
一种基于轮廓提取点对特征的位姿估计方法.pdf

书生****aa

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10

9/10
10/10
亲,该文档总共12页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种基于轮廓提取点对特征的位姿估计方法.pdf
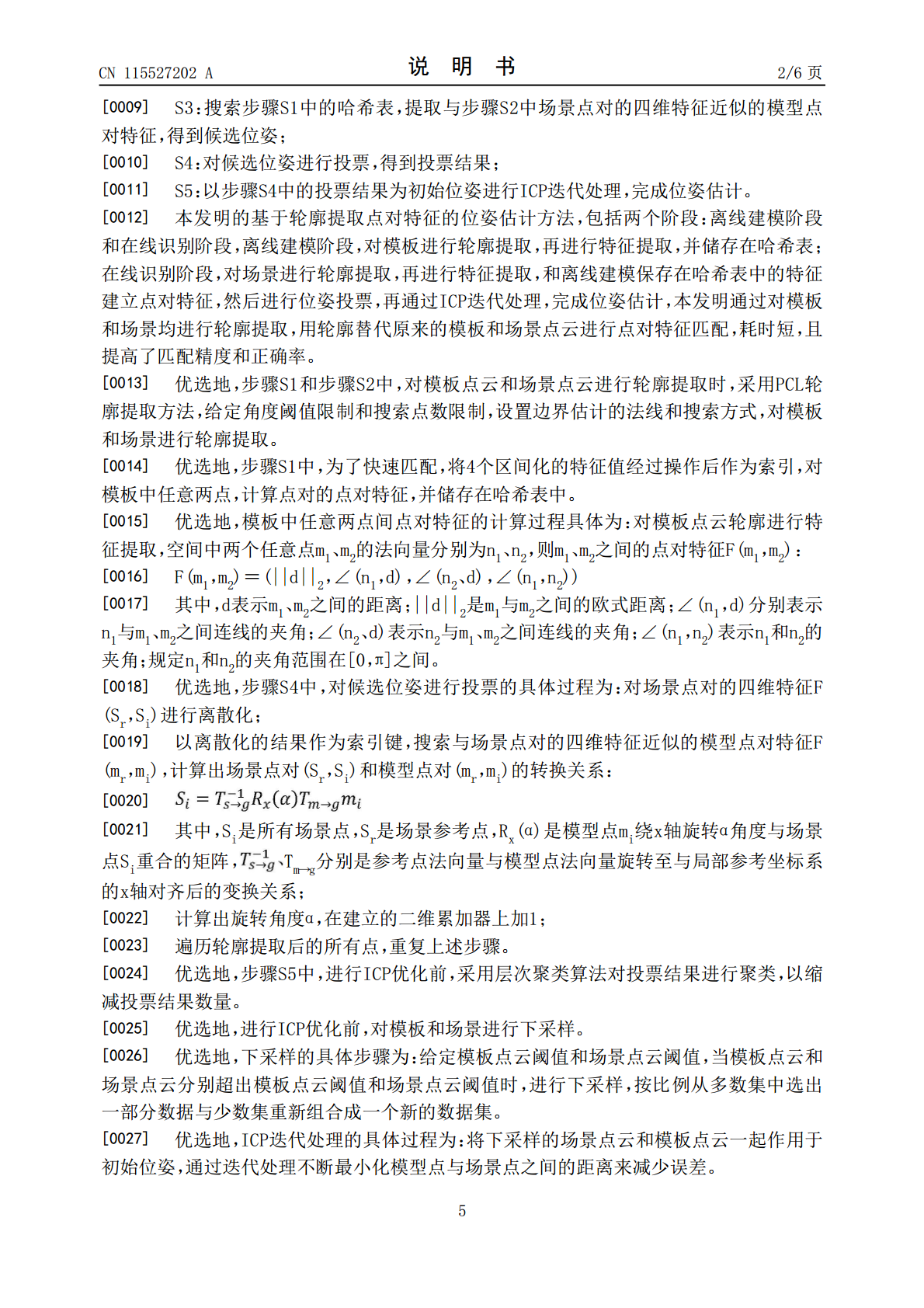
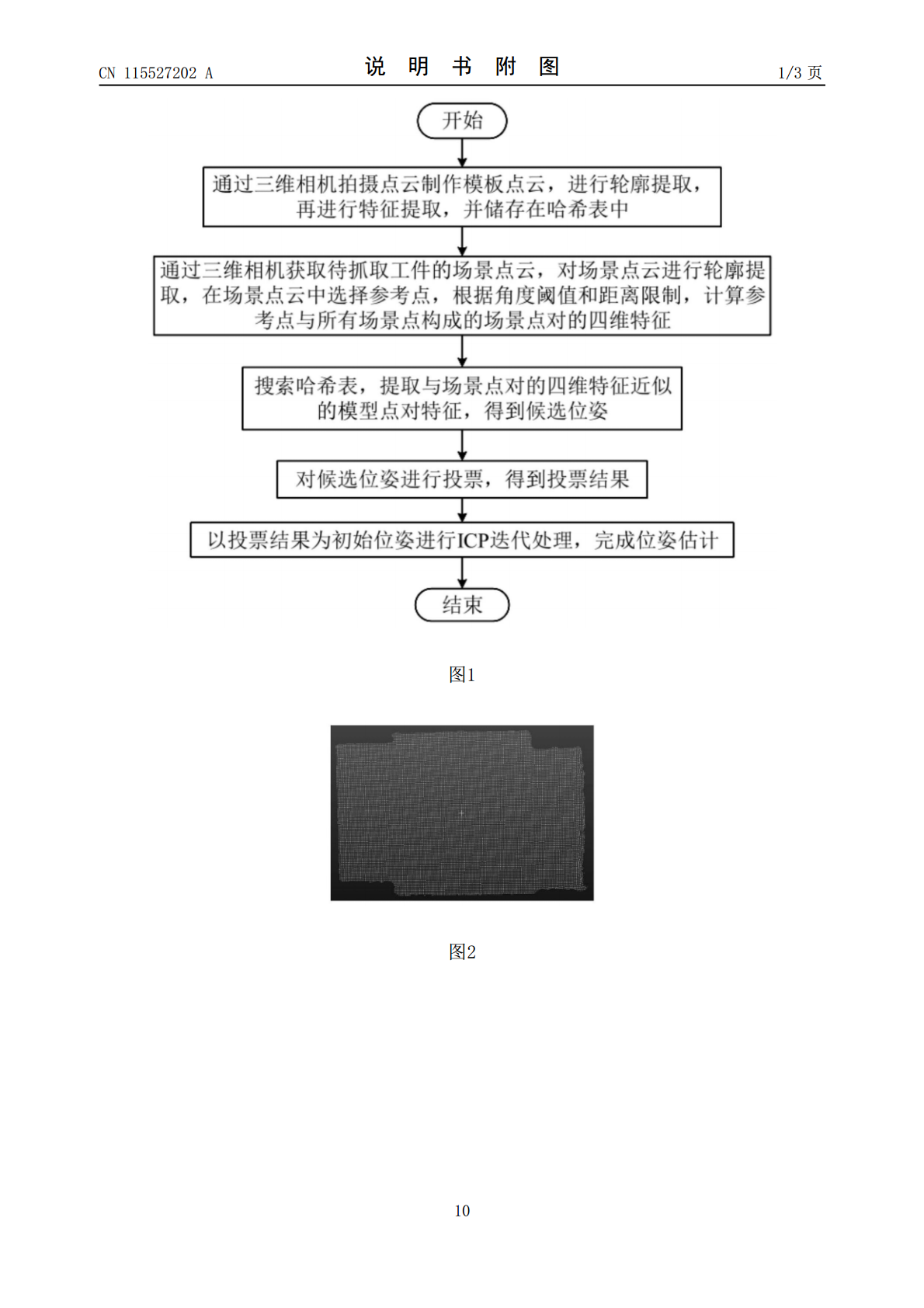
本发明涉及涉及无序抓取识别的技术领域,更具体地,涉及一种基于轮廓提取点对特征的位姿估计方法,包括两个阶段:离线建模阶段和在线识别阶段,离线建模阶段,对模板进行轮廓提取,再进行特征提取,并储存在哈希表;在线识别阶段,对场景进行轮廓提取,再进行特征提取,和离线建模保存在哈希表中的特征建立点对特征,然后进行位姿投票,再通过ICP迭代处理,完成位姿估计,本实施例中,对模板和场景均进行轮廓提取,用轮廓替代原来的模板和场景点云进行点对特征匹配,耗时短,且提高了匹配精度和正确率。

基于特征点对的位姿估计方法研究的综述报告.docx
基于特征点对的位姿估计方法研究的综述报告特征点对是计算机视觉中广泛使用的一种简单而有效的方法,用于位姿估计、目标检测、匹配等领域。在本篇综述中,我们将主要探讨基于特征点对的位姿估计方法的研究进展和应用。一、特征点对的定义和分类特征点对是指从图像中提取出来的具有独特性质和描述性特征的图像点对,通常被用于描述图像中的目标物体。常见的特征点对包括图像中的角点、边缘、斑块等。特征点对的分类可以按照特征点的类别、选择和匹配的方式等多种角度进行。按照特征点的类别来看,可分为SIFT、SURF、ORB等几种类型。按照选
一种基于轮廓上曲率估计的图像特征点提取方法.pdf
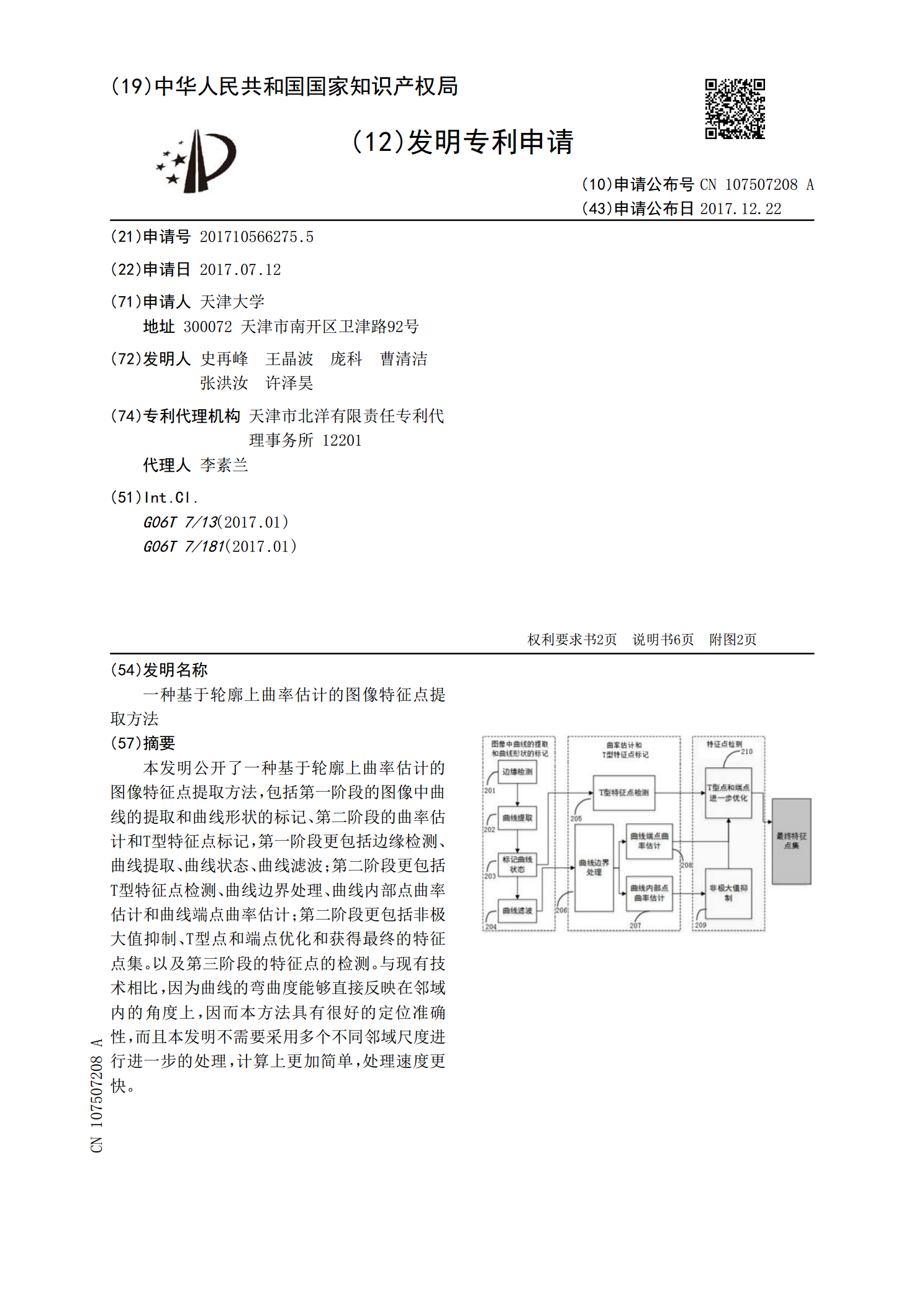
本发明公开了一种基于轮廓上曲率估计的图像特征点提取方法,包括第一阶段的图像中曲线的提取和曲线形状的标记、第二阶段的曲率估计和T型特征点标记,第一阶段更包括边缘检测、曲线提取、曲线状态、曲线滤波;第二阶段更包括T型特征点检测、曲线边界处理、曲线内部点曲率估计和曲线端点曲率估计;第二阶段更包括非极大值抑制、T型点和端点优化和获得最终的特征点集。以及第三阶段的特征点的检测。与现有技术相比,因为曲线的弯曲度能够直接反映在邻域内的角度上,因而本方法具有很好的定位准确性,而且本发明不需要采用多个不同邻域尺度进行进一步
一种基于工件内外轮廓几何特征的快速位姿检测方法.pdf
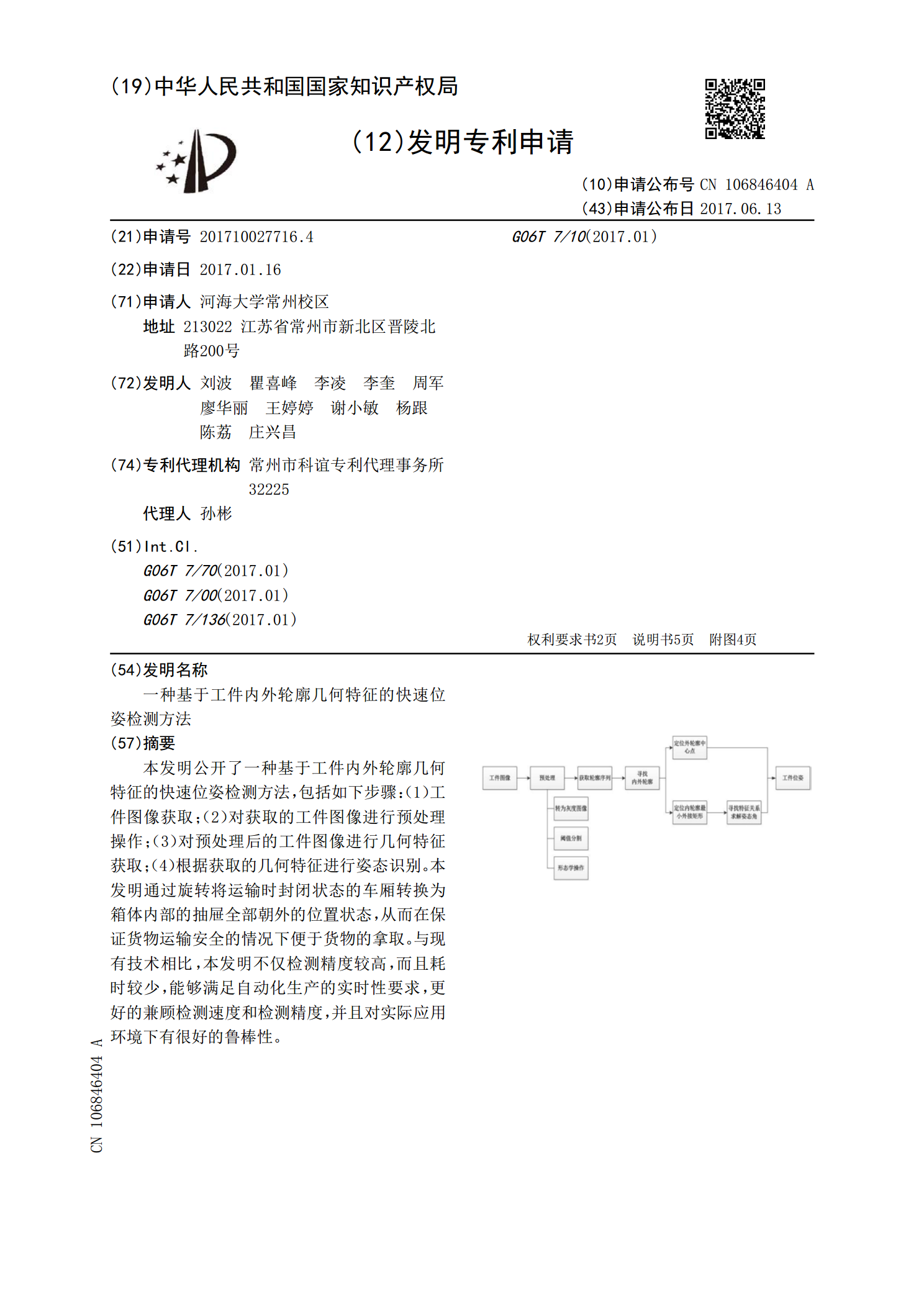
本发明公开了一种基于工件内外轮廓几何特征的快速位姿检测方法,包括如下步骤:(1)工件图像获取;(2)对获取的工件图像进行预处理操作;(3)对预处理后的工件图像进行几何特征获取;(4)根据获取的几何特征进行姿态识别。本发明通过旋转将运输时封闭状态的车厢转换为箱体内部的抽屉全部朝外的位置状态,从而在保证货物运输安全的情况下便于货物的拿取。与现有技术相比,本发明不仅检测精度较高,而且耗时较少,能够满足自动化生产的实时性要求,更好的兼顾检测速度和检测精度,并且对实际应用环境下有很好的鲁棒性。

一种利用轮廓信息的6D位姿估计方法.pdf
本发明提供了一种利用轮廓信息的6D位姿估计方法,包括:基于卷积神经网络设计目标物体6D位姿估计网络;采集和标注不同背景、角度和姿态的目标物体训练样本图片构建数据集,并对训练样本进行数据增强;对目标物体6D位姿估计网络进行训练,得到网络参数模型;调用目标物体6D位姿估计网络参数模型对目标物体图片进行预测,得到目标物体关键点二维投影坐标;由目标物体关键点二维投影坐标,利用EPnP计算出目标物体6D位姿。本发明方法在不需要位姿修正后处理的情况下,通过所设计的6D位姿估计网络,利用目标物体的轮廓信息快速准确地检测