固连在一起,驱动电机能够带动驱动轮转动。所述万向轮安装在底盘主体下方。本发明轮式机器人弹性减震底盘结构还设有合页和拉簧。所述电机安装架的一端通过合页与底盘主体铰接,电机安装架的另一端通过拉簧与底盘主体弹性连接。本发明可以时刻确保驱动轮着地,避免了驱动轮打滑和空转的缺陷,同时可以起到减震作用。
轮式移动机器人底盘直线悬挂减震装置.pdf
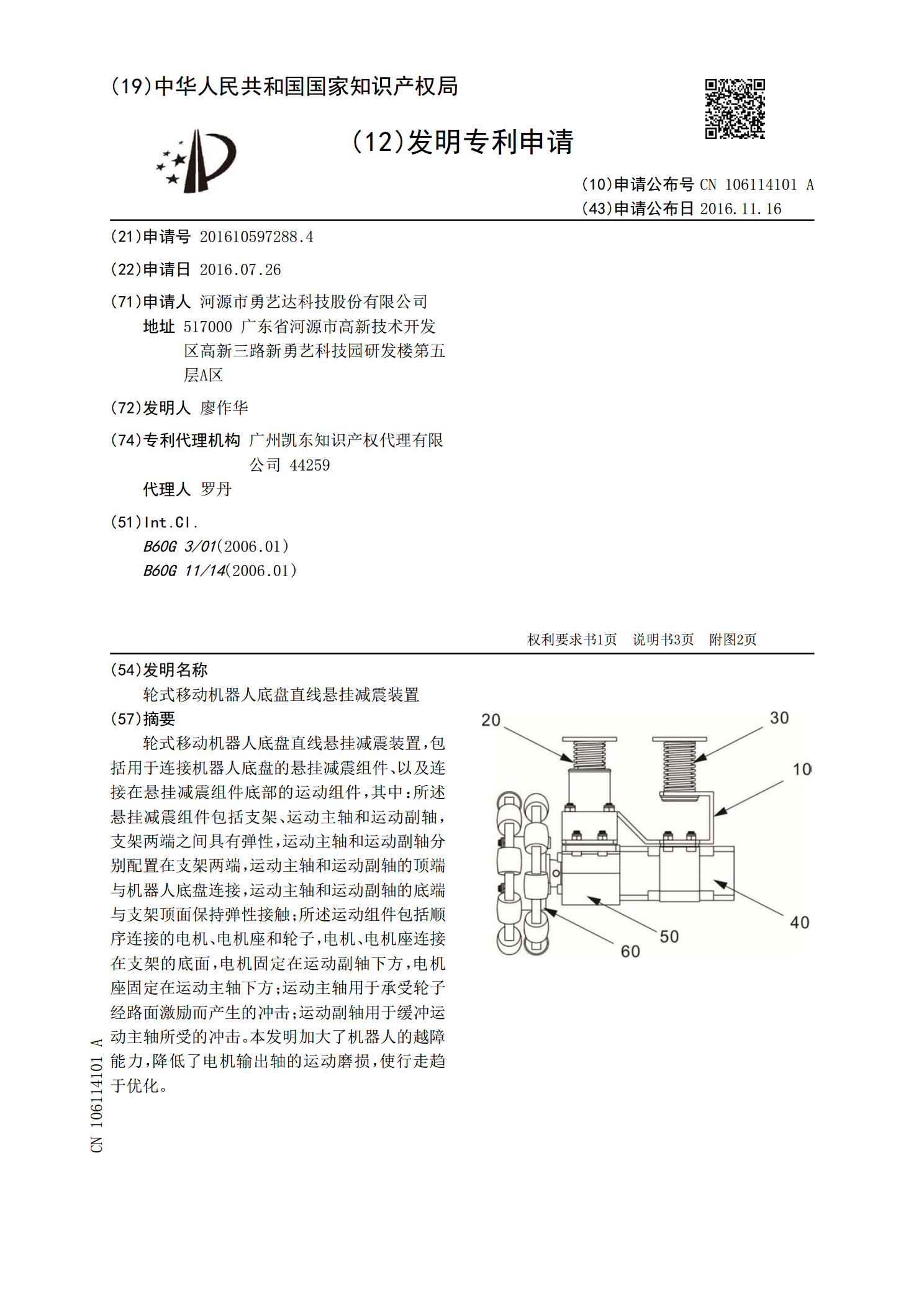
轮式移动机器人底盘直线悬挂减震装置,包括用于连接机器人底盘的悬挂减震组件、以及连接在悬挂减震组件底部的运动组件,其中:所述悬挂减震组件包括支架、运动主轴和运动副轴,支架两端之间具有弹性,运动主轴和运动副轴分别配置在支架两端,运动主轴和运动副轴的顶端与机器人底盘连接,运动主轴和运动副轴的底端与支架顶面保持弹性接触;所述运动组件包括顺序连接的电机、电机座和轮子,电机、电机座连接在支架的底面,电机固定在运动副轴下方,电机座固定在运动主轴下方;运动主轴用于承受轮子经路面激励而产生的冲击;运动副轴用于缓冲运动主轴所
一种轮式机器人底盘.pdf
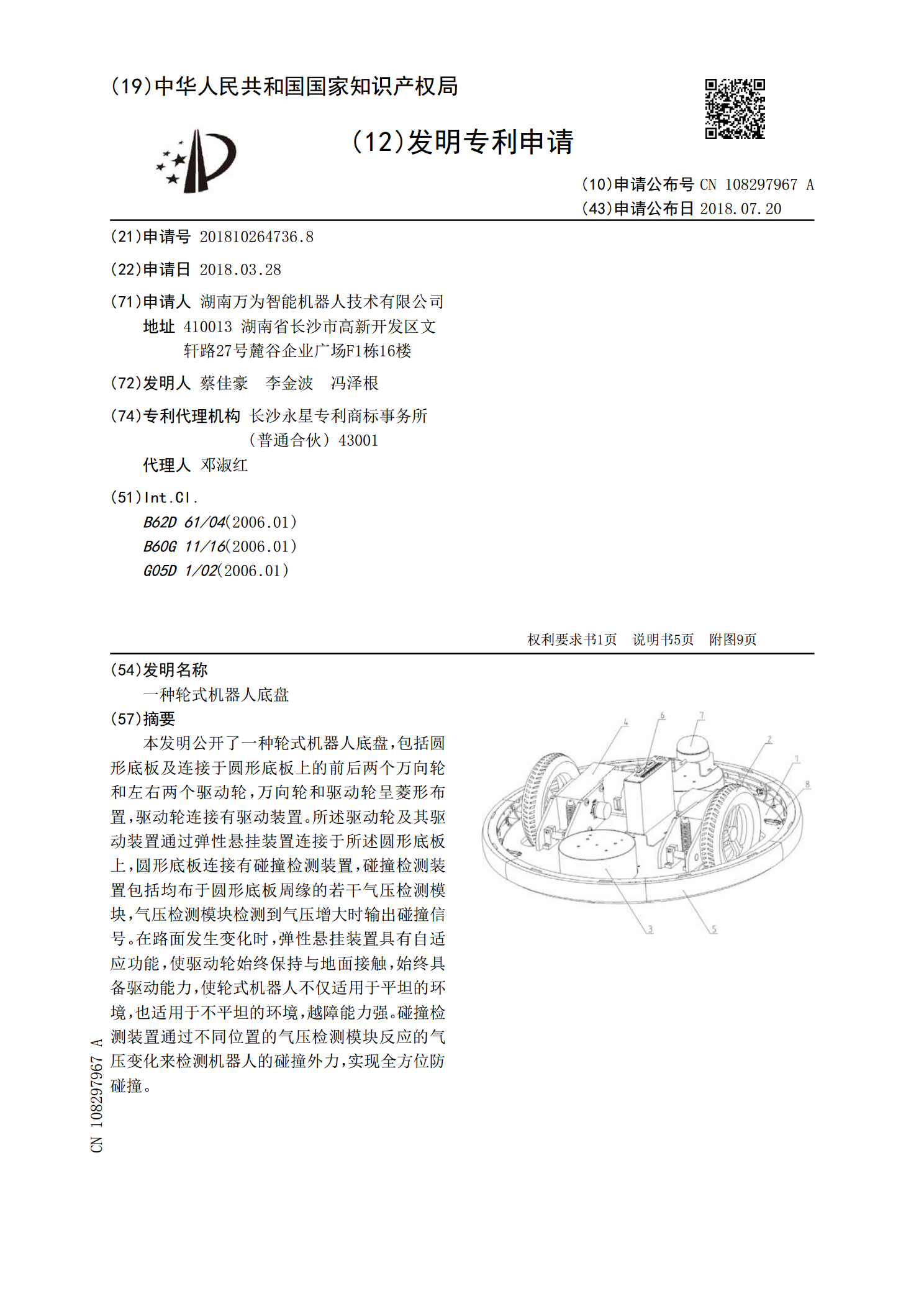
本发明公开了一种轮式机器人底盘,包括圆形底板及连接于圆形底板上的前后两个万向轮和左右两个驱动轮,万向轮和驱动轮呈菱形布置,驱动轮连接有驱动装置。所述驱动轮及其驱动装置通过弹性悬挂装置连接于所述圆形底板上,圆形底板连接有碰撞检测装置,碰撞检测装置包括均布于圆形底板周缘的若干气压检测模块,气压检测模块检测到气压增大时输出碰撞信号。在路面发生变化时,弹性悬挂装置具有自适应功能,使驱动轮始终保持与地面接触,始终具备驱动能力,使轮式机器人不仅适用于平坦的环境,也适用于不平坦的环境,越障能力强。碰撞检测装置通过不同位
一种轮式机器人底盘.pdf
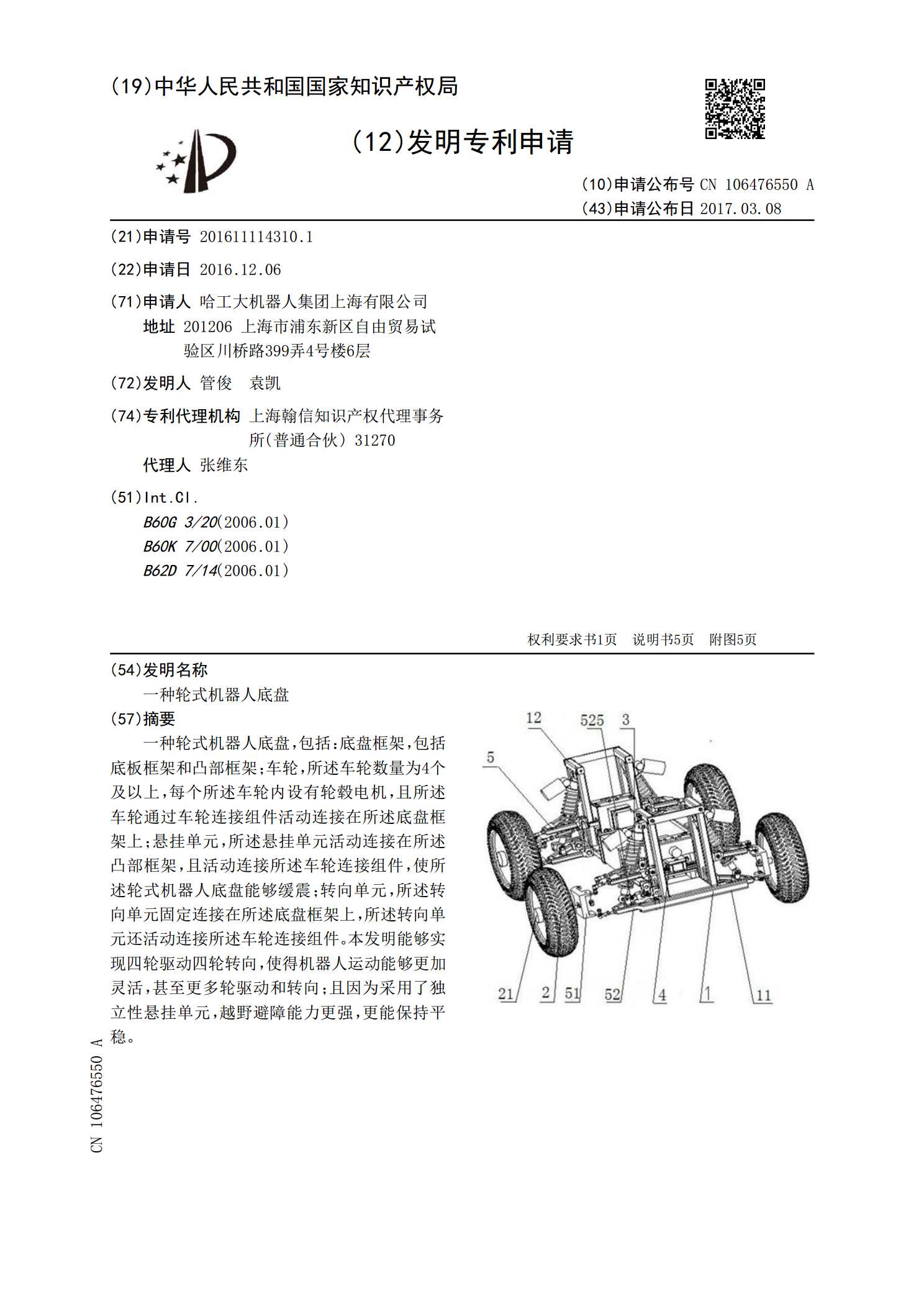
一种轮式机器人底盘,包括:底盘框架,包括底板框架和凸部框架;车轮,所述车轮数量为4个及以上,每个所述车轮内设有轮毂电机,且所述车轮通过车轮连接组件活动连接在所述底盘框架上;悬挂单元,所述悬挂单元活动连接在所述凸部框架,且活动连接所述车轮连接组件,使所述轮式机器人底盘能够缓震;转向单元,所述转向单元固定连接在所述底盘框架上,所述转向单元还活动连接所述车轮连接组件。本发明能够实现四轮驱动四轮转向,使得机器人运动能够更加灵活,甚至更多轮驱动和转向;且因为采用了独立性悬挂单元,越野避障能力更强,更能保持平稳。