
一种基于物联网的用于老人乘坐的智能扶梯机械手.pdf

猫巷****雪凝


1/10

2/10

3/10
4/10
5/10

6/10
7/10
8/10

9/10

10/10
亲,该文档总共11页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种基于物联网的用于老人乘坐的智能扶梯机械手.pdf
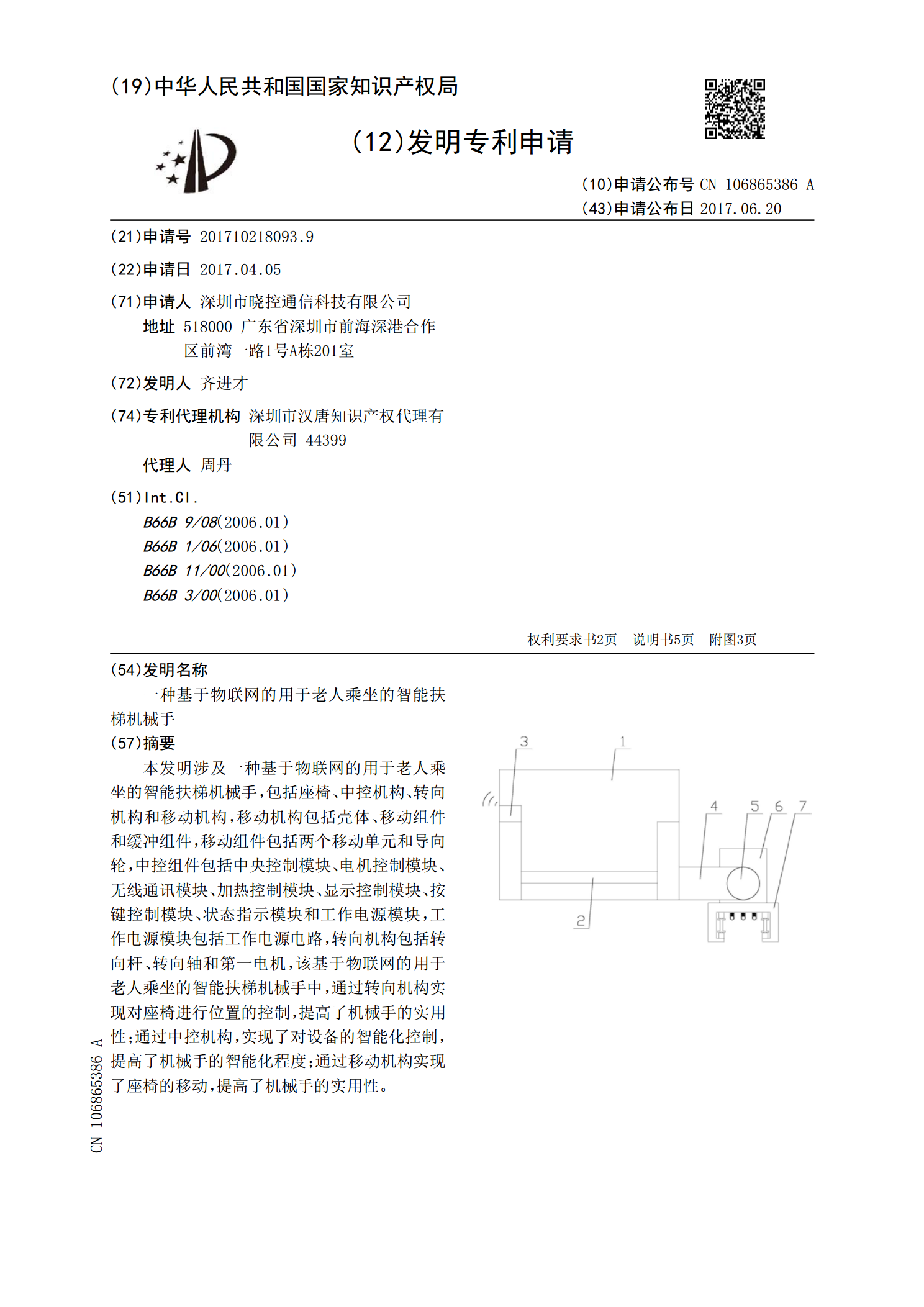
本发明涉及一种基于物联网的用于老人乘坐的智能扶梯机械手,包括座椅、中控机构、转向机构和移动机构,移动机构包括壳体、移动组件和缓冲组件,移动组件包括两个移动单元和导向轮,中控组件包括中央控制模块、电机控制模块、无线通讯模块、加热控制模块、显示控制模块、按键控制模块、状态指示模块和工作电源模块,工作电源模块包括工作电源电路,转向机构包括转向杆、转向轴和第一电机,该基于物联网的用于老人乘坐的智能扶梯机械手中,通过转向机构实现对座椅进行位置的控制,提高了机械手的实用性;通过中控机构,实现了对设备的智能化控制,提高
一种基于物联网的用于玻璃清洗的智能机械手.pdf
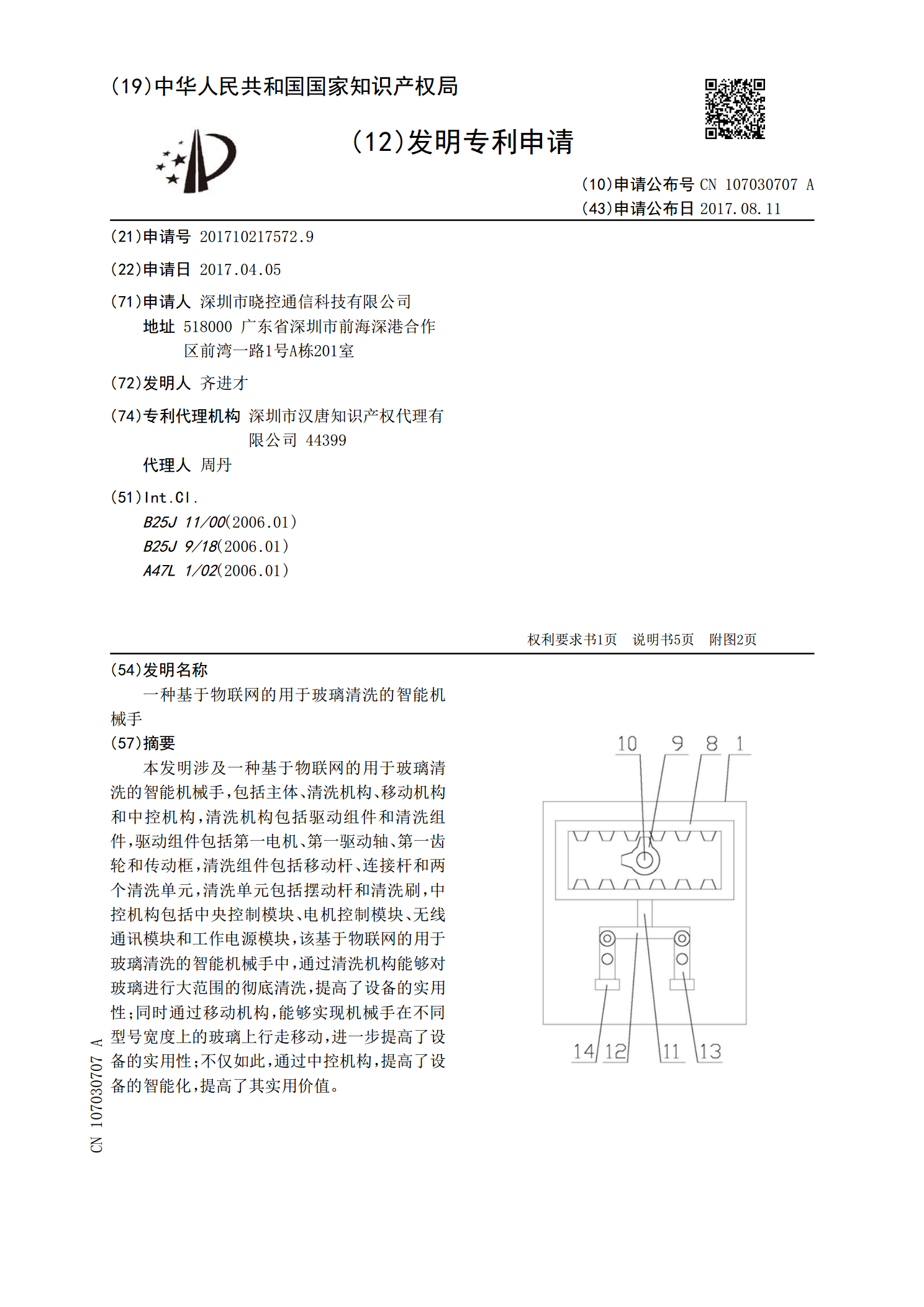
本发明涉及一种基于物联网的用于玻璃清洗的智能机械手,包括主体、清洗机构、移动机构和中控机构,清洗机构包括驱动组件和清洗组件,驱动组件包括第一电机、第一驱动轴、第一齿轮和传动框,清洗组件包括移动杆、连接杆和两个清洗单元,清洗单元包括摆动杆和清洗刷,中控机构包括中央控制模块、电机控制模块、无线通讯模块和工作电源模块,该基于物联网的用于玻璃清洗的智能机械手中,通过清洗机构能够对玻璃进行大范围的彻底清洗,提高了设备的实用性;同时通过移动机构,能够实现机械手在不同型号宽度上的玻璃上行走移动,进一步提高了设备的实用性

一种基于物联网的用于智能家电的智能洗衣机.pdf
本发明涉及智能家电领域,具体涉及一种基于物联网的用于智能家电的智能洗衣机,包括洗衣机本体,洗衣机本体的前侧壁中心开有智能滚筒,洗衣机本体的前侧壁的上端设有显示屏和智能按键,洗衣机本体的左侧壁设有过载保护器和继电器,洗衣机本体的右侧壁设有扬声器和数字信号处理器,洗衣机本体的左右两侧壁下端对称设有保护板,洗衣机本体的底部设有底板,底板的底部设有万向轮,保护板的底部转动连接支撑,洗衣机本体的内腔设有无线接收模块、存储器、处理器和电流传感器,过载保护器、继电器、无线接收模块、存储器、电流传感器、扬声器和数字信号处
一种基于物联网的用于智能车间的监控设备.pdf
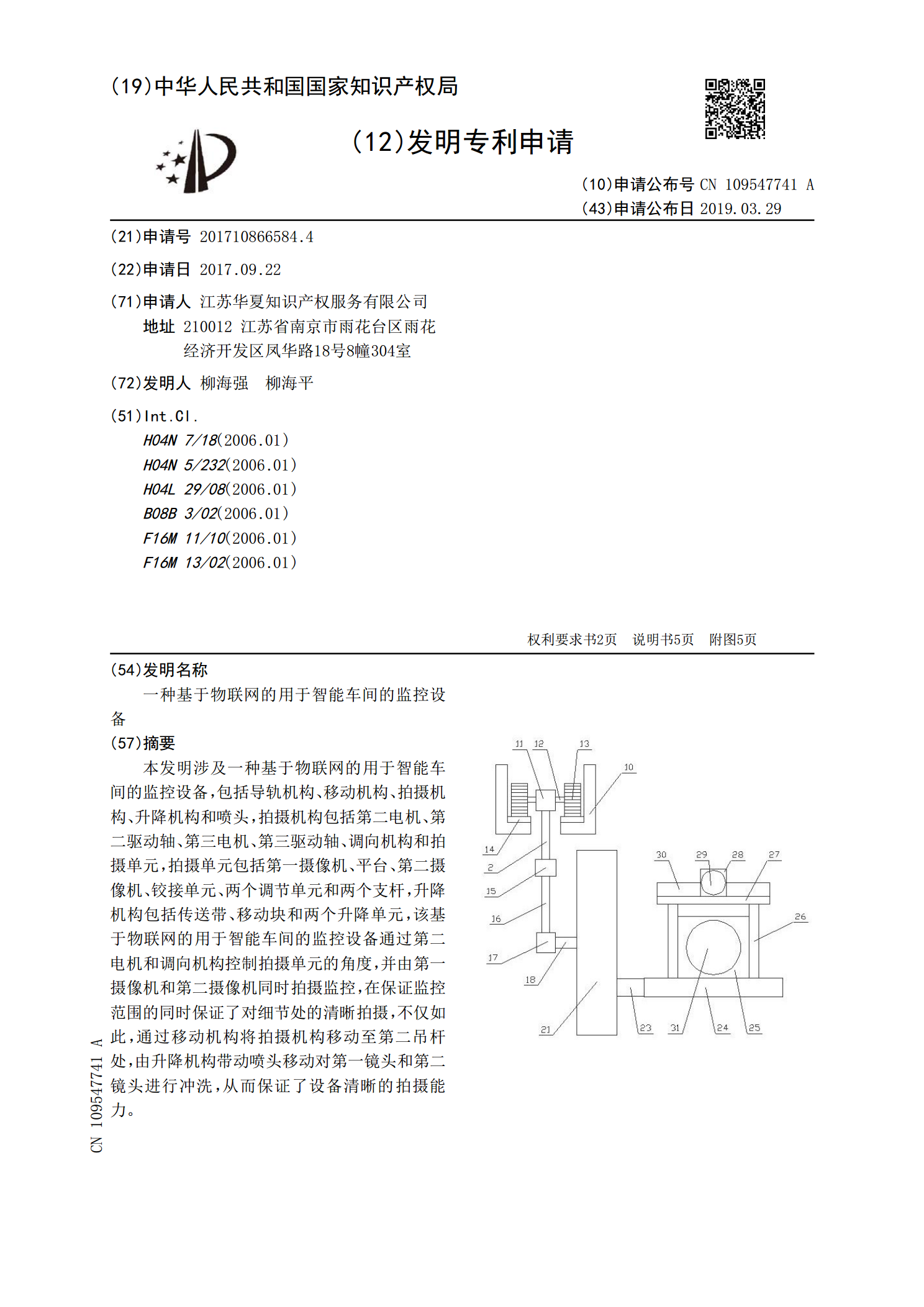
本发明涉及一种基于物联网的用于智能车间的监控设备,包括导轨机构、移动机构、拍摄机构、升降机构和喷头,拍摄机构包括第二电机、第二驱动轴、第三电机、第三驱动轴、调向机构和拍摄单元,拍摄单元包括第一摄像机、平台、第二摄像机、铰接单元、两个调节单元和两个支杆,升降机构包括传送带、移动块和两个升降单元,该基于物联网的用于智能车间的监控设备通过第二电机和调向机构控制拍摄单元的角度,并由第一摄像机和第二摄像机同时拍摄监控,在保证监控范围的同时保证了对细节处的清晰拍摄,不仅如此,通过移动机构将拍摄机构移动至第二吊杆处,由
一种基于物联网的智能搬运机械手机器人.pdf
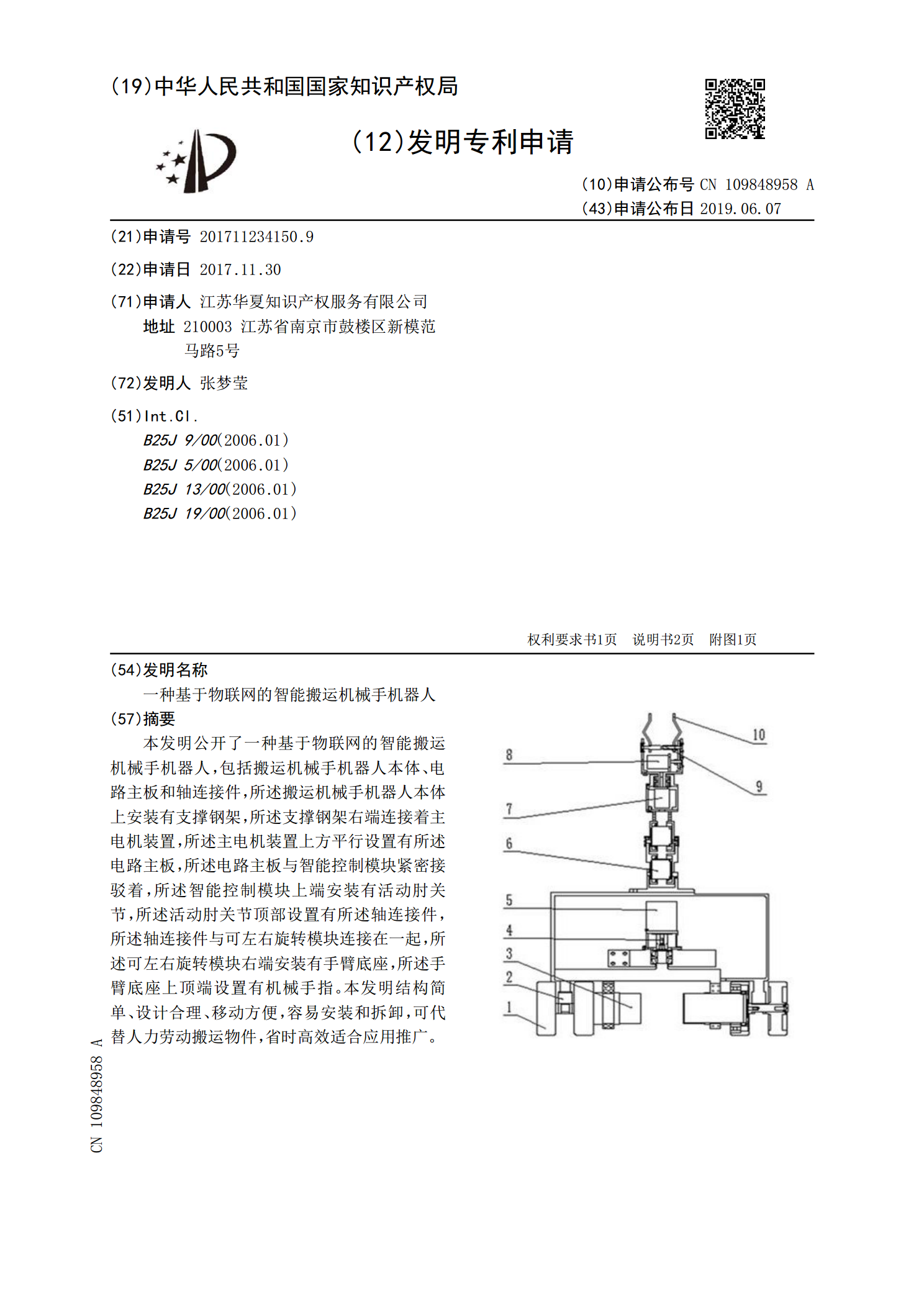
本发明公开了一种基于物联网的智能搬运机械手机器人,包括搬运机械手机器人本体、电路主板和轴连接件,所述搬运机械手机器人本体上安装有支撑钢架,所述支撑钢架右端连接着主电机装置,所述主电机装置上方平行设置有所述电路主板,所述电路主板与智能控制模块紧密接驳着,所述智能控制模块上端安装有活动肘关节,所述活动肘关节顶部设置有所述轴连接件,所述轴连接件与可左右旋转模块连接在一起,所述可左右旋转模块右端安装有手臂底座,所述手臂底座上顶端设置有机械手指。本发明结构简单、设计合理、移动方便,容易安装和拆卸,可代替人力劳动搬运