
一种基于RGB-D特征深度融合的抓取位姿检测方法.pdf

永香****能手

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共18页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种基于RGB-D特征深度融合的抓取位姿检测方法.pdf
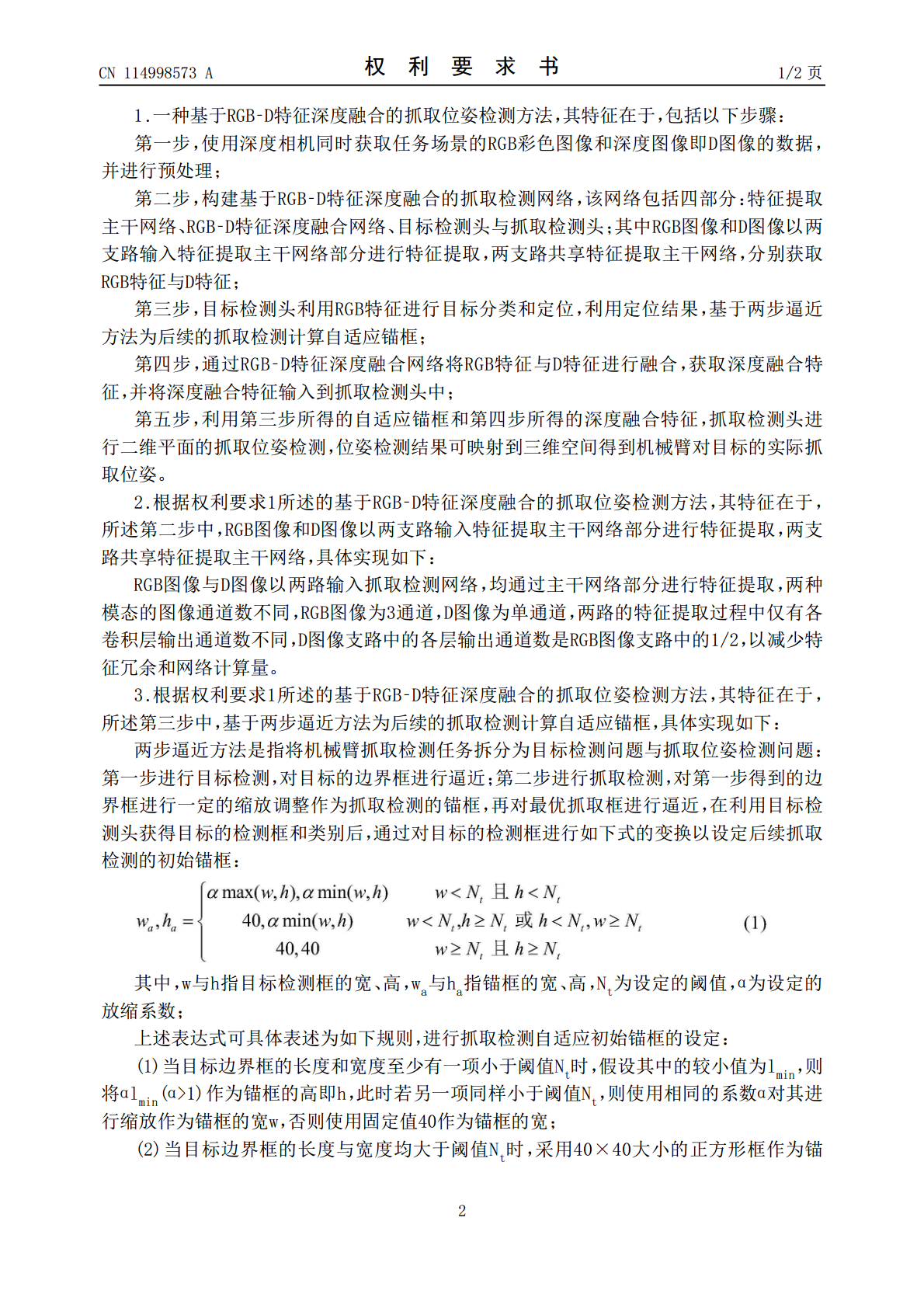
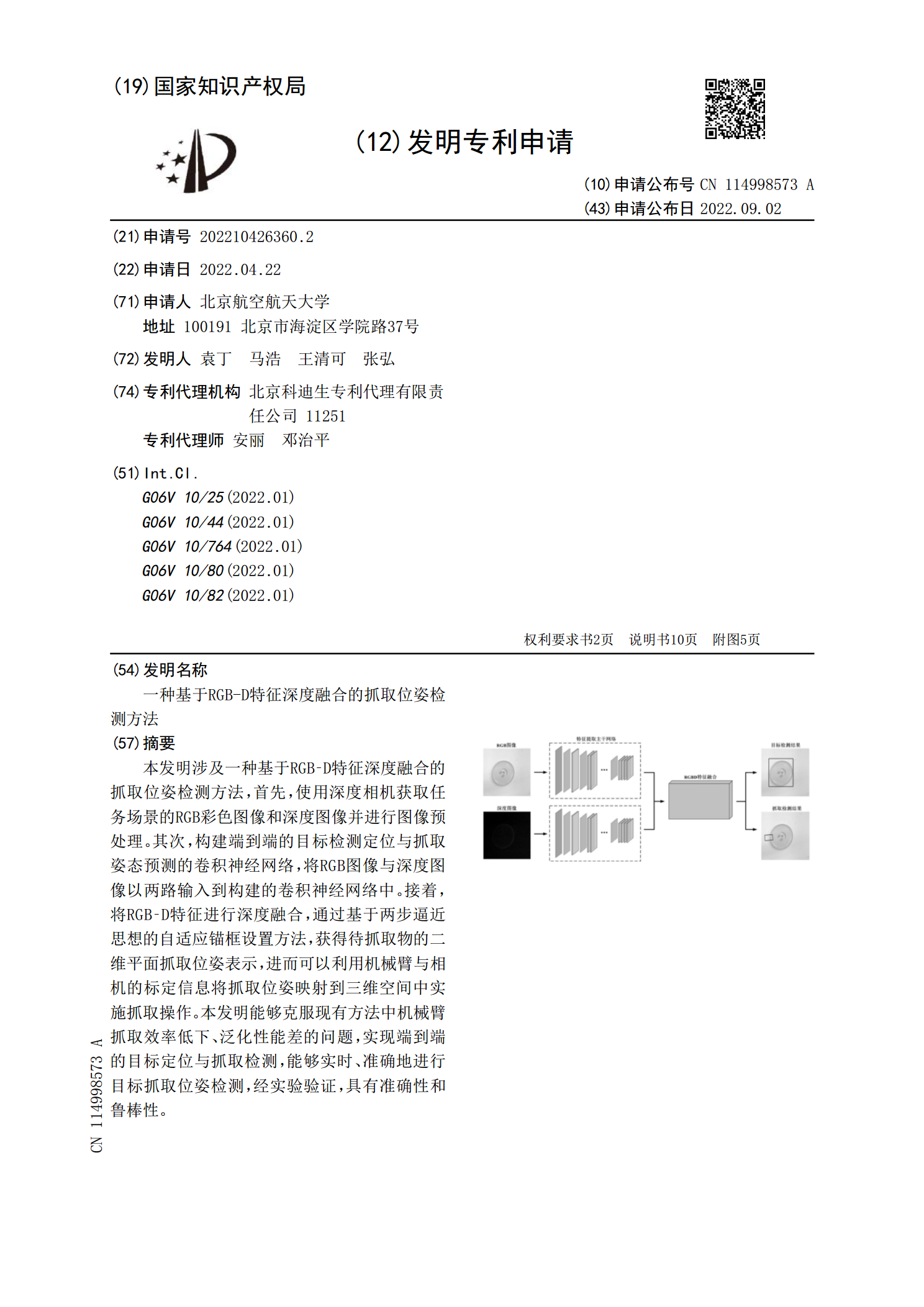
本发明涉及一种基于RGB‑D特征深度融合的抓取位姿检测方法,首先,使用深度相机获取任务场景的RGB彩色图像和深度图像并进行图像预处理。其次,构建端到端的目标检测定位与抓取姿态预测的卷积神经网络,将RGB图像与深度图像以两路输入到构建的卷积神经网络中。接着,将RGB‑D特征进行深度融合,通过基于两步逼近思想的自适应锚框设置方法,获得待抓取物的二维平面抓取位姿表示,进而可以利用机械臂与相机的标定信息将抓取位姿映射到三维空间中实施抓取操作。本发明能够克服现有方法中机械臂抓取效率低下、泛化性能差的问题,实现端到端
一种基于交互式特征融合的RGBD图像显著性检测方法.pdf
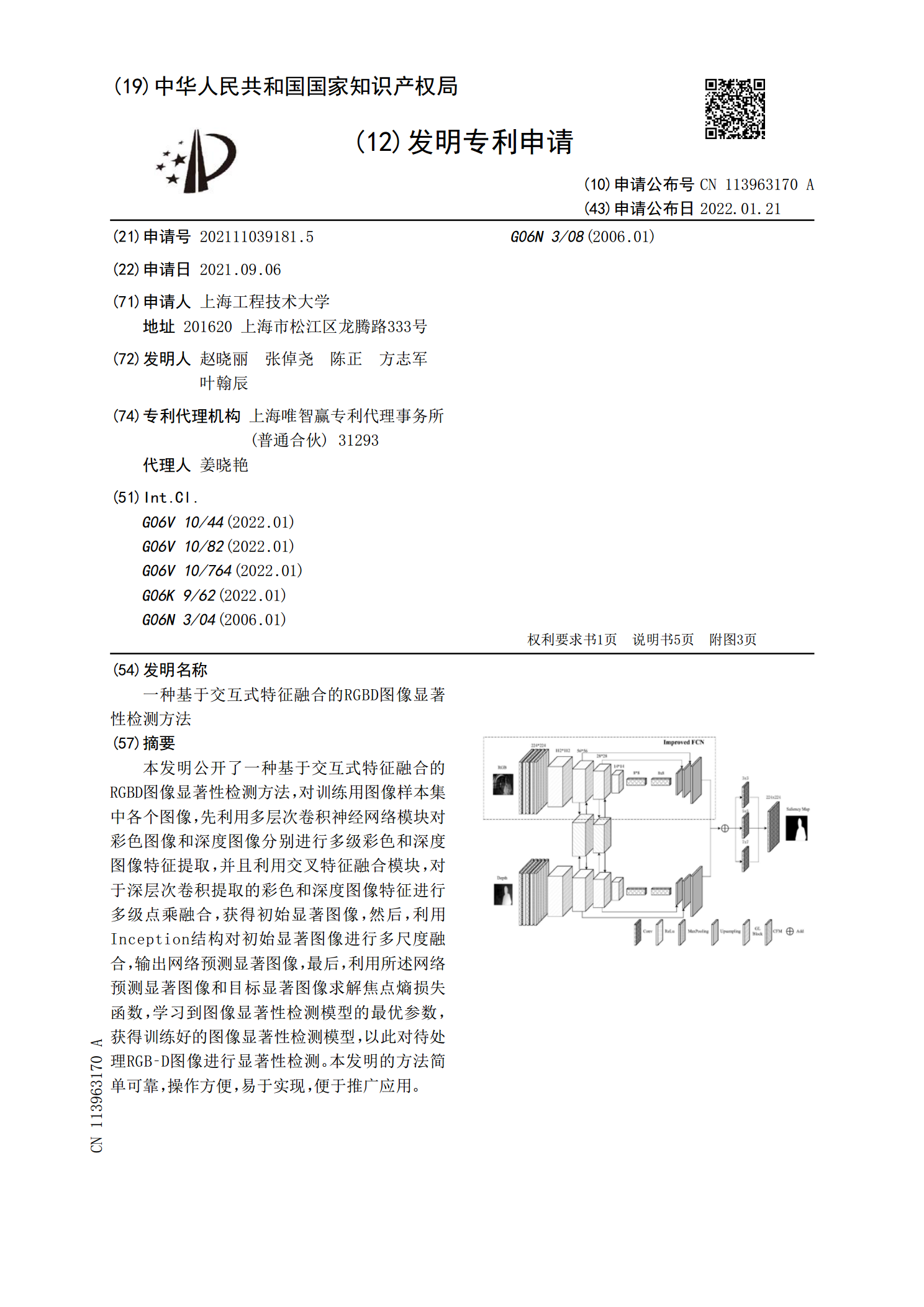
本发明公开了一种基于交互式特征融合的RGBD图像显著性检测方法,对训练用图像样本集中各个图像,先利用多层次卷积神经网络模块对彩色图像和深度图像分别进行多级彩色和深度图像特征提取,并且利用交叉特征融合模块,对于深层次卷积提取的彩色和深度图像特征进行多级点乘融合,获得初始显著图像,然后,利用Inception结构对初始显著图像进行多尺度融合,输出网络预测显著图像,最后,利用所述网络预测显著图像和目标显著图像求解焦点熵损失函数,学习到图像显著性检测模型的最优参数,获得训练好的图像显著性检测模型,以此对待处理RG
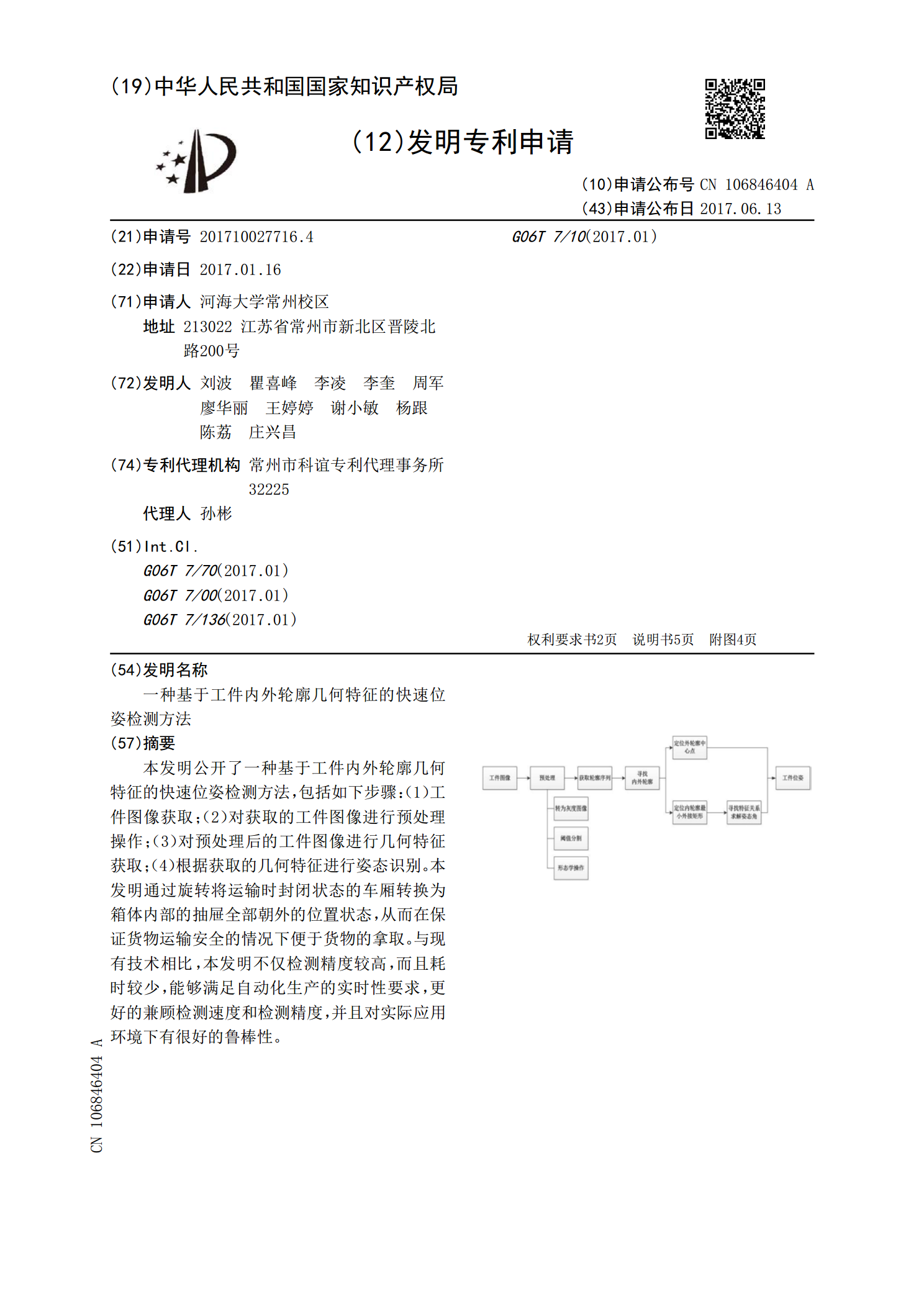
一种基于工件内外轮廓几何特征的快速位姿检测方法.pdf
本发明公开了一种基于工件内外轮廓几何特征的快速位姿检测方法,包括如下步骤:(1)工件图像获取;(2)对获取的工件图像进行预处理操作;(3)对预处理后的工件图像进行几何特征获取;(4)根据获取的几何特征进行姿态识别。本发明通过旋转将运输时封闭状态的车厢转换为箱体内部的抽屉全部朝外的位置状态,从而在保证货物运输安全的情况下便于货物的拿取。与现有技术相比,本发明不仅检测精度较高,而且耗时较少,能够满足自动化生产的实时性要求,更好的兼顾检测速度和检测精度,并且对实际应用环境下有很好的鲁棒性。
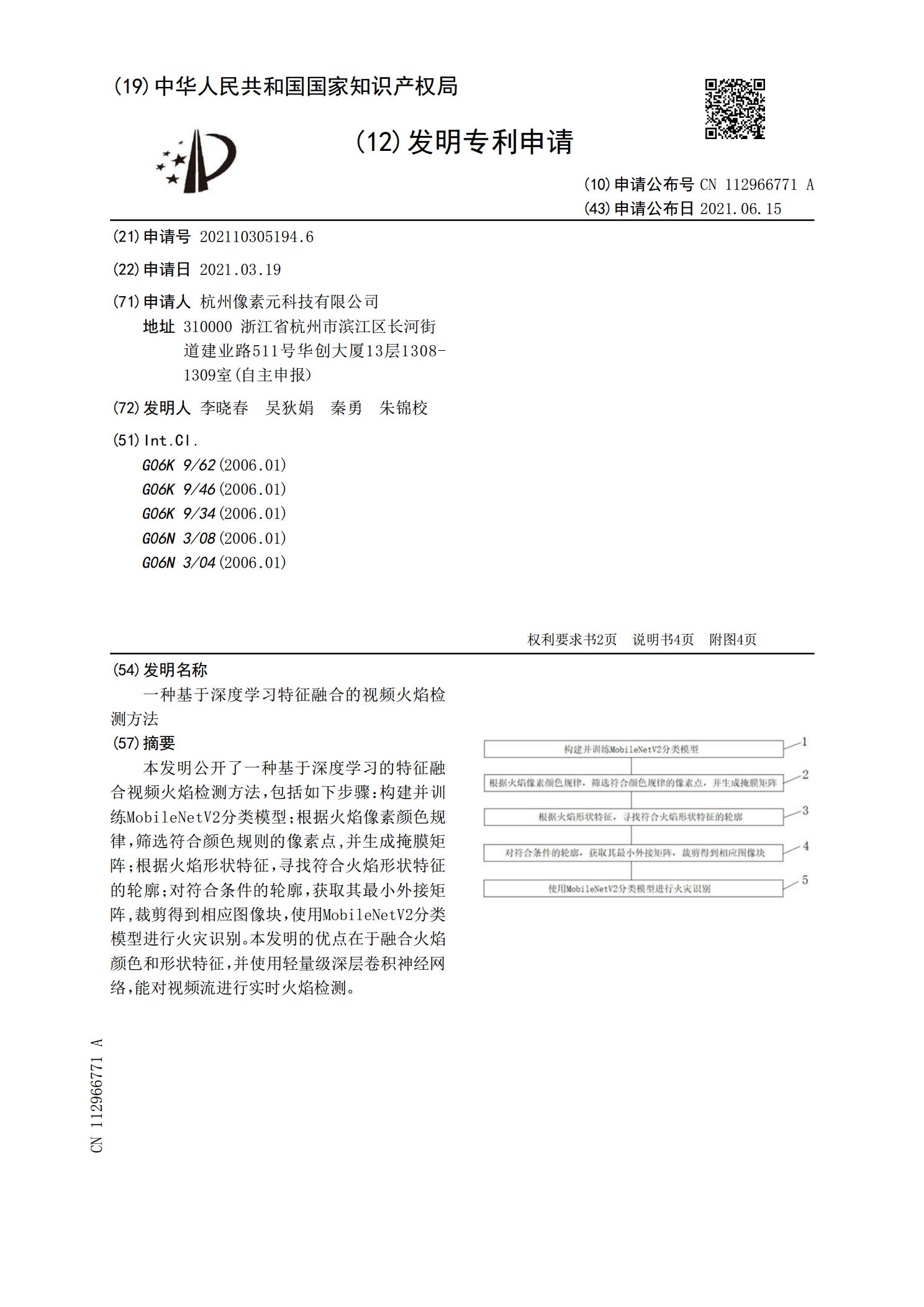
一种基于深度学习特征融合的视频火焰检测方法.pdf
本发明公开了一种基于深度学习的特征融合视频火焰检测方法,包括如下步骤:构建并训练MobileNetV2分类模型;根据火焰像素颜色规律,筛选符合颜色规则的像素点,并生成掩膜矩阵;根据火焰形状特征,寻找符合火焰形状特征的轮廓;对符合条件的轮廓,获取其最小外接矩阵,裁剪得到相应图像块,使用MobileNetV2分类模型进行火灾识别。本发明的优点在于融合火焰颜色和形状特征,并使用轻量级深层卷积神经网络,能对视频流进行实时火焰检测。
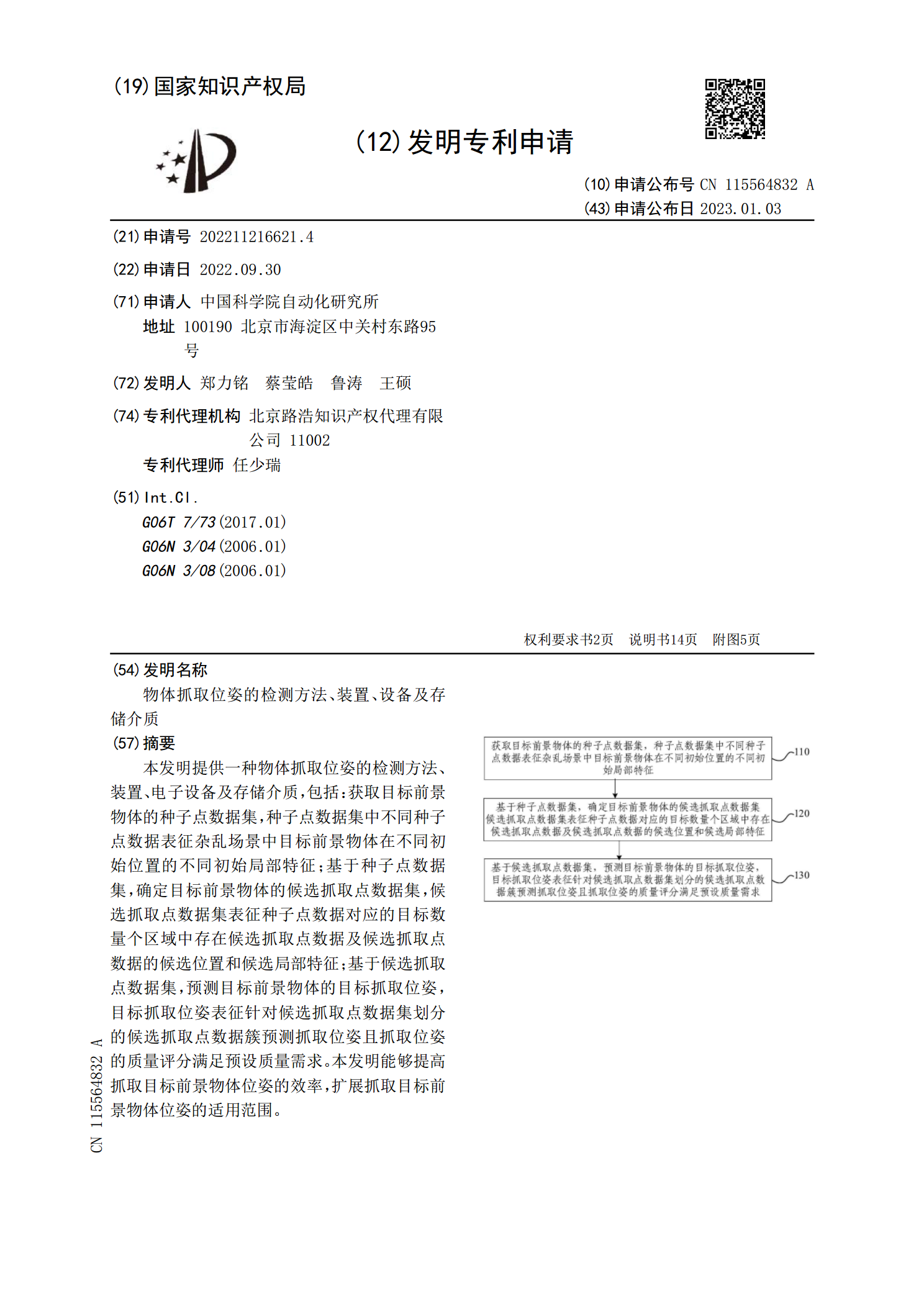
物体抓取位姿的检测方法、装置、设备及存储介质.pdf
本发明提供一种物体抓取位姿的检测方法、装置、电子设备及存储介质,包括:获取目标前景物体的种子点数据集,种子点数据集中不同种子点数据表征杂乱场景中目标前景物体在不同初始位置的不同初始局部特征;基于种子点数据集,确定目标前景物体的候选抓取点数据集,候选抓取点数据集表征种子点数据对应的目标数量个区域中存在候选抓取点数据及候选抓取点数据的候选位置和候选局部特征;基于候选抓取点数据集,预测目标前景物体的目标抓取位姿,目标抓取位姿表征针对候选抓取点数据集划分的候选抓取点数据簇预测抓取位姿且抓取位姿的质量评分满足预设质