
一种驱动制动优化切换的电动汽车自适应巡航控制方法.pdf

婀娜****aj

1/10
2/10

3/10
4/10
5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共16页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种驱动制动优化切换的电动汽车自适应巡航控制方法.pdf
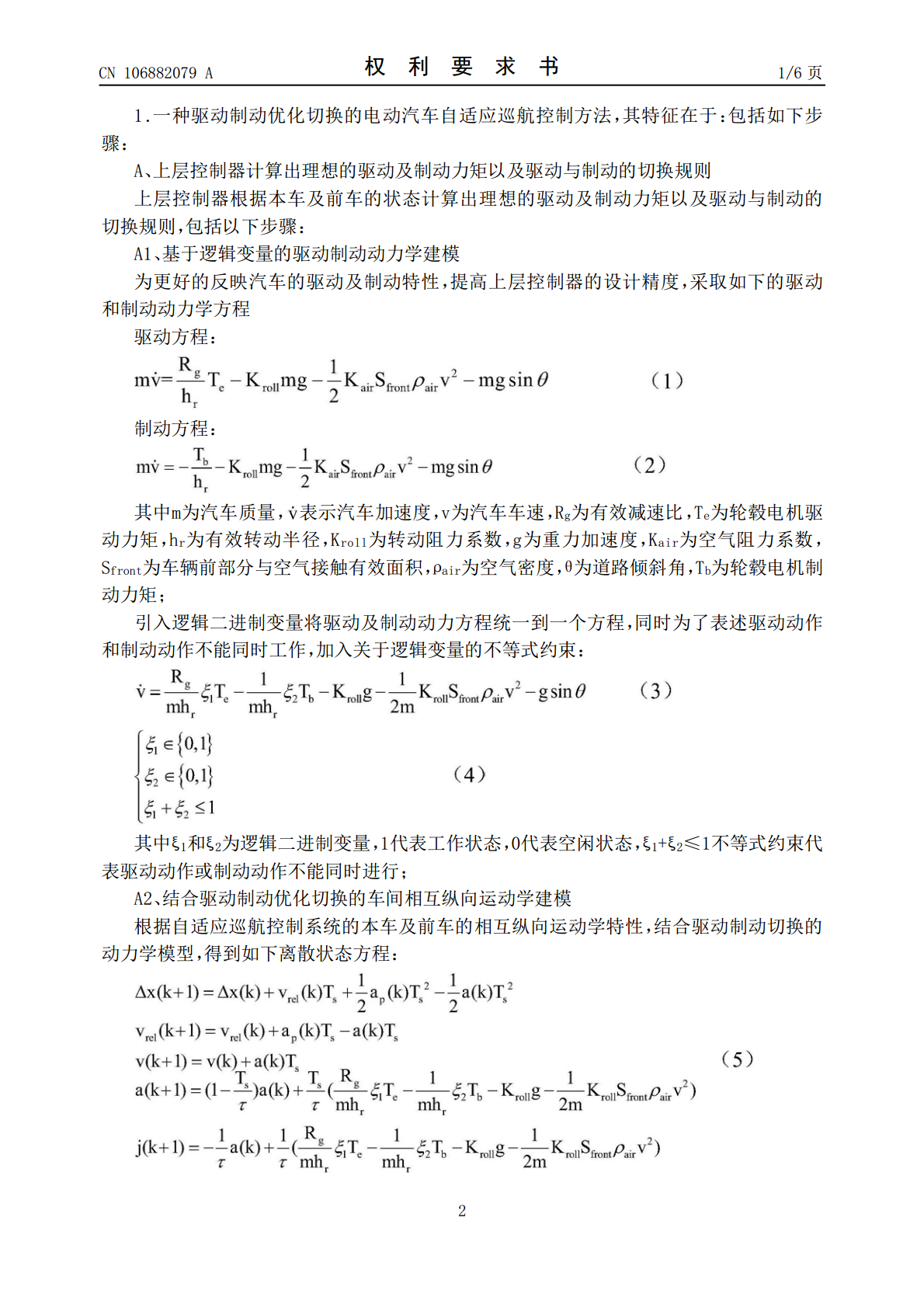
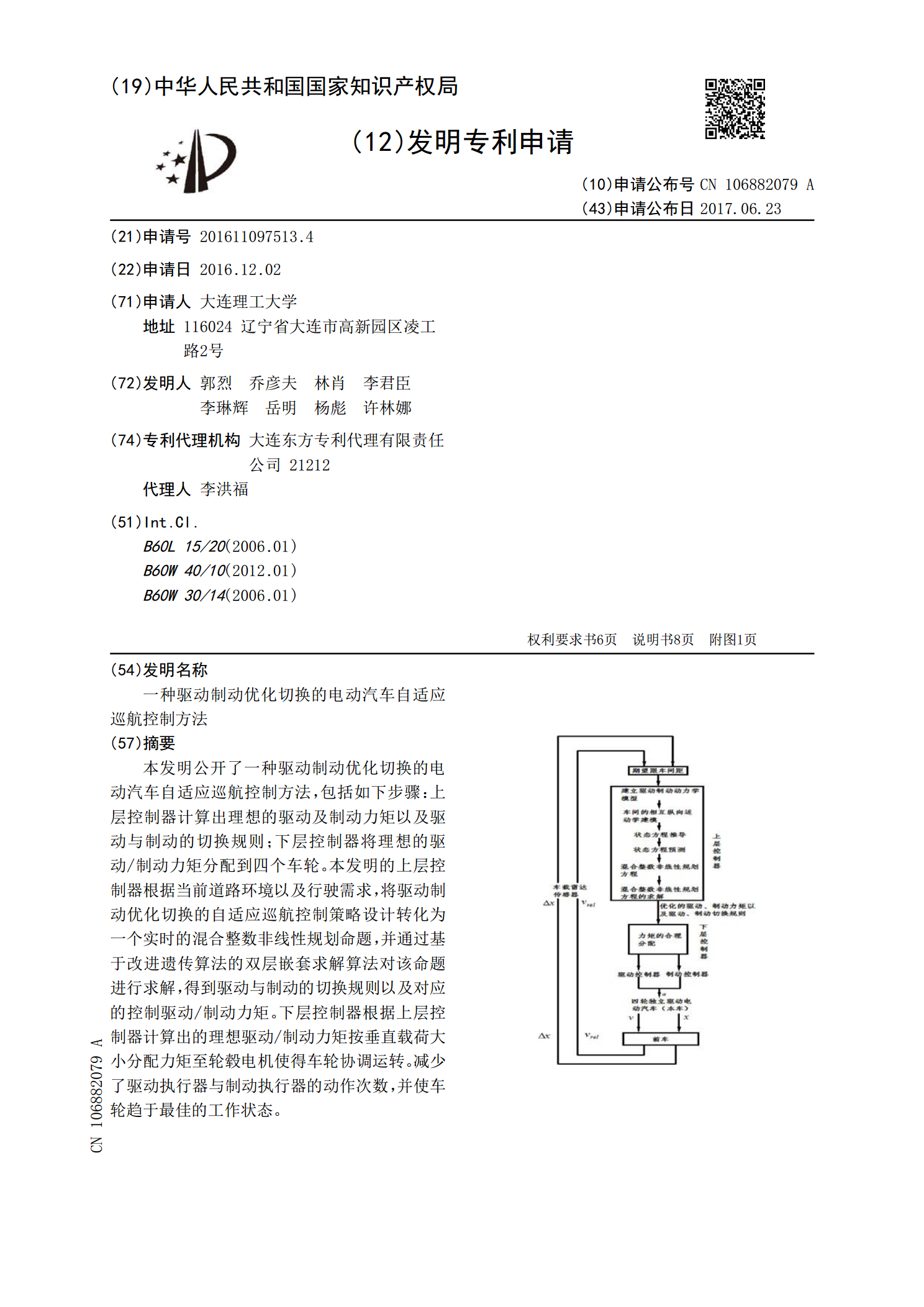
本发明公开了一种驱动制动优化切换的电动汽车自适应巡航控制方法,包括如下步骤:上层控制器计算出理想的驱动及制动力矩以及驱动与制动的切换规则;下层控制器将理想的驱动/制动力矩分配到四个车轮。本发明的上层控制器根据当前道路环境以及行驶需求,将驱动制动优化切换的自适应巡航控制策略设计转化为一个实时的混合整数非线性规划命题,并通过基于改进遗传算法的双层嵌套求解算法对该命题进行求解,得到驱动与制动的切换规则以及对应的控制驱动/制动力矩。下层控制器根据上层控制器计算出的理想驱动/制动力矩按垂直载荷大小分配力矩至轮毂电机

用于电动汽车的自适应巡航控制回馈制动扭矩监控方法.pdf
本发明提供了一种用于电动汽车的自适应巡航控制回馈制动扭矩监控方法,所述方法包括:当整车进入自适应巡航控制状态后,实时监控实际电机回馈制动扭矩和车辆当前车速;当目标电机回馈制动扭矩和所述实际电机回馈制动扭矩差值大于第一阀值,且在第一预设时间段内的积分值超过第二阀值,认为电机回馈制动不足以让整车达到合理的减速度,车辆稳定控制系统进入预填充阶段;当目标电机回馈制动扭矩和实际电机回馈制动扭矩差值大于第三阀值,且在第二预设时间段内的积分值超过第四阀值,则判断为需要车辆稳定控制系统提供液压制动。

用于优化自适应巡航控制中再生制动的系统和方法.pdf
公开了一种用于优化自适应巡航控制中再生制动的系统和方法。一种车辆包括:牵引车轮;电机,被构造为向牵引车轮提供再生制动扭矩;车轮制动器,被构造为向牵引车轮提供摩擦制动扭矩;以及至少一个动力源,被构造为向牵引车轮提供驱动扭矩。所述车辆还包括:传感器,被配置为检测前方对象;以及至少一个控制器。控制器被配置为根据自适应巡航控制(ACC)算法来控制动力源、车轮制动器和电机。所述ACC算法被配置为响应于检测到的前方对象和最大的再生制动距离,命令电机提供再生制动扭矩而不应用车轮制动器。所述最大的再生制动距离是基于动力传

四轮独立驱动电动汽车自适应巡航控制系统力矩分配方法.pdf
本发明公开了一种四轮独立驱动电动汽车自适应巡航控制系统力矩分配方法,由上层控制方法计算出理想加速度指令并输入到下层控制方法中,下层控制方法根据上层控制方法计算的理想加速度指令计算理想驱动力矩并分配力矩到四个车轮,解决了传统的自适应巡航控制系统无法直接应用于四轮独立驱动电动汽车的问题。上层控制方法采用柔滑约束的模型预测控制,提高了自适应巡航控制系统的实用性,满足了驾驶员所需的安全性、舒适性和经济性的要求。下层控制方法采用模糊控制得到理想纵向力矩并按照垂直载荷大小比例分配力矩到四个车轮,在保证四轮独立驱动电动

一种新的数据驱动的非线性自适应切换控制方法.docx
一种新的数据驱动的非线性自适应切换控制方法标题:一种新的数据驱动的非线性自适应切换控制方法摘要:在现代工程控制系统中,非线性自适应控制已经被广泛应用于解决复杂的控制问题。然而,由于系统的工作环境的动态性和不确定性,单一的控制策略常常无法满足实际需求。为了解决这一问题,本文提出了一种新的数据驱动的非线性自适应切换控制方法,该方法能够根据系统当前状态和外部输入数据动态地选择最优的控制策略,从而提高系统的性能和鲁棒性。本文首先介绍了非线性自适应控制的基本原理和目前存在的问题,然后详细阐述了数据驱动的切换控制方法