
基于边缘反投影的视觉定位方法及自动分料上料装置.pdf

元枫****文章


1/8

2/8
3/8

4/8

5/8

6/8

7/8

8/8
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
基于边缘反投影的视觉定位方法及自动分料上料装置.pdf
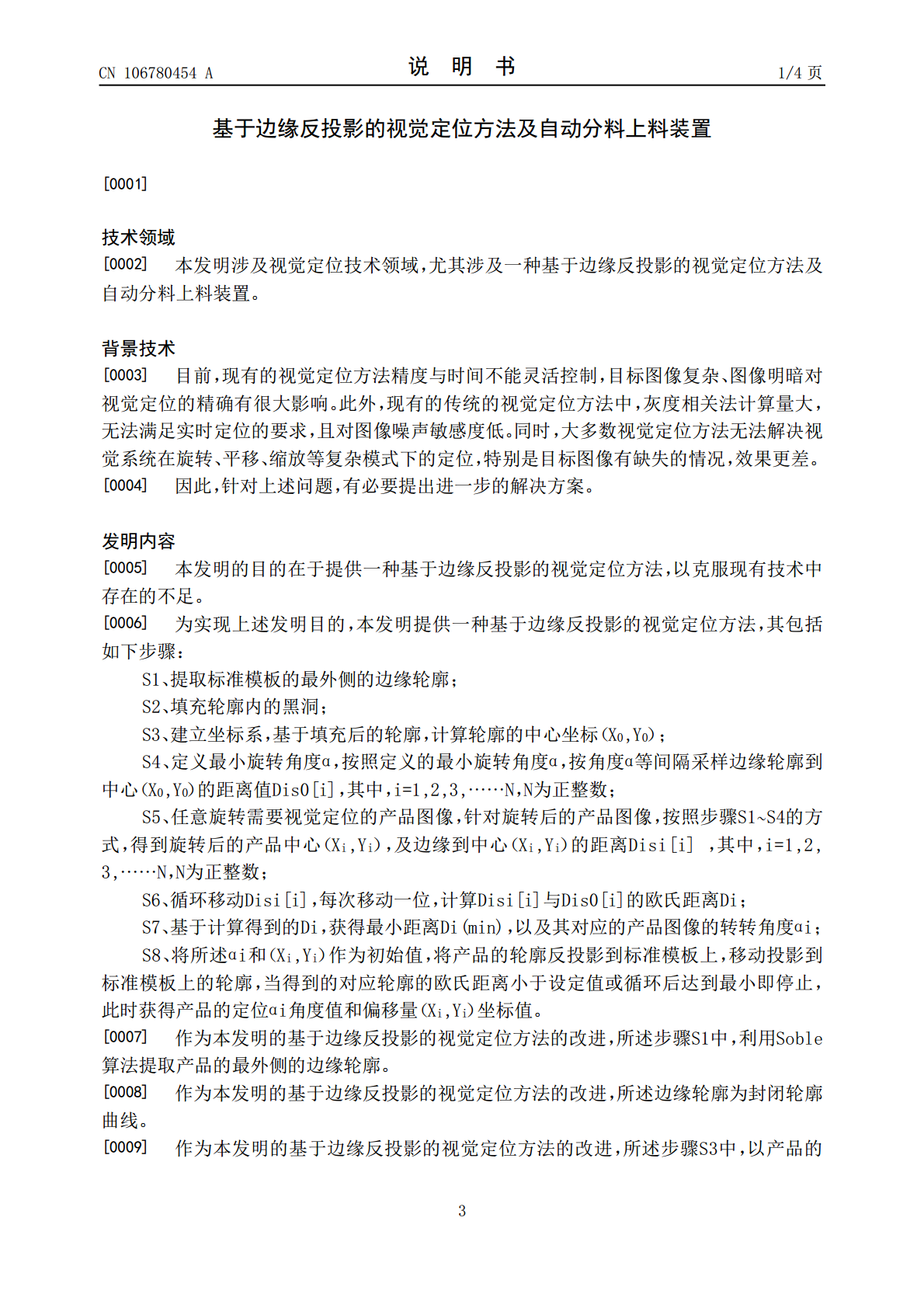
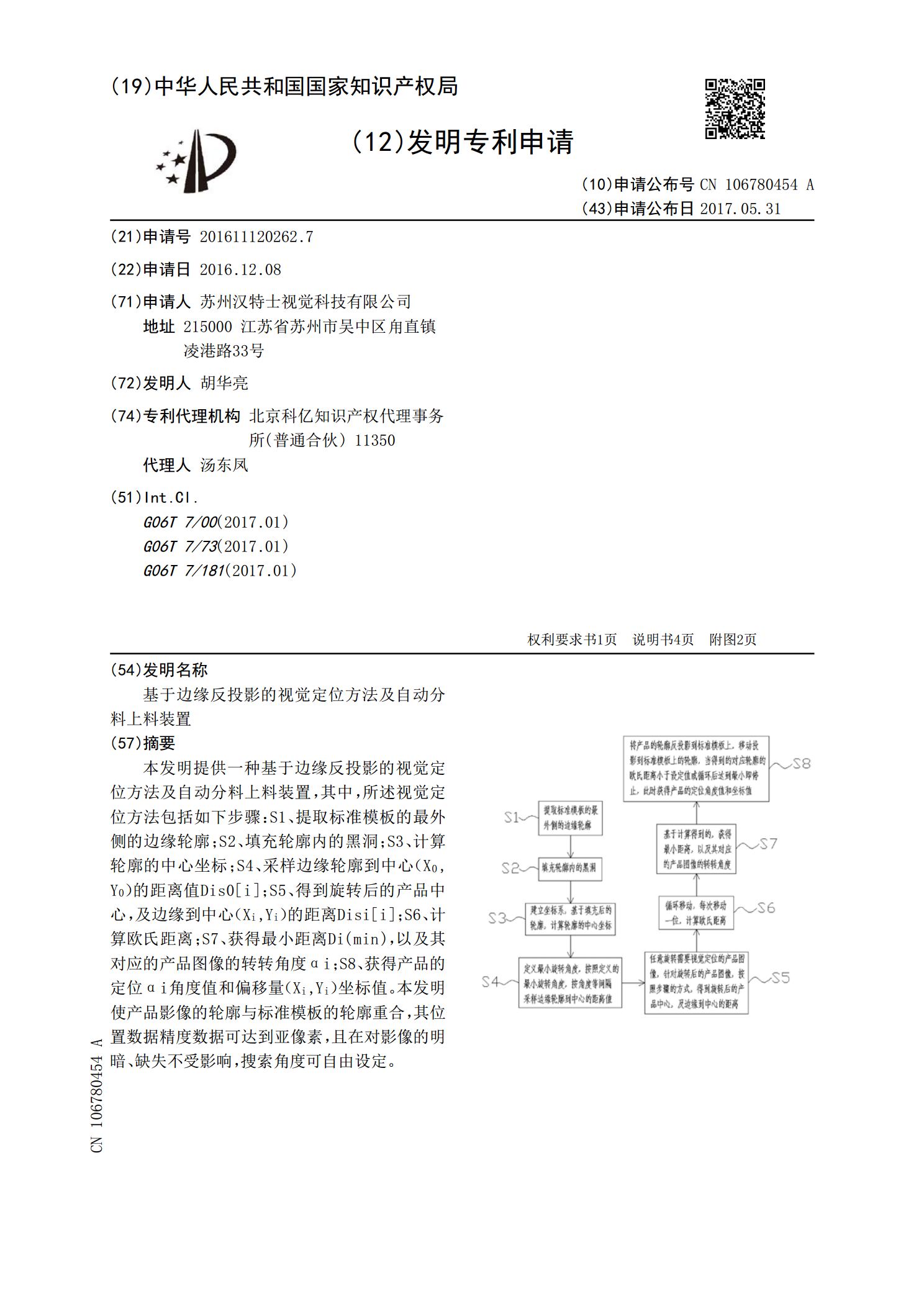
本发明提供一种基于边缘反投影的视觉定位方法及自动分料上料装置,其中,所述视觉定位方法包括如下步骤:S1、提取标准模板的最外侧的边缘轮廓;S2、填充轮廓内的黑洞;S3、计算轮廓的中心坐标;S4、采样边缘轮廓到中心(X

定位上料装置、定位上料方法及下料方法.pdf
本发明提出了一种定位上料装置、定位上料方法及下料方法。其中,定位上料装置包括托架、连杆和支座,支座和连杆铰接连接,连杆和托架铰接连接;并且装置还包括第一油缸组件和第二油缸组件;第一油缸组件包括相连接的第一油缸、与第一油缸相连接的第一油管、第二油管和第一活塞杆,第一活塞杆通过第一滚轮与托架活动接触;并且,第一油缸与连杆固定连接;第二油缸组件包括第二油缸、与第二油缸相连接的第三油管、第四油管和第二活塞杆,第二活塞杆通过第二滚轮与连杆活动接触。本发明采用液压油缸驱动连杆机构来完成零件的上料和下料的动作;相对于现
一种基于数控机床自动断料上料装置的断料上料方法.pdf
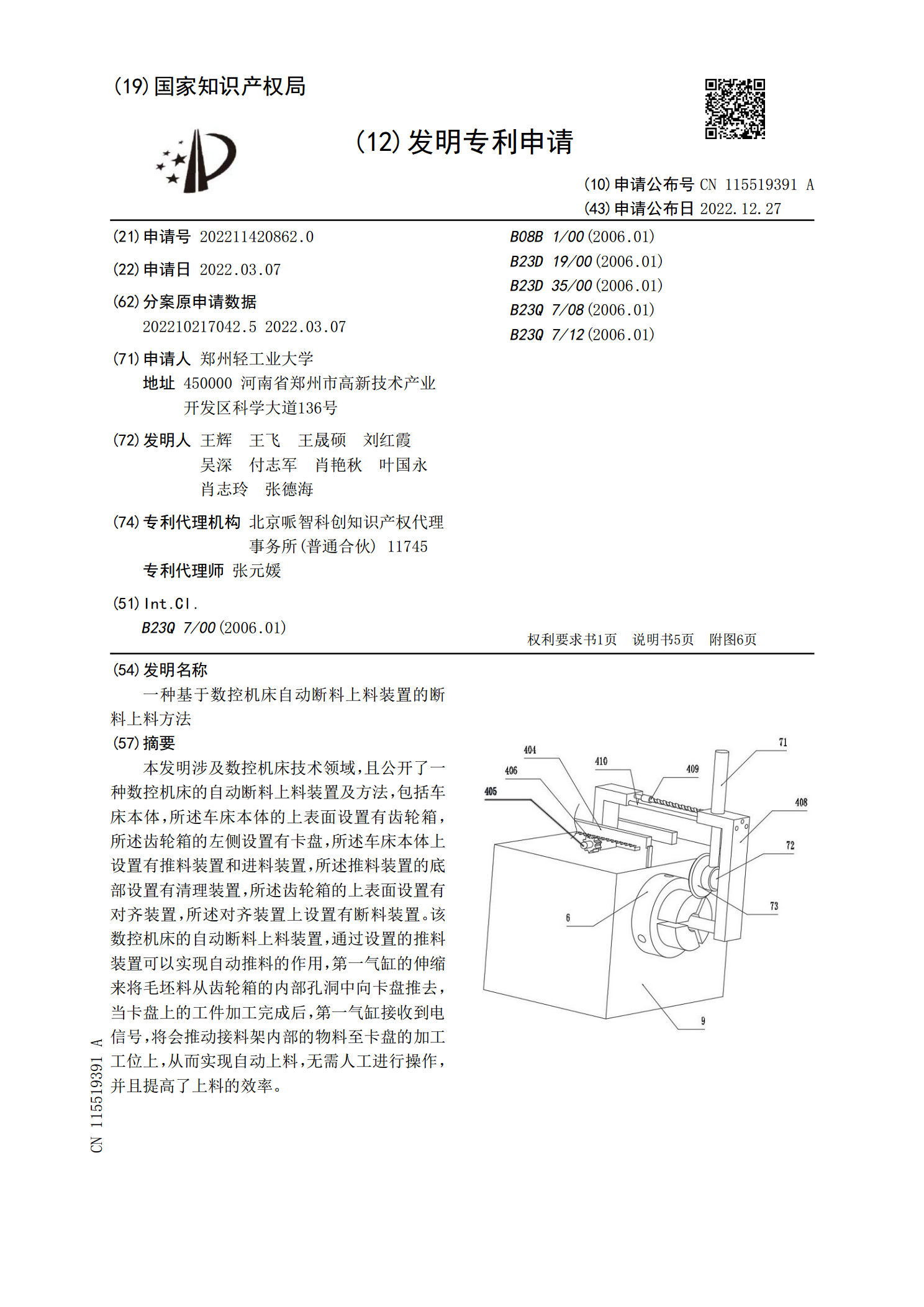
本发明涉及数控机床技术领域,且公开了一种数控机床的自动断料上料装置及方法,包括车床本体,所述车床本体的上表面设置有齿轮箱,所述齿轮箱的左侧设置有卡盘,所述车床本体上设置有推料装置和进料装置,所述推料装置的底部设置有清理装置,所述齿轮箱的上表面设置有对齐装置,所述对齐装置上设置有断料装置。该数控机床的自动断料上料装置,通过设置的推料装置可以实现自动推料的作用,第一气缸的伸缩来将毛坯料从齿轮箱的内部孔洞中向卡盘推去,当卡盘上的工件加工完成后,第一气缸接收到电信号,将会推动接料架内部的物料至卡盘的加工工位上,从
一种料框视觉定位引导自动装框的装置及方法.pdf
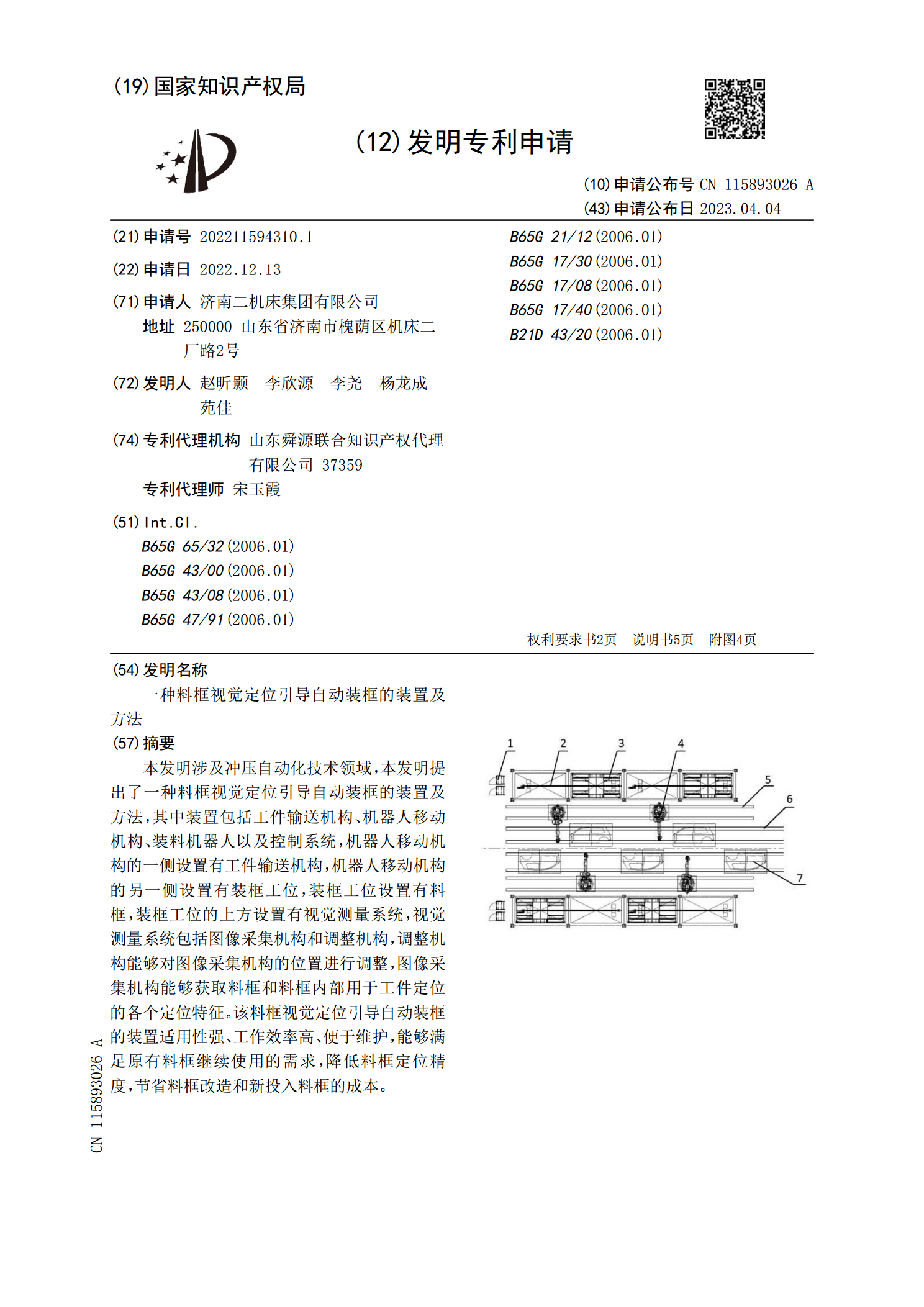
本发明涉及冲压自动化技术领域,本发明提出了一种料框视觉定位引导自动装框的装置及方法,其中装置包括工件输送机构、机器人移动机构、装料机器人以及控制系统,机器人移动机构的一侧设置有工件输送机构,机器人移动机构的另一侧设置有装框工位,装框工位设置有料框,装框工位的上方设置有视觉测量系统,视觉测量系统包括图像采集机构和调整机构,调整机构能够对图像采集机构的位置进行调整,图像采集机构能够获取料框和料框内部用于工件定位的各个定位特征。该料框视觉定位引导自动装框的装置适用性强、工作效率高、便于维护,能够满足原有料框继续

一种基于机器视觉的辅助上料装置及方法.pdf
本发明涉及机器视觉设备领域,尤其涉及一种基于机器视觉的辅助上料装置及方法。技术问题:现有电路板上料设备不会清理电路板所打孔洞的周围及内部会残留材料产生的细丝及颗粒物,导致电镀效果不佳,且无法针对电镀孔的规格及间距进行严格检测。技术方案如下:一种基于机器视觉的辅助上料装置,包括有机械手和上料检测系统等;机械手连接有上料检测系统。本发明利用视觉检测器配合幕板的成套工作,将光线发生器透射过电路板的光线进行分析,完成电路板通电孔规格的检测;刮板向上移动对通电孔洞周围的颗粒物及板材细丝清理,同时结合第二弹性伸缩件的