
一种基于工件内外轮廓几何特征的快速位姿检测方法.pdf

Ch****49


1/10

2/10

3/10
4/10
5/10

6/10
7/10
8/10
9/10
10/10
亲,该文档总共12页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种基于工件内外轮廓几何特征的快速位姿检测方法.pdf
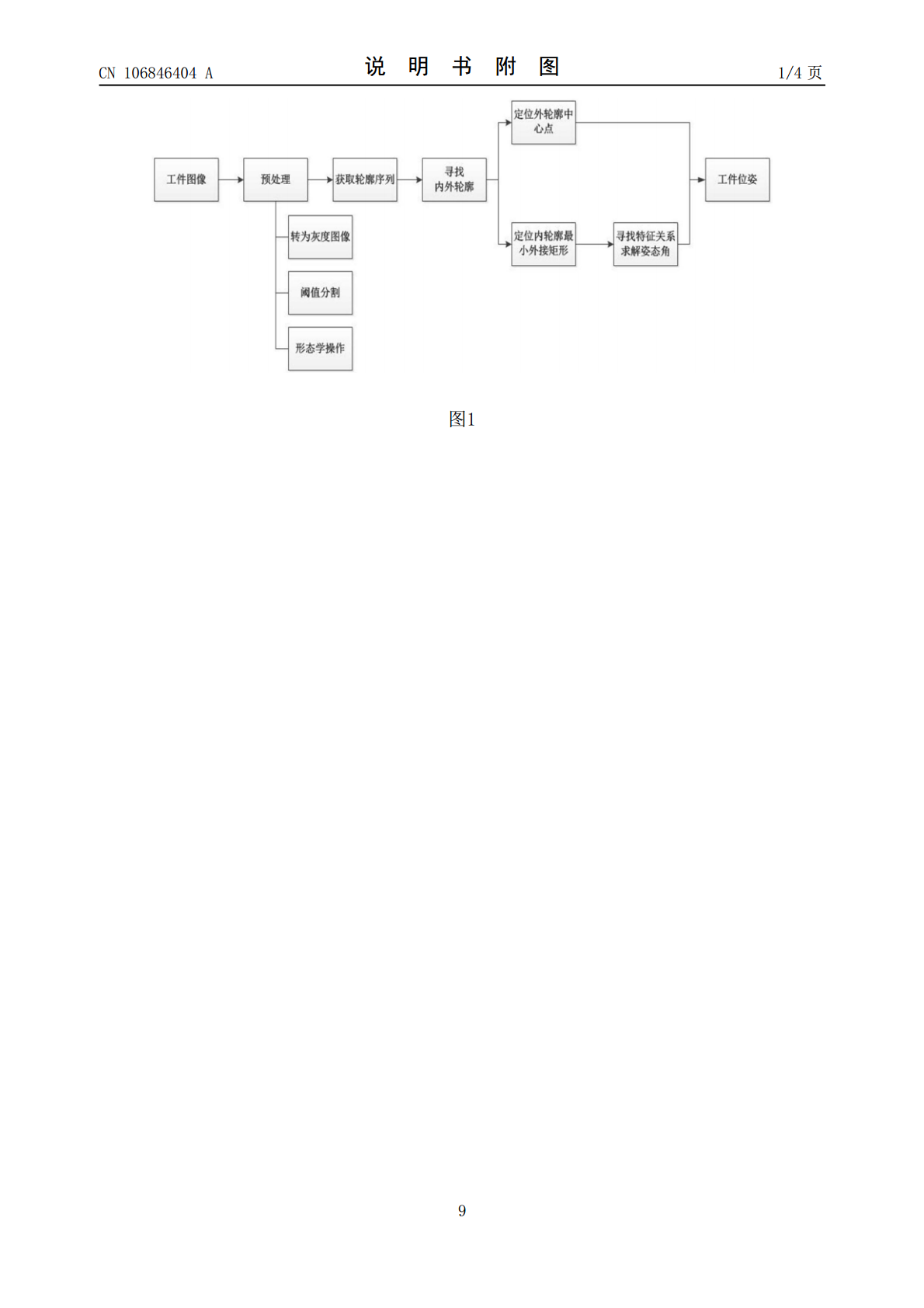
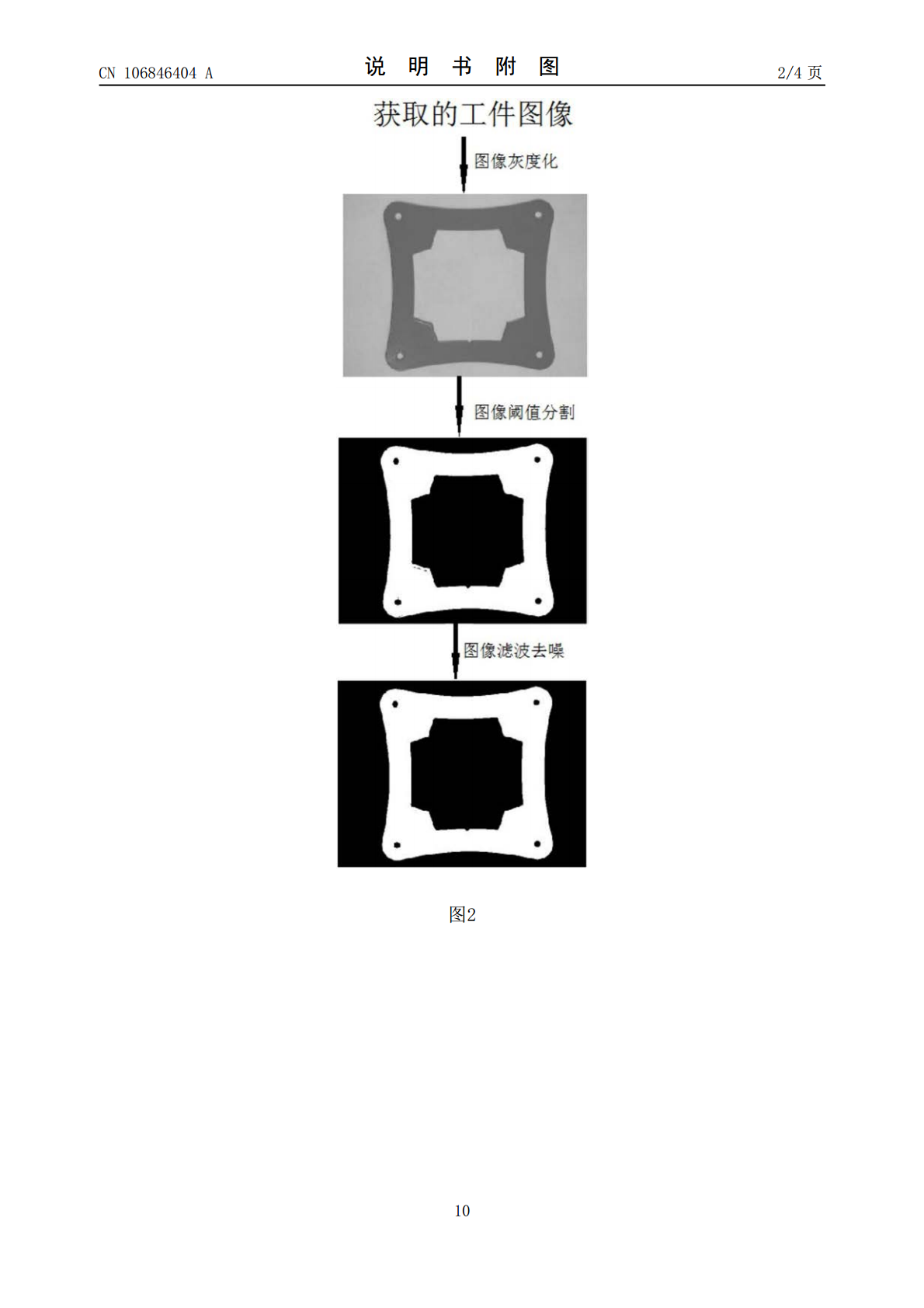
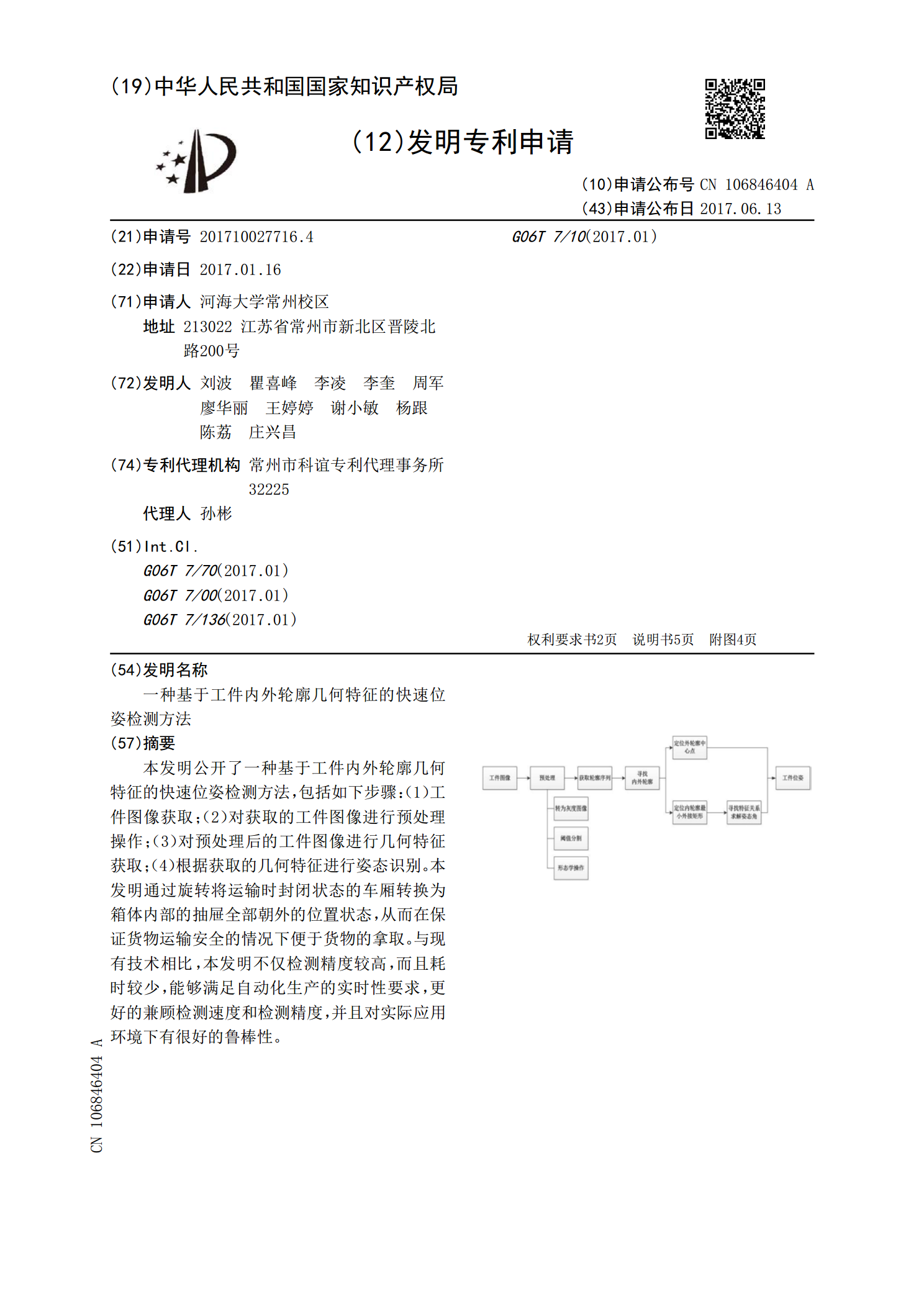
本发明公开了一种基于工件内外轮廓几何特征的快速位姿检测方法,包括如下步骤:(1)工件图像获取;(2)对获取的工件图像进行预处理操作;(3)对预处理后的工件图像进行几何特征获取;(4)根据获取的几何特征进行姿态识别。本发明通过旋转将运输时封闭状态的车厢转换为箱体内部的抽屉全部朝外的位置状态,从而在保证货物运输安全的情况下便于货物的拿取。与现有技术相比,本发明不仅检测精度较高,而且耗时较少,能够满足自动化生产的实时性要求,更好的兼顾检测速度和检测精度,并且对实际应用环境下有很好的鲁棒性。
一种基于轮廓特征的工件缺陷快速检测方法.pdf
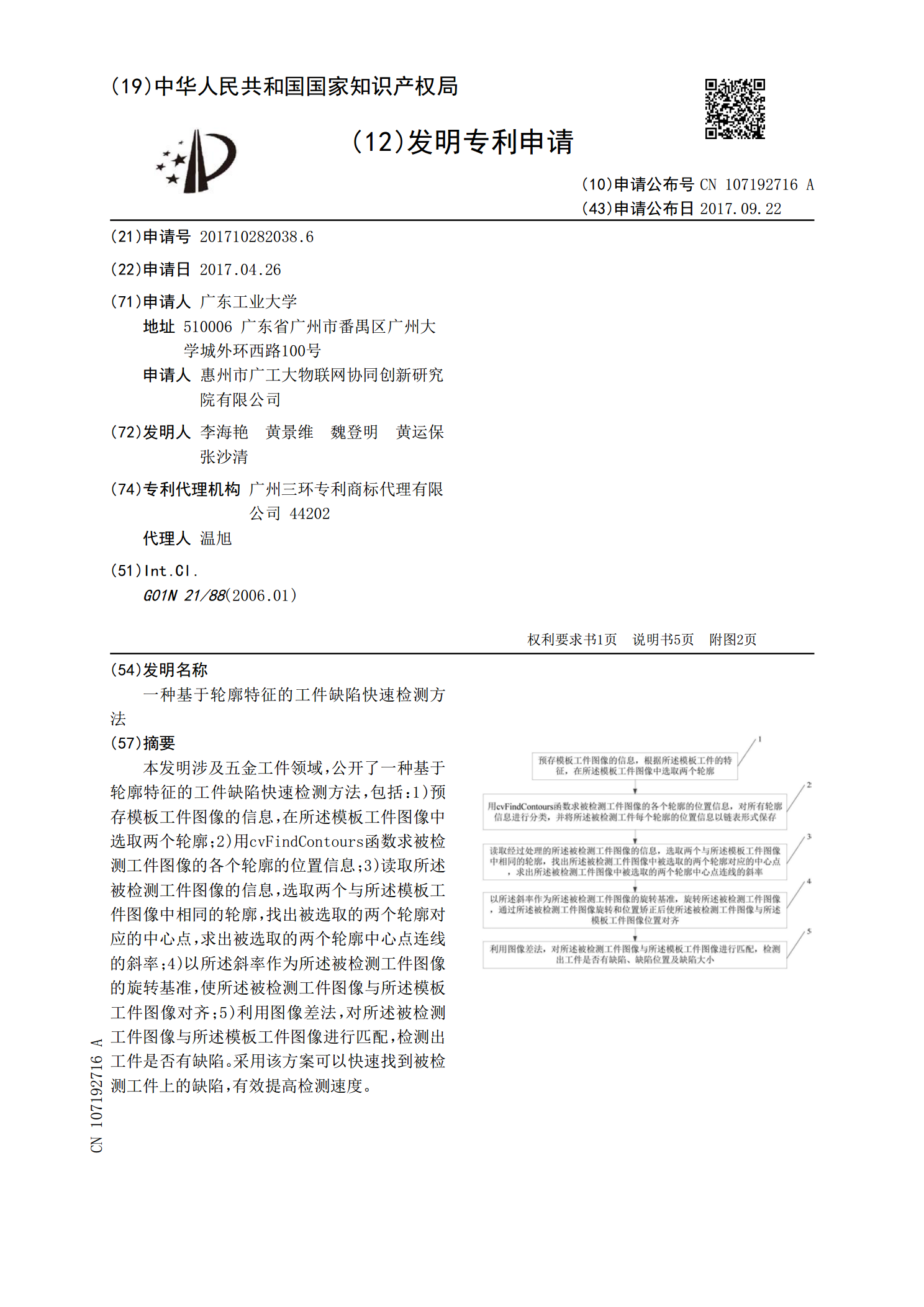
本发明涉及五金工件领域,公开了一种基于轮廓特征的工件缺陷快速检测方法,包括:1)预存模板工件图像的信息,在所述模板工件图像中选取两个轮廓;2)用cvFindContours函数求被检测工件图像的各个轮廓的位置信息;3)读取所述被检测工件图像的信息,选取两个与所述模板工件图像中相同的轮廓,找出被选取的两个轮廓对应的中心点,求出被选取的两个轮廓中心点连线的斜率;4)以所述斜率作为所述被检测工件图像的旋转基准,使所述被检测工件图像与所述模板工件图像对齐;5)利用图像差法,对所述被检测工件图像与所述模板工件图像进
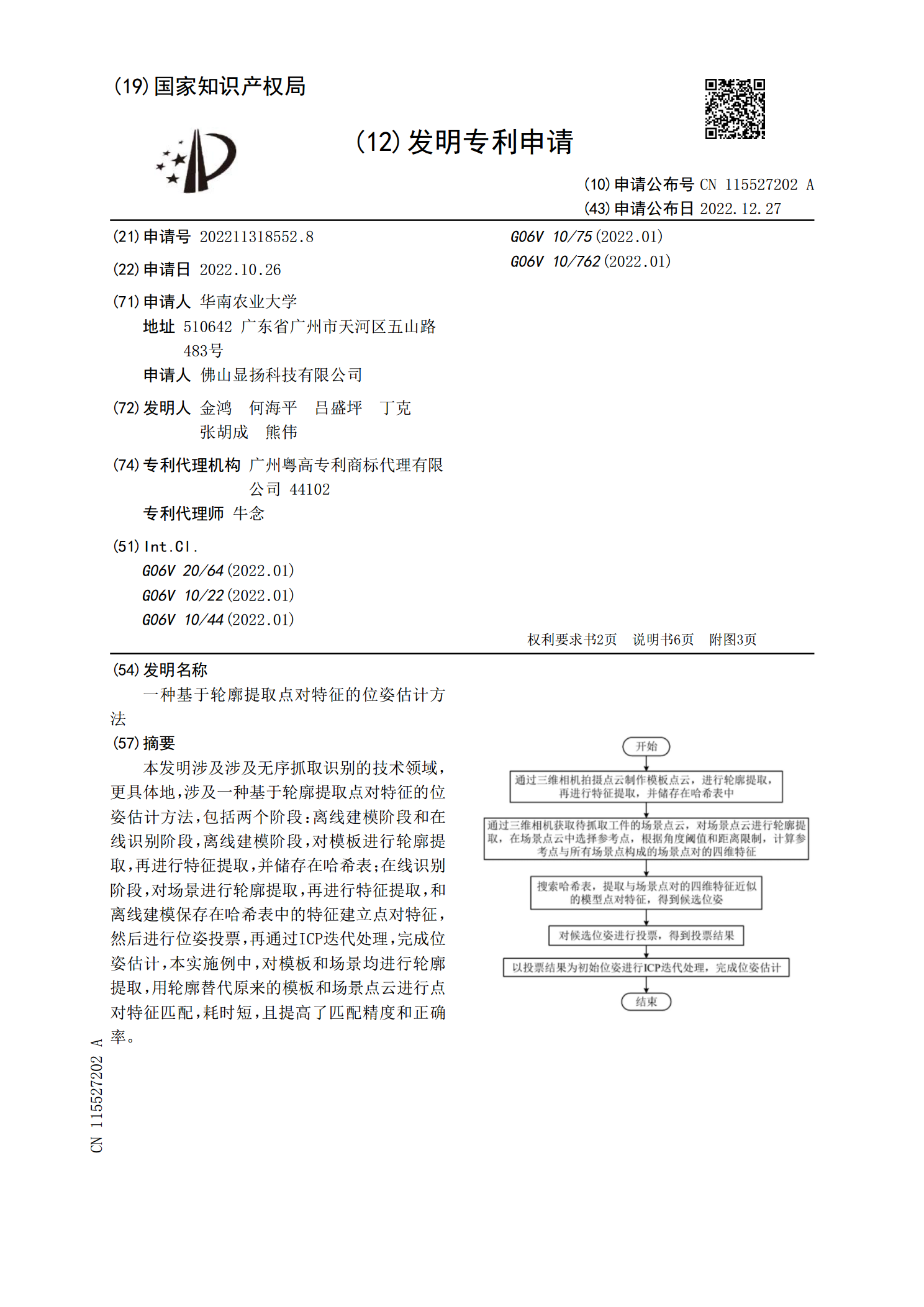
一种基于轮廓提取点对特征的位姿估计方法.pdf
本发明涉及涉及无序抓取识别的技术领域,更具体地,涉及一种基于轮廓提取点对特征的位姿估计方法,包括两个阶段:离线建模阶段和在线识别阶段,离线建模阶段,对模板进行轮廓提取,再进行特征提取,并储存在哈希表;在线识别阶段,对场景进行轮廓提取,再进行特征提取,和离线建模保存在哈希表中的特征建立点对特征,然后进行位姿投票,再通过ICP迭代处理,完成位姿估计,本实施例中,对模板和场景均进行轮廓提取,用轮廓替代原来的模板和场景点云进行点对特征匹配,耗时短,且提高了匹配精度和正确率。
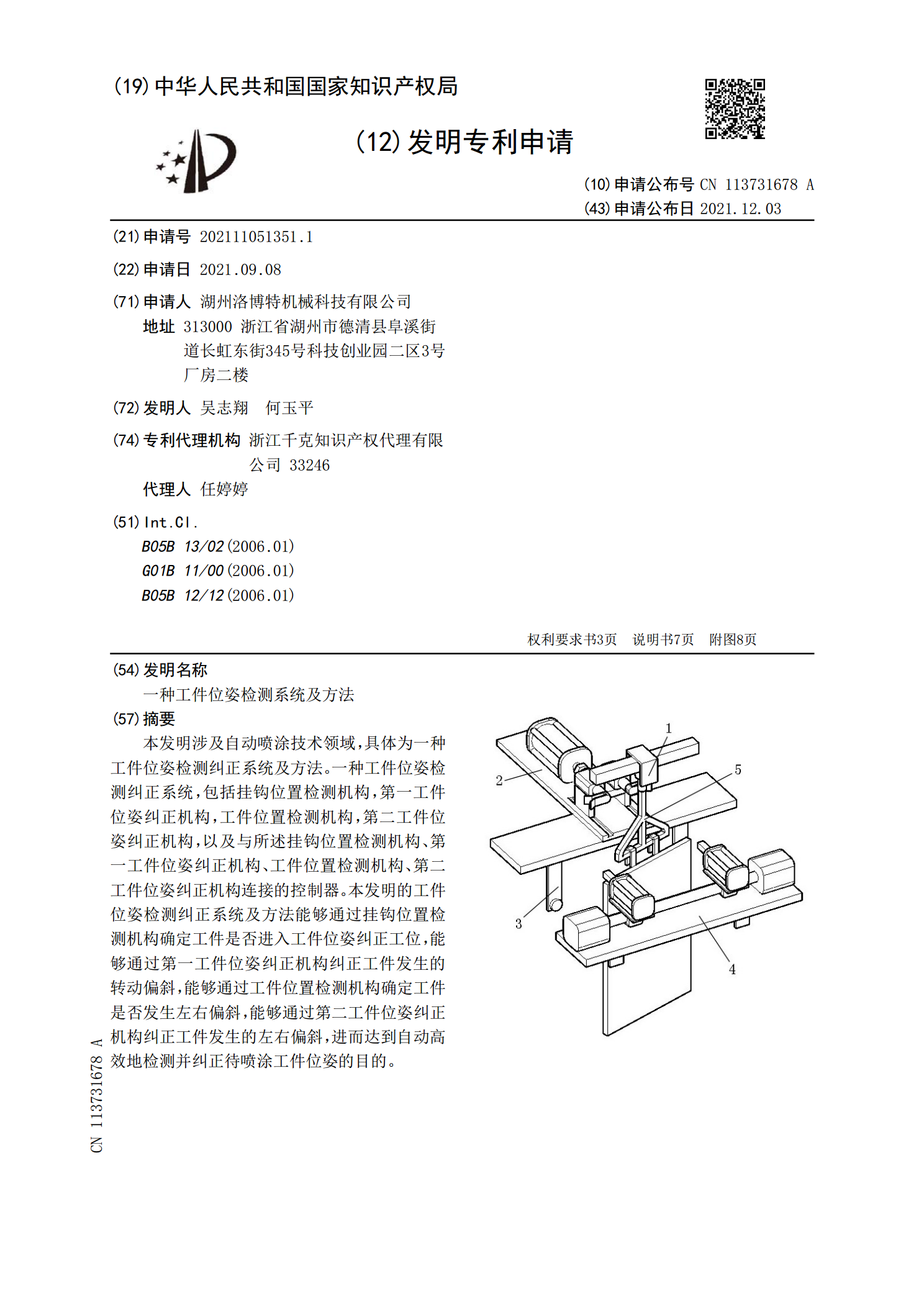
一种工件位姿检测系统及方法.pdf
本发明涉及自动喷涂技术领域,具体为一种工件位姿检测纠正系统及方法。一种工件位姿检测纠正系统,包括挂钩位置检测机构,第一工件位姿纠正机构,工件位置检测机构,第二工件位姿纠正机构,以及与所述挂钩位置检测机构、第一工件位姿纠正机构、工件位置检测机构、第二工件位姿纠正机构连接的控制器。本发明的工件位姿检测纠正系统及方法能够通过挂钩位置检测机构确定工件是否进入工件位姿纠正工位,能够通过第一工件位姿纠正机构纠正工件发生的转动偏斜,能够通过工件位置检测机构确定工件是否发生左右偏斜,能够通过第二工件位姿纠正机构纠正工件发
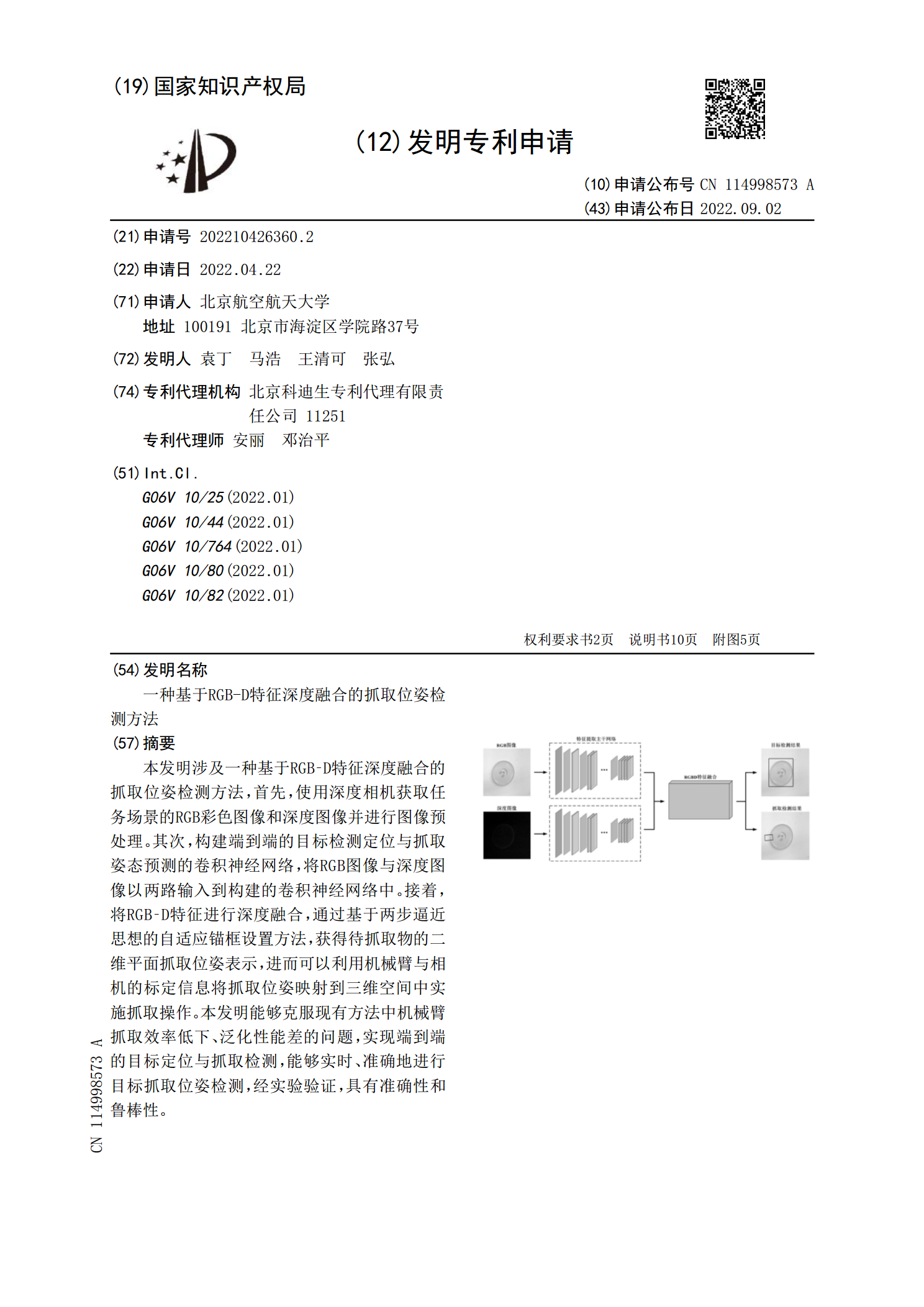
一种基于RGB-D特征深度融合的抓取位姿检测方法.pdf
本发明涉及一种基于RGB‑D特征深度融合的抓取位姿检测方法,首先,使用深度相机获取任务场景的RGB彩色图像和深度图像并进行图像预处理。其次,构建端到端的目标检测定位与抓取姿态预测的卷积神经网络,将RGB图像与深度图像以两路输入到构建的卷积神经网络中。接着,将RGB‑D特征进行深度融合,通过基于两步逼近思想的自适应锚框设置方法,获得待抓取物的二维平面抓取位姿表示,进而可以利用机械臂与相机的标定信息将抓取位姿映射到三维空间中实施抓取操作。本发明能够克服现有方法中机械臂抓取效率低下、泛化性能差的问题,实现端到端