
一种新的数据驱动的非线性自适应切换控制方法.docx

快乐****蜜蜂


1/2

2/2
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种新的数据驱动的非线性自适应切换控制方法.docx
一种新的数据驱动的非线性自适应切换控制方法标题:一种新的数据驱动的非线性自适应切换控制方法摘要:在现代工程控制系统中,非线性自适应控制已经被广泛应用于解决复杂的控制问题。然而,由于系统的工作环境的动态性和不确定性,单一的控制策略常常无法满足实际需求。为了解决这一问题,本文提出了一种新的数据驱动的非线性自适应切换控制方法,该方法能够根据系统当前状态和外部输入数据动态地选择最优的控制策略,从而提高系统的性能和鲁棒性。本文首先介绍了非线性自适应控制的基本原理和目前存在的问题,然后详细阐述了数据驱动的切换控制方法
一种驱动制动优化切换的电动汽车自适应巡航控制方法.pdf
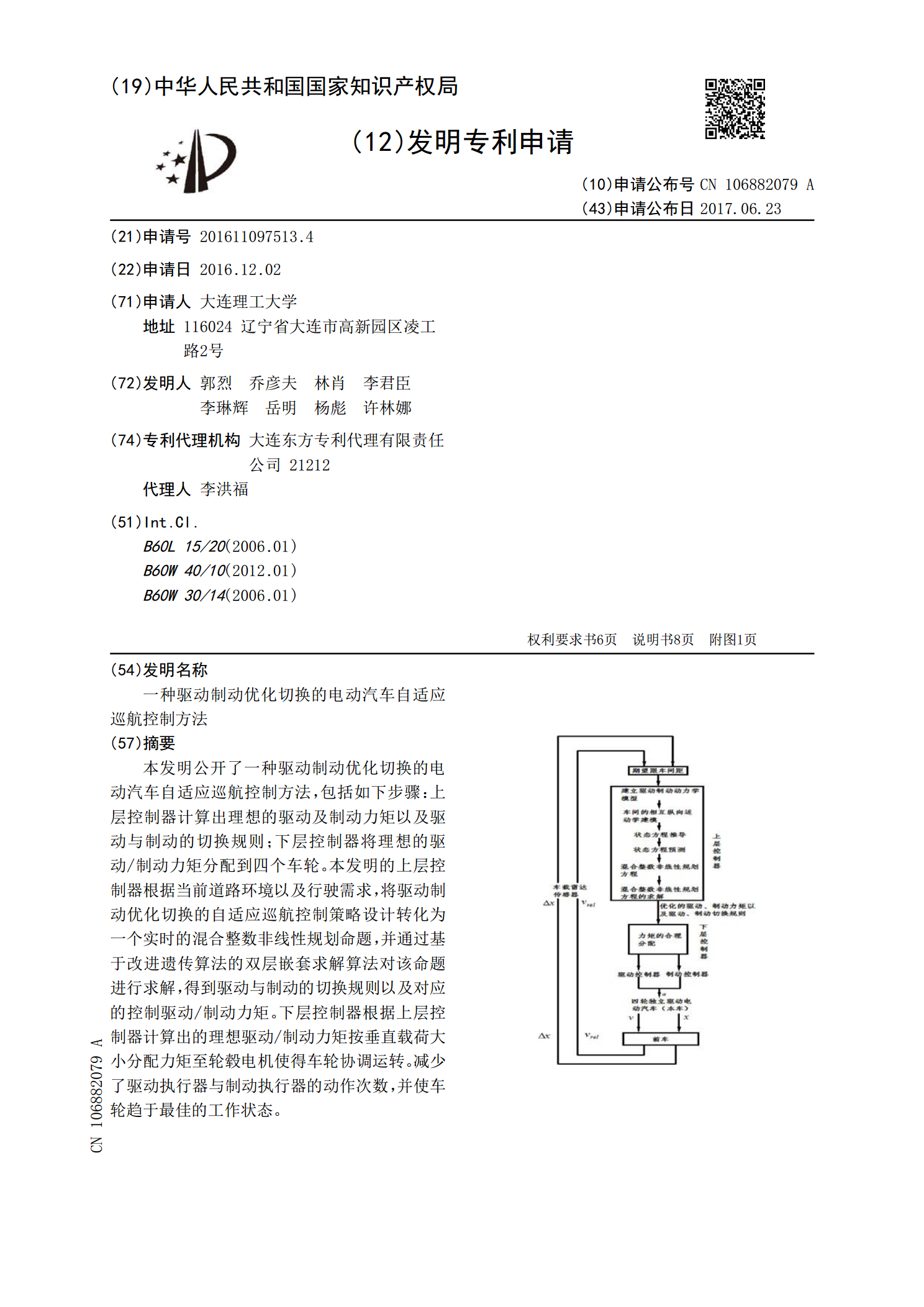
本发明公开了一种驱动制动优化切换的电动汽车自适应巡航控制方法,包括如下步骤:上层控制器计算出理想的驱动及制动力矩以及驱动与制动的切换规则;下层控制器将理想的驱动/制动力矩分配到四个车轮。本发明的上层控制器根据当前道路环境以及行驶需求,将驱动制动优化切换的自适应巡航控制策略设计转化为一个实时的混合整数非线性规划命题,并通过基于改进遗传算法的双层嵌套求解算法对该命题进行求解,得到驱动与制动的切换规则以及对应的控制驱动/制动力矩。下层控制器根据上层控制器计算出的理想驱动/制动力矩按垂直载荷大小分配力矩至轮毂电机

一种非线性自适应切换控制混合方法及其在倾转旋翼机上的应用.docx
一种非线性自适应切换控制混合方法及其在倾转旋翼机上的应用一种非线性自适应切换控制混合方法及其在倾转旋翼机上的应用摘要本文提出了一种基于非线性自适应切换控制的混合方法,并将其应用到倾转旋翼机中。倾转旋翼机是一种具有垂直起降和水平飞行功能的新型飞行器,具有较好的机动性能。然而,由于其非线性和多运动模式的特点,控制难度较大。本文通过将自适应控制和切换控制相结合,提出了一种能够自适应调节控制器参数并能根据不同的飞行模式进行切换的控制方法,以提高倾转旋翼机的飞行性能和稳定性。首先,文章介绍了倾转旋翼机的结构和运动模

不确定非线性系统自适应切换控制.doc
不确定非线性系统自适应切换控制近四十年来,不确定非线性系统控制问题成为了非线性控制领域研究的热点课题,尤其是带有未知控制方向的自适应控制更是受到了越来越多学者们的关注,并取得了很多重要的结果但在实际应用中,仍然有许多有待于进一步研究和探讨的问题值得去研究。本论文主要研究不确定非线性系统的稳定性问题和事件驱动控制问题。针对几类不确定非线性系统,提出一种新的自适应切换控制方法。并且针对一类带粘性的Camassa-Holm方程提出一种事件驱动控制方法。本论文的主要成果概括如下:1.第3章针对一类带有多个未知控制

不确定非线性系统自适应切换控制.doc
不确定非线性系统自适应切换控制近四十年来,不确定非线性系统控制问题成为了非线性控制领域研究的热点课题,尤其是带有未知控制方向的自适应控制更是受到了越来越多学者们的关注,并取得了很多重要的结果但在实际应用中,仍然有许多有待于进一步研究和探讨的问题值得去研究。本论文主要研究不确定非线性系统的稳定性问题和事件驱动控制问题。针对几类不确定非线性系统,提出一种新的自适应切换控制方法。并且针对一类带粘性的Camassa-Holm方程提出一种事件驱动控制方法。本论文的主要成果概括如下:1.第3章针对一类带有多个未知控制