
四轮独立驱动电动汽车自适应巡航控制系统力矩分配方法.pdf

是你****枝呀

1/10

2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共22页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

四轮独立驱动电动汽车自适应巡航控制系统力矩分配方法.pdf
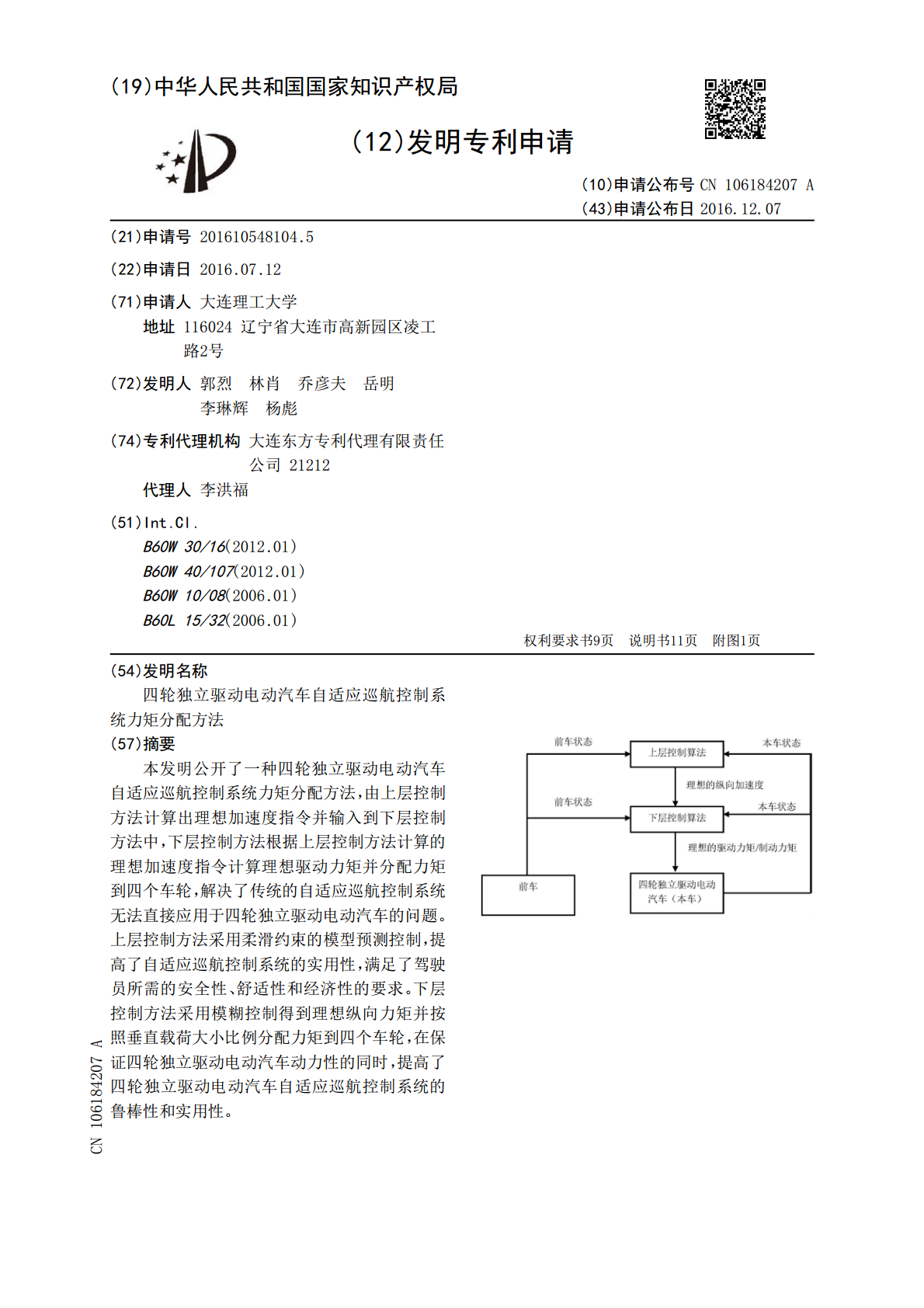
本发明公开了一种四轮独立驱动电动汽车自适应巡航控制系统力矩分配方法,由上层控制方法计算出理想加速度指令并输入到下层控制方法中,下层控制方法根据上层控制方法计算的理想加速度指令计算理想驱动力矩并分配力矩到四个车轮,解决了传统的自适应巡航控制系统无法直接应用于四轮独立驱动电动汽车的问题。上层控制方法采用柔滑约束的模型预测控制,提高了自适应巡航控制系统的实用性,满足了驾驶员所需的安全性、舒适性和经济性的要求。下层控制方法采用模糊控制得到理想纵向力矩并按照垂直载荷大小比例分配力矩到四个车轮,在保证四轮独立驱动电动
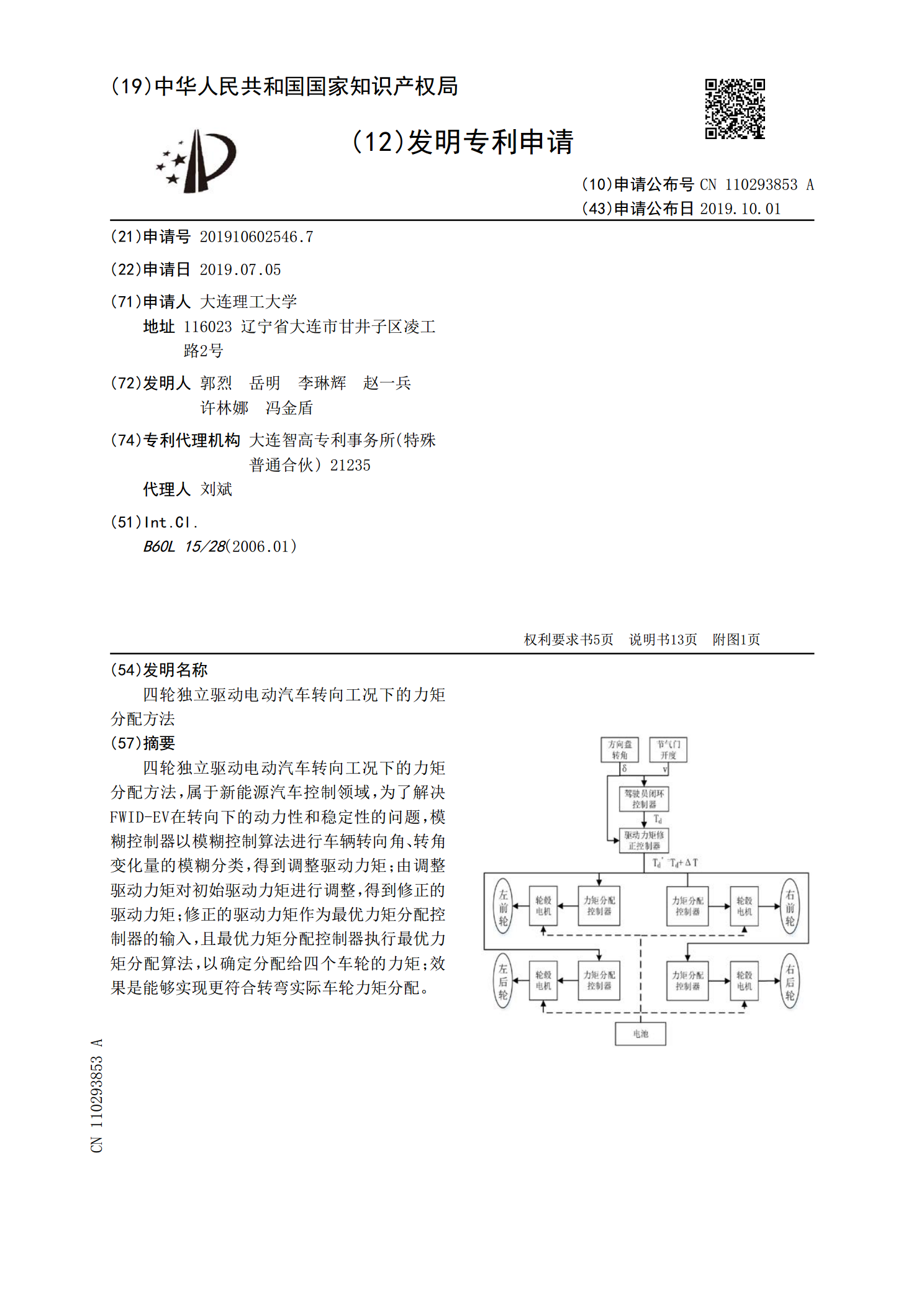
四轮独立驱动电动汽车转向工况下的力矩分配方法.pdf
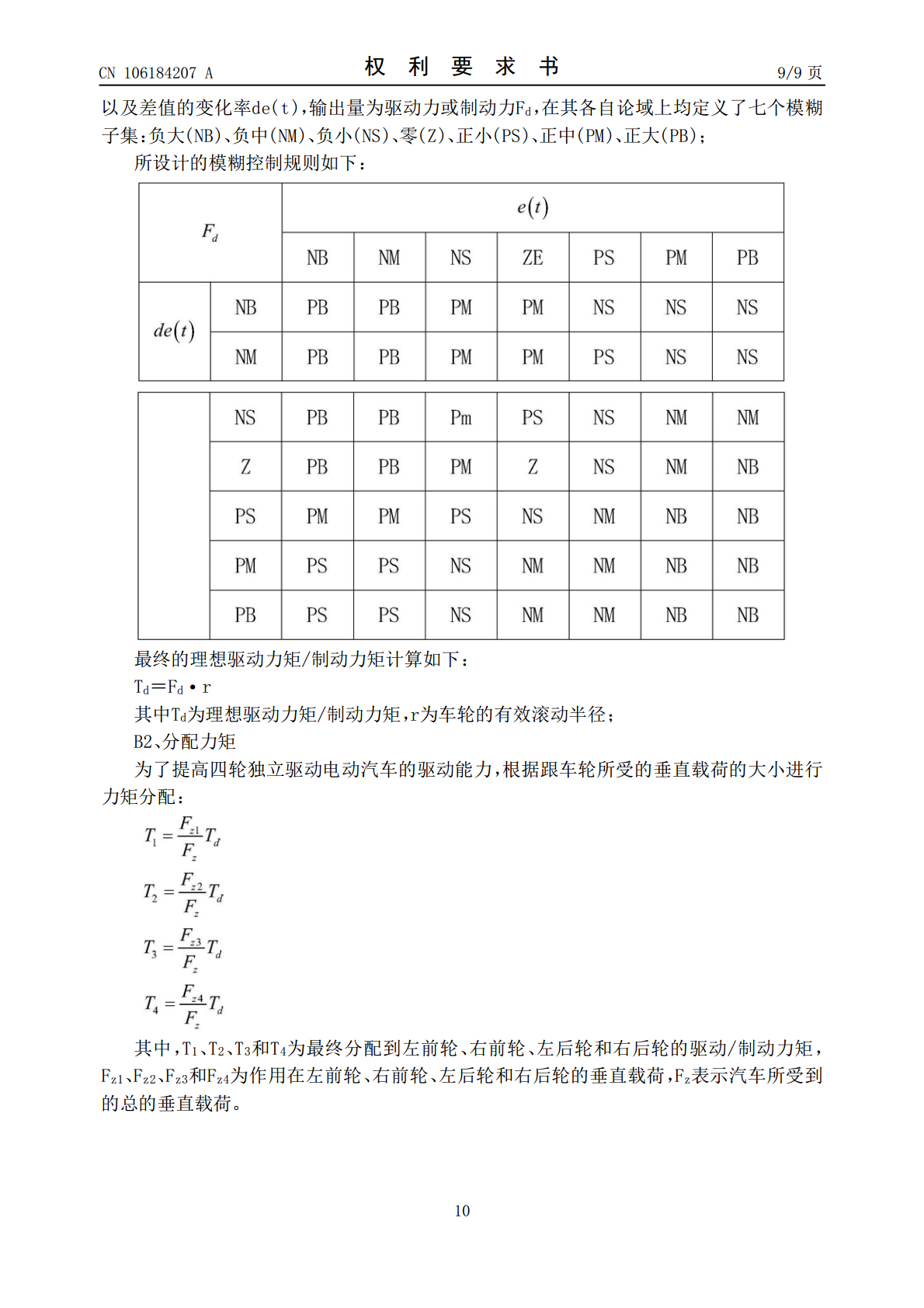
四轮独立驱动电动汽车转向工况下的力矩分配方法,属于新能源汽车控制领域,为了解决FWID‑EV在转向下的动力性和稳定性的问题,模糊控制器以模糊控制算法进行车辆转向角、转角变化量的模糊分类,得到调整驱动力矩;由调整驱动力矩对初始驱动力矩进行调整,得到修正的驱动力矩;修正的驱动力矩作为最优力矩分配控制器的输入,且最优力矩分配控制器执行最优力矩分配算法,以确定分配给四个车轮的力矩;效果是能够实现更符合转弯实际车轮力矩分配。

纯电动汽车全速自适应巡航控制系统的研究.doc
纯电动汽车全速自适应巡航控制系统的研究随着节能环保的提倡和智能化热潮的兴起,电动汽车先进驾驶员辅助系统的开发越来越被重视。目前,电动汽车自适应巡航工作车速受到限制,跟踪性和抗干扰能力差,不能完全适应复杂多变的行驶环境。因此研究自适应巡航控制系统在全速和外界干扰工况下的响应具有重要意义。本文研究了纯电动汽车自适应巡航控制系统不同工作模式的切换和执行策略,采用了基于二次型优化和模型预测控制理论的纵向控制方法,针对不同驾驶工况进行仿真分析,验证了自适应巡航控制策略和算法的有效性。本文选取车辆的纵向车速作为被控对

纯电动汽车全速自适应巡航控制系统的研究.doc
纯电动汽车全速自适应巡航控制系统的研究随着节能环保的提倡和智能化热潮的兴起,电动汽车先进驾驶员辅助系统的开发越来越被重视。目前,电动汽车自适应巡航工作车速受到限制,跟踪性和抗干扰能力差,不能完全适应复杂多变的行驶环境。因此研究自适应巡航控制系统在全速和外界干扰工况下的响应具有重要意义。本文研究了纯电动汽车自适应巡航控制系统不同工作模式的切换和执行策略,采用了基于二次型优化和模型预测控制理论的纵向控制方法,针对不同驾驶工况进行仿真分析,验证了自适应巡航控制策略和算法的有效性。本文选取车辆的纵向车速作为被控对
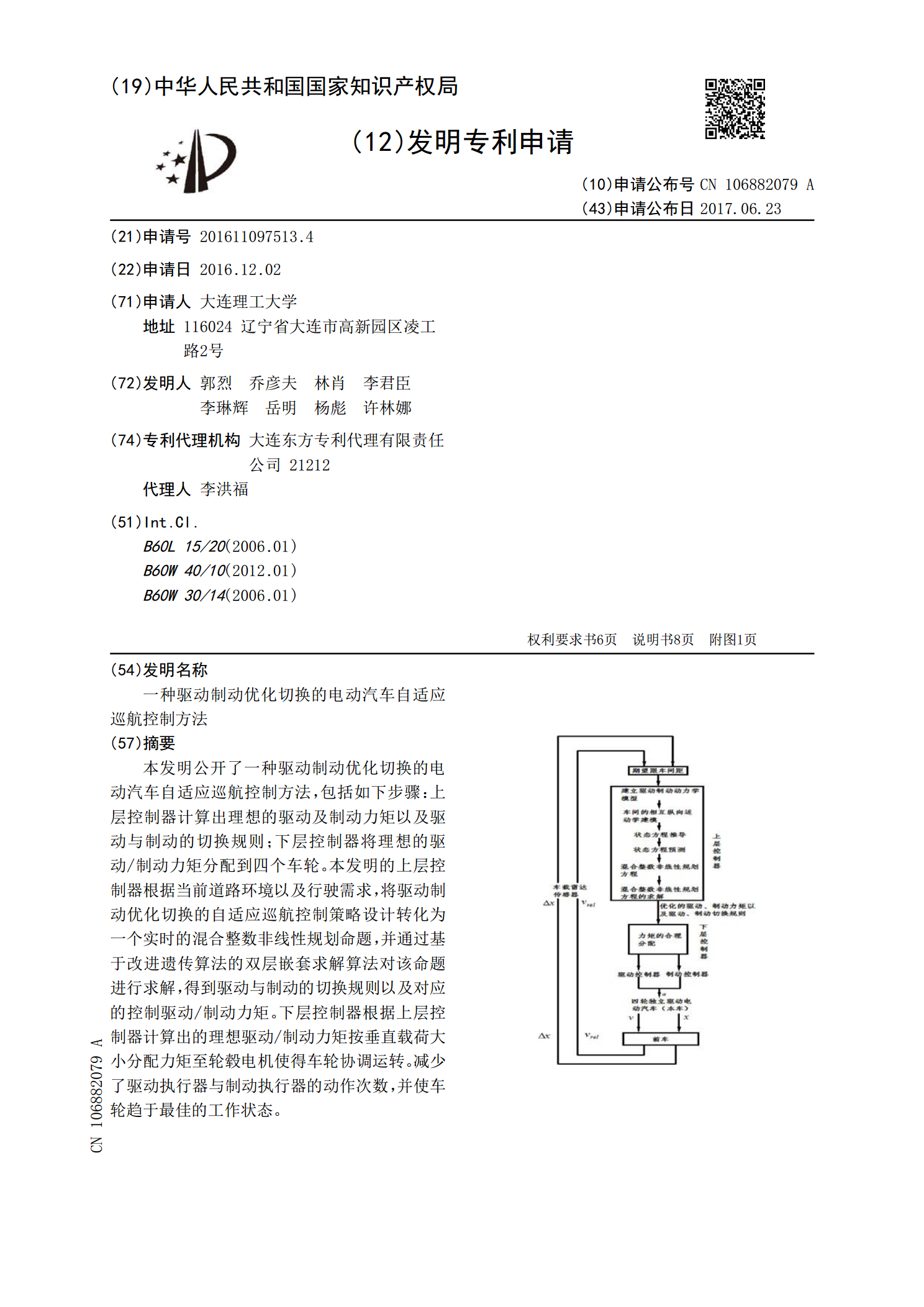
一种驱动制动优化切换的电动汽车自适应巡航控制方法.pdf
本发明公开了一种驱动制动优化切换的电动汽车自适应巡航控制方法,包括如下步骤:上层控制器计算出理想的驱动及制动力矩以及驱动与制动的切换规则;下层控制器将理想的驱动/制动力矩分配到四个车轮。本发明的上层控制器根据当前道路环境以及行驶需求,将驱动制动优化切换的自适应巡航控制策略设计转化为一个实时的混合整数非线性规划命题,并通过基于改进遗传算法的双层嵌套求解算法对该命题进行求解,得到驱动与制动的切换规则以及对应的控制驱动/制动力矩。下层控制器根据上层控制器计算出的理想驱动/制动力矩按垂直载荷大小分配力矩至轮毂电机