
一种基于轮廓特征的工件缺陷快速检测方法.pdf

Ch****75

1/9
2/9
3/9
4/9

5/9
6/9

7/9
8/9
9/9
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种基于轮廓特征的工件缺陷快速检测方法.pdf
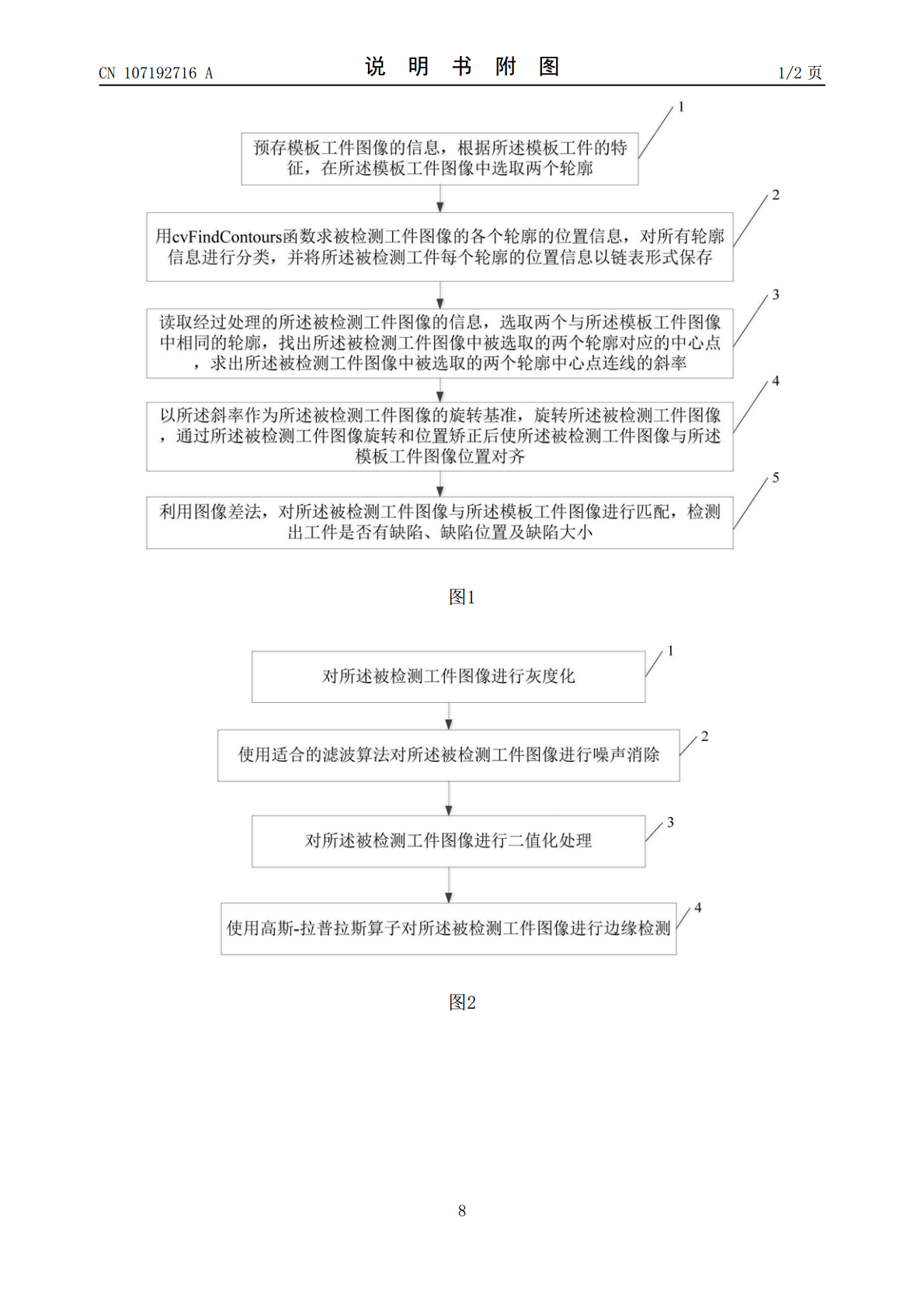
本发明涉及五金工件领域,公开了一种基于轮廓特征的工件缺陷快速检测方法,包括:1)预存模板工件图像的信息,在所述模板工件图像中选取两个轮廓;2)用cvFindContours函数求被检测工件图像的各个轮廓的位置信息;3)读取所述被检测工件图像的信息,选取两个与所述模板工件图像中相同的轮廓,找出被选取的两个轮廓对应的中心点,求出被选取的两个轮廓中心点连线的斜率;4)以所述斜率作为所述被检测工件图像的旋转基准,使所述被检测工件图像与所述模板工件图像对齐;5)利用图像差法,对所述被检测工件图像与所述模板工件图像进
一种基于工件内外轮廓几何特征的快速位姿检测方法.pdf
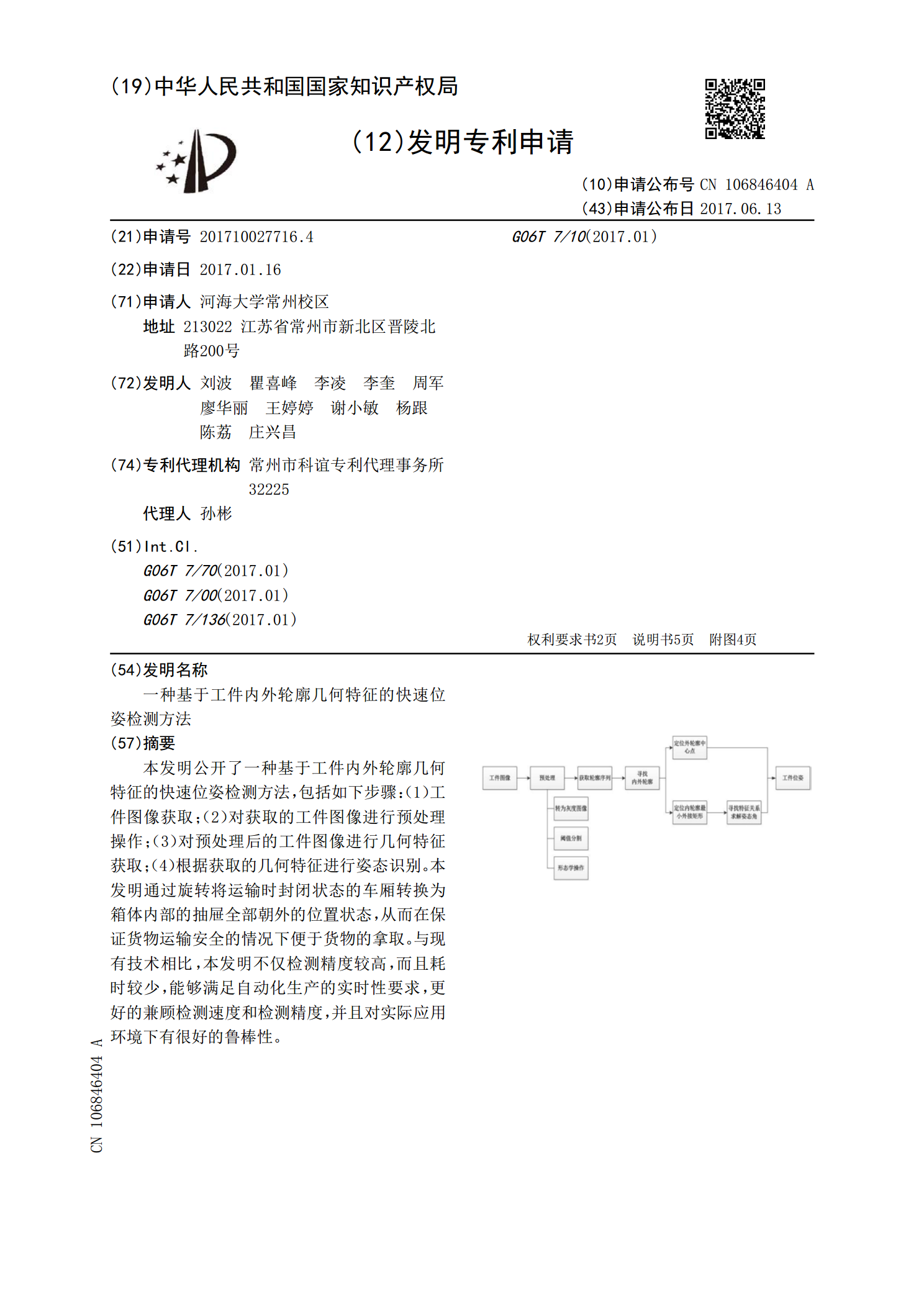
本发明公开了一种基于工件内外轮廓几何特征的快速位姿检测方法,包括如下步骤:(1)工件图像获取;(2)对获取的工件图像进行预处理操作;(3)对预处理后的工件图像进行几何特征获取;(4)根据获取的几何特征进行姿态识别。本发明通过旋转将运输时封闭状态的车厢转换为箱体内部的抽屉全部朝外的位置状态,从而在保证货物运输安全的情况下便于货物的拿取。与现有技术相比,本发明不仅检测精度较高,而且耗时较少,能够满足自动化生产的实时性要求,更好的兼顾检测速度和检测精度,并且对实际应用环境下有很好的鲁棒性。
基于轮廓检测和特征匹配的LCD缺陷检测方法.pdf
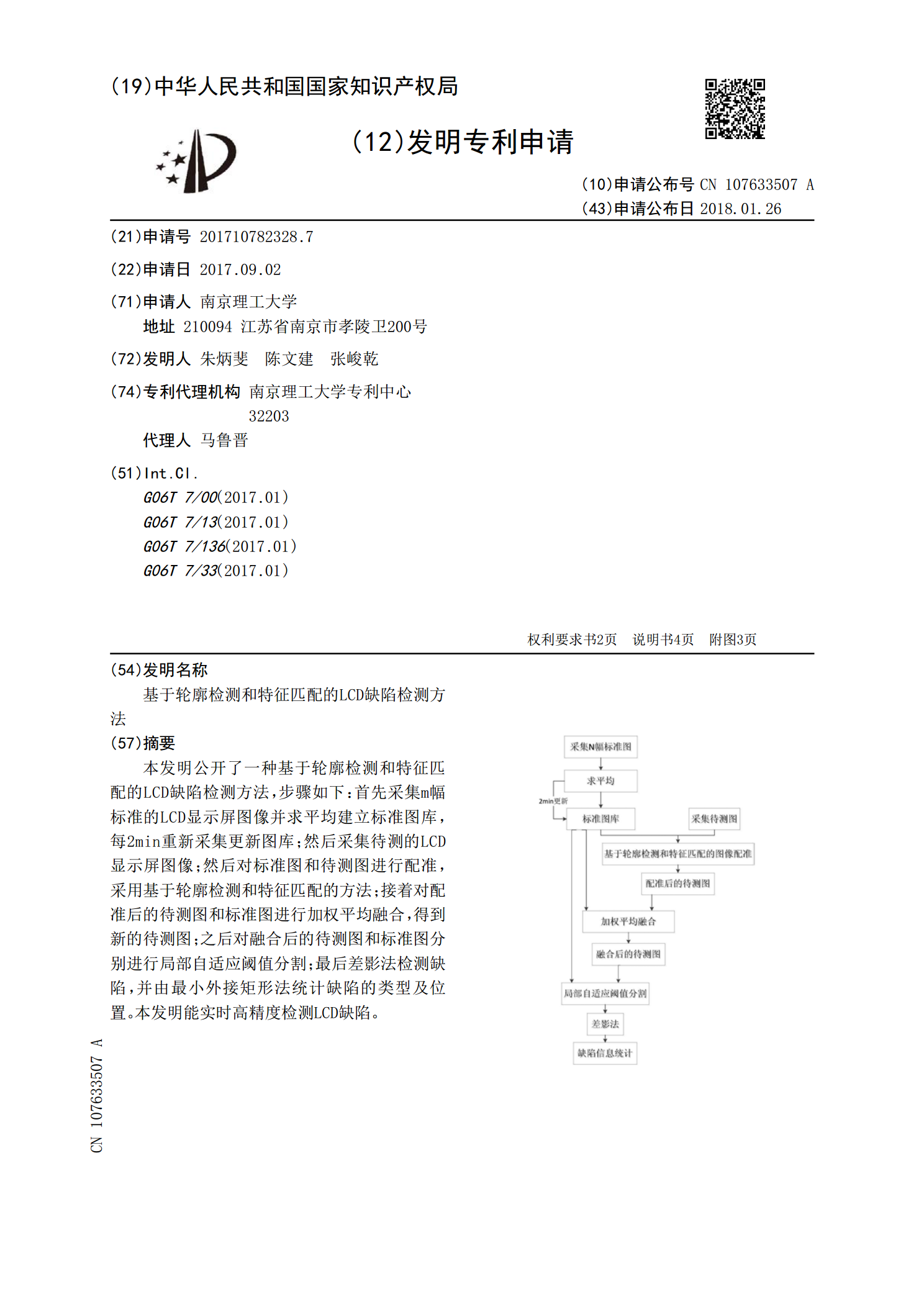
本发明公开了一种基于轮廓检测和特征匹配的LCD缺陷检测方法,步骤如下:首先采集m幅标准的LCD显示屏图像并求平均建立标准图库,每2min重新采集更新图库;然后采集待测的LCD显示屏图像;然后对标准图和待测图进行配准,采用基于轮廓检测和特征匹配的方法;接着对配准后的待测图和标准图进行加权平均融合,得到新的待测图;之后对融合后的待测图和标准图分别进行局部自适应阈值分割;最后差影法检测缺陷,并由最小外接矩形法统计缺陷的类型及位置。本发明能实时高精度检测LCD缺陷。
基于复杂工件外轮廓配准的侧表面缺陷检测方法及系统.pdf
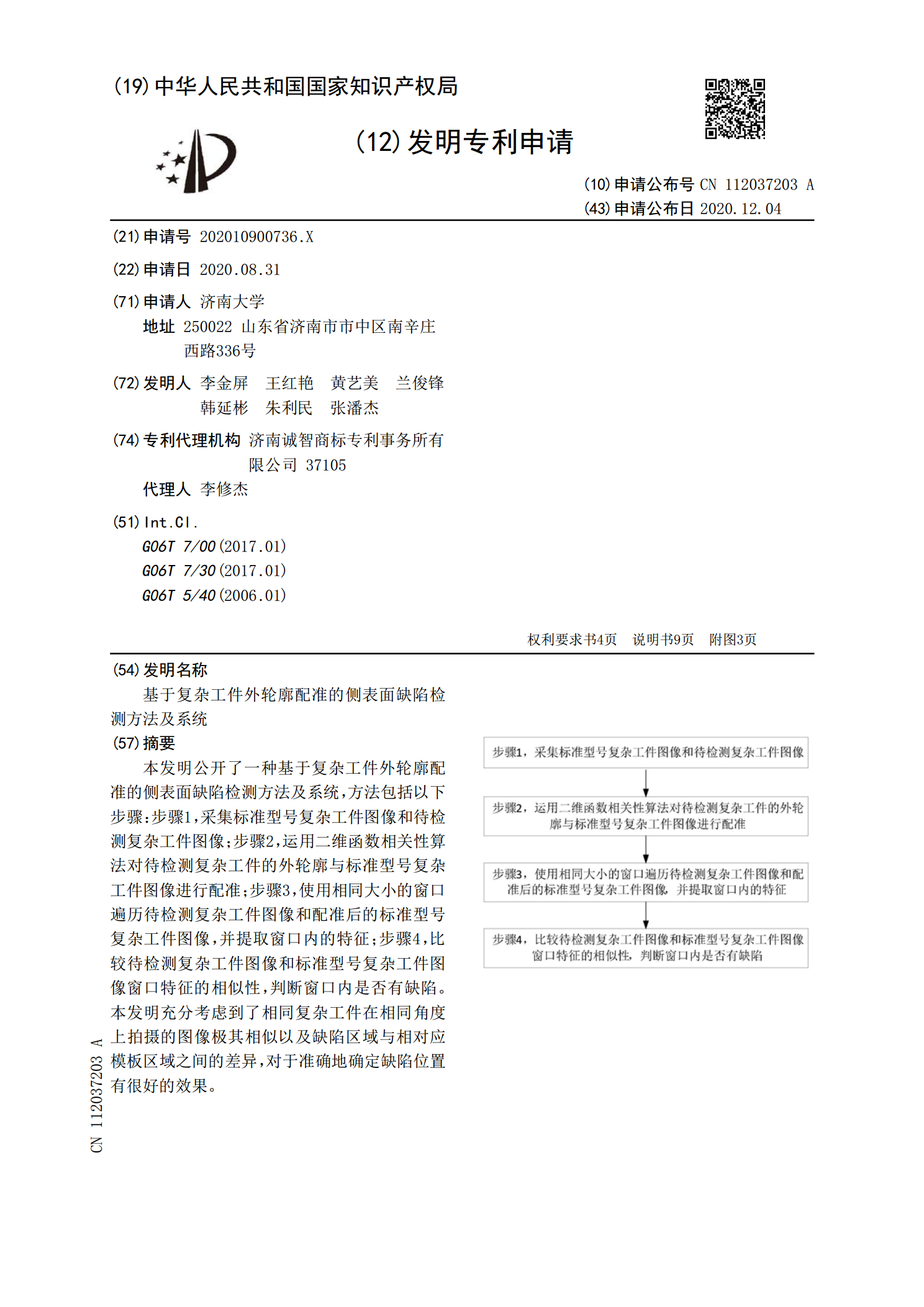
本发明公开了一种基于复杂工件外轮廓配准的侧表面缺陷检测方法及系统,方法包括以下步骤:步骤1,采集标准型号复杂工件图像和待检测复杂工件图像;步骤2,运用二维函数相关性算法对待检测复杂工件的外轮廓与标准型号复杂工件图像进行配准;步骤3,使用相同大小的窗口遍历待检测复杂工件图像和配准后的标准型号复杂工件图像,并提取窗口内的特征;步骤4,比较待检测复杂工件图像和标准型号复杂工件图像窗口特征的相似性,判断窗口内是否有缺陷。本发明充分考虑到了相同复杂工件在相同角度上拍摄的图像极其相似以及缺陷区域与相对应模板区域之间的
一种基于异常检测的工件表面缺陷检测方法.pdf
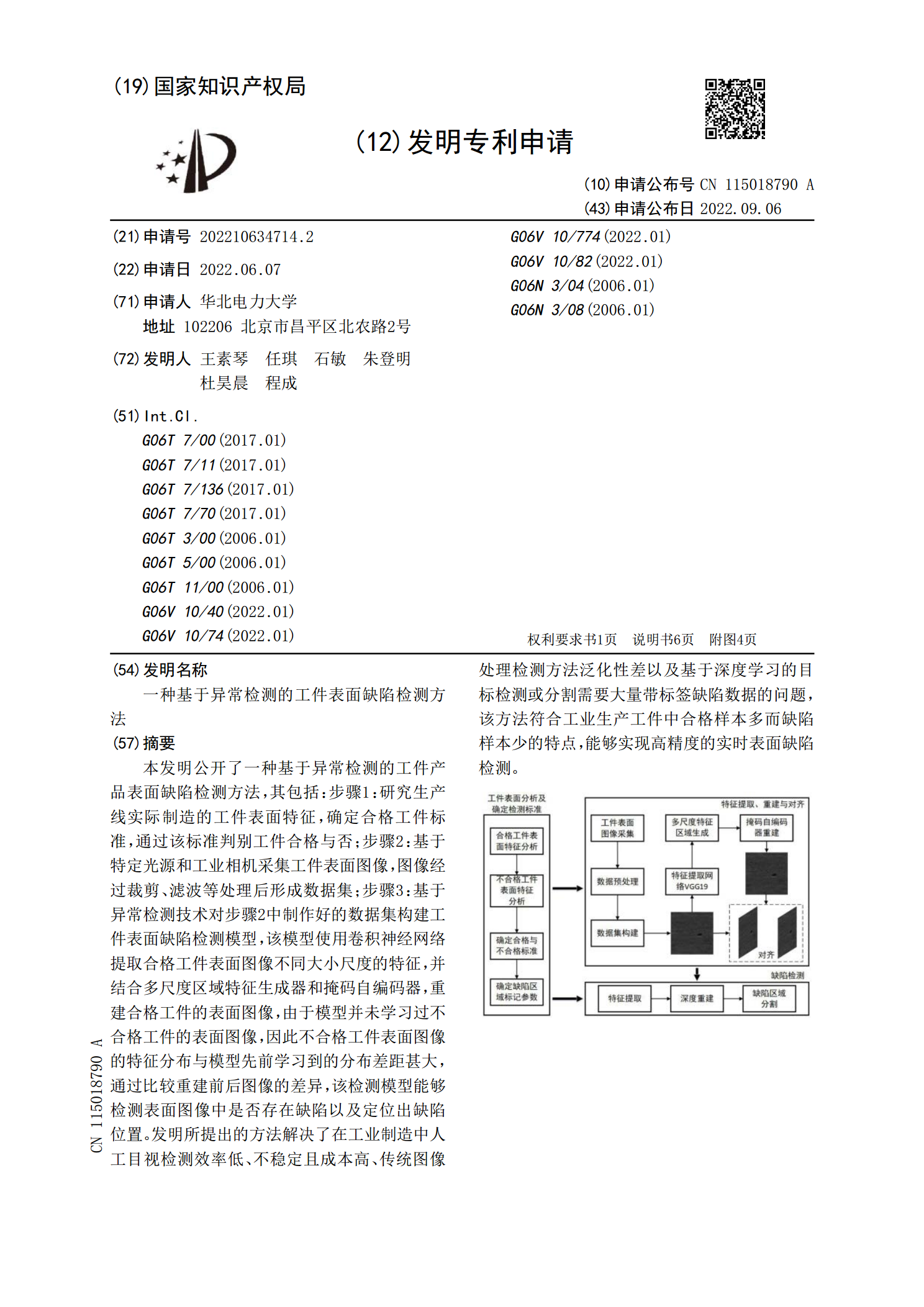
本发明公开了一种基于异常检测的工件产品表面缺陷检测方法,其包括:步骤1:研究生产线实际制造的工件表面特征,确定合格工件标准,通过该标准判别工件合格与否;步骤2:基于特定光源和工业相机采集工件表面图像,图像经过裁剪、滤波等处理后形成数据集;步骤3:基于异常检测技术对步骤2中制作好的数据集构建工件表面缺陷检测模型,该模型使用卷积神经网络提取合格工件表面图像不同大小尺度的特征,并结合多尺度区域特征生成器和掩码自编码器,重建合格工件的表面图像,由于模型并未学习过不合格工件的表面图像,因此不合格工件表面图像的特征分