
用于优化自适应巡航控制中再生制动的系统和方法.pdf

小寄****淑k


1/10

2/10
3/10
4/10

5/10

6/10
7/10

8/10

9/10

10/10
亲,该文档总共14页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

用于优化自适应巡航控制中再生制动的系统和方法.pdf
公开了一种用于优化自适应巡航控制中再生制动的系统和方法。一种车辆包括:牵引车轮;电机,被构造为向牵引车轮提供再生制动扭矩;车轮制动器,被构造为向牵引车轮提供摩擦制动扭矩;以及至少一个动力源,被构造为向牵引车轮提供驱动扭矩。所述车辆还包括:传感器,被配置为检测前方对象;以及至少一个控制器。控制器被配置为根据自适应巡航控制(ACC)算法来控制动力源、车轮制动器和电机。所述ACC算法被配置为响应于检测到的前方对象和最大的再生制动距离,命令电机提供再生制动扭矩而不应用车轮制动器。所述最大的再生制动距离是基于动力传
自适应巡航控制方法和系统.pdf
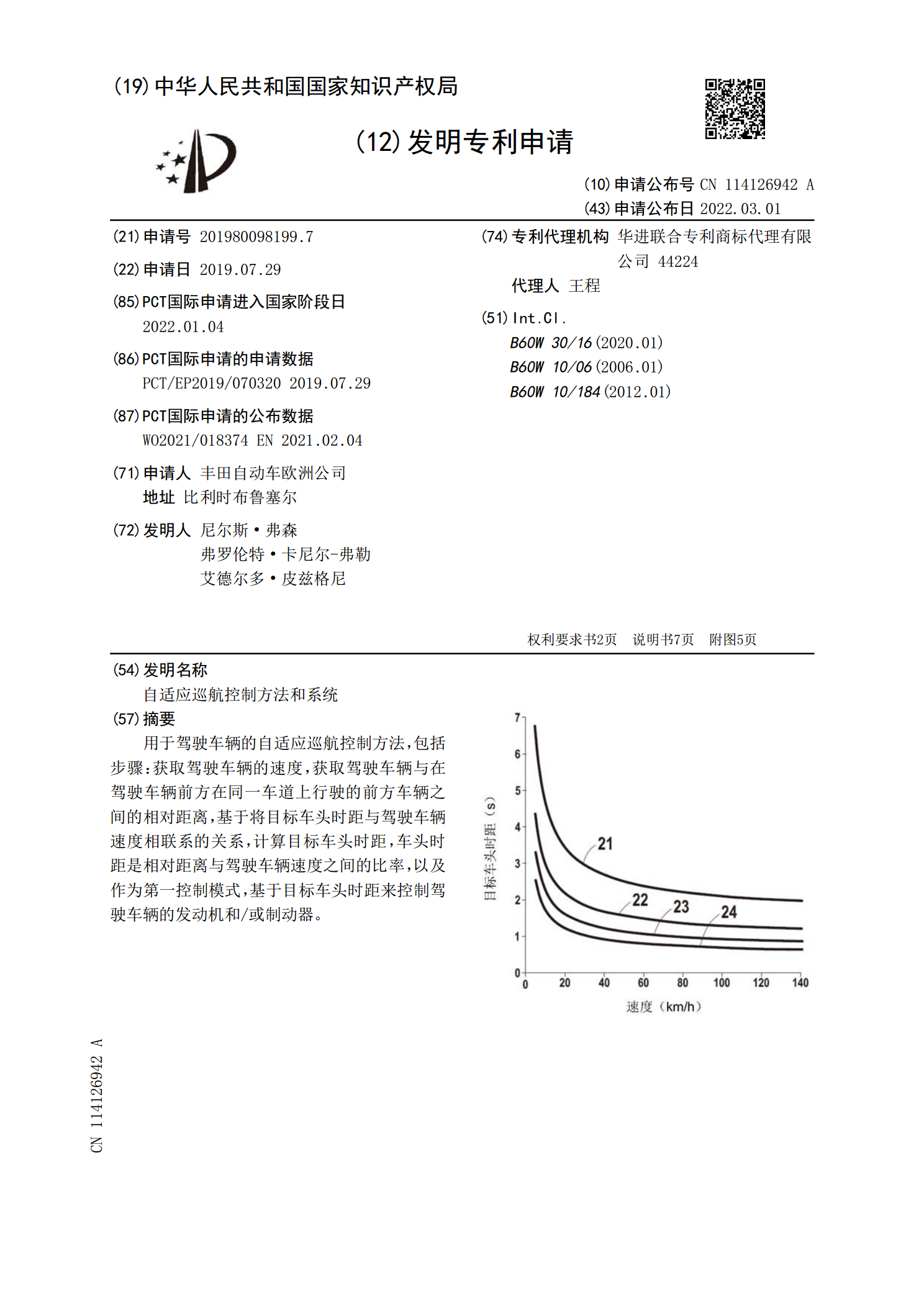
用于驾驶车辆的自适应巡航控制方法,包括步骤:获取驾驶车辆的速度,获取驾驶车辆与在驾驶车辆前方在同一车道上行驶的前方车辆之间的相对距离,基于将目标车头时距与驾驶车辆速度相联系的关系,计算目标车头时距,车头时距是相对距离与驾驶车辆速度之间的比率,以及作为第一控制模式,基于目标车头时距来控制驾驶车辆的发动机和/或制动器。
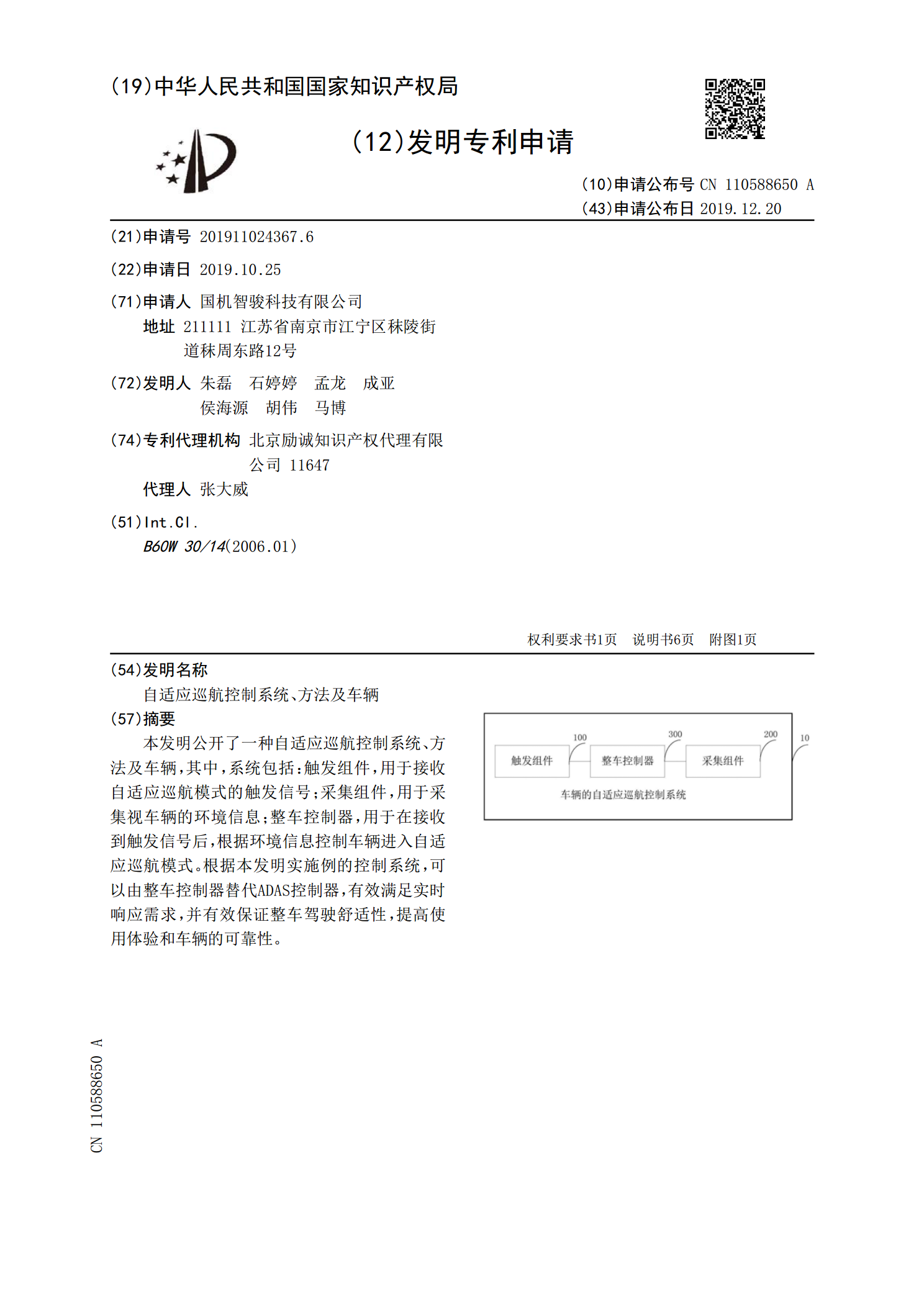
自适应巡航控制系统、方法及车辆.pdf
本发明公开了一种自适应巡航控制系统、方法及车辆,其中,系统包括:触发组件,用于接收自适应巡航模式的触发信号;采集组件,用于采集视车辆的环境信息;整车控制器,用于在接收到触发信号后,根据环境信息控制车辆进入自适应巡航模式。根据本发明实施例的控制系统,可以由整车控制器替代ADAS控制器,有效满足实时响应需求,并有效保证整车驾驶舒适性,提高使用体验和车辆的可靠性。

用于控制车辆的再生制动扭矩的方法和系统.pdf
一种用于控制车辆(100)的再生制动扭矩的方法(300),车辆(100)包括至少一个第一车轴和至少一个第二车轴,其中,在至少一个第一车轴上安装有车辆(100)的至少一个第一移动构件(R1),在至少一个第二车轴上安装有车辆(100)的至少一个第二移动构件(R2);车辆(100)还包括制动系统(200),制动系统(200)包括与所述至少一个第一车轴工作上相关联的第一组部件(201)和与所述至少一个第二车轴工作上相关联的第二组部件(201);车辆(100)包括至少一个牵引和再生制动供应模块(203),其被配置成
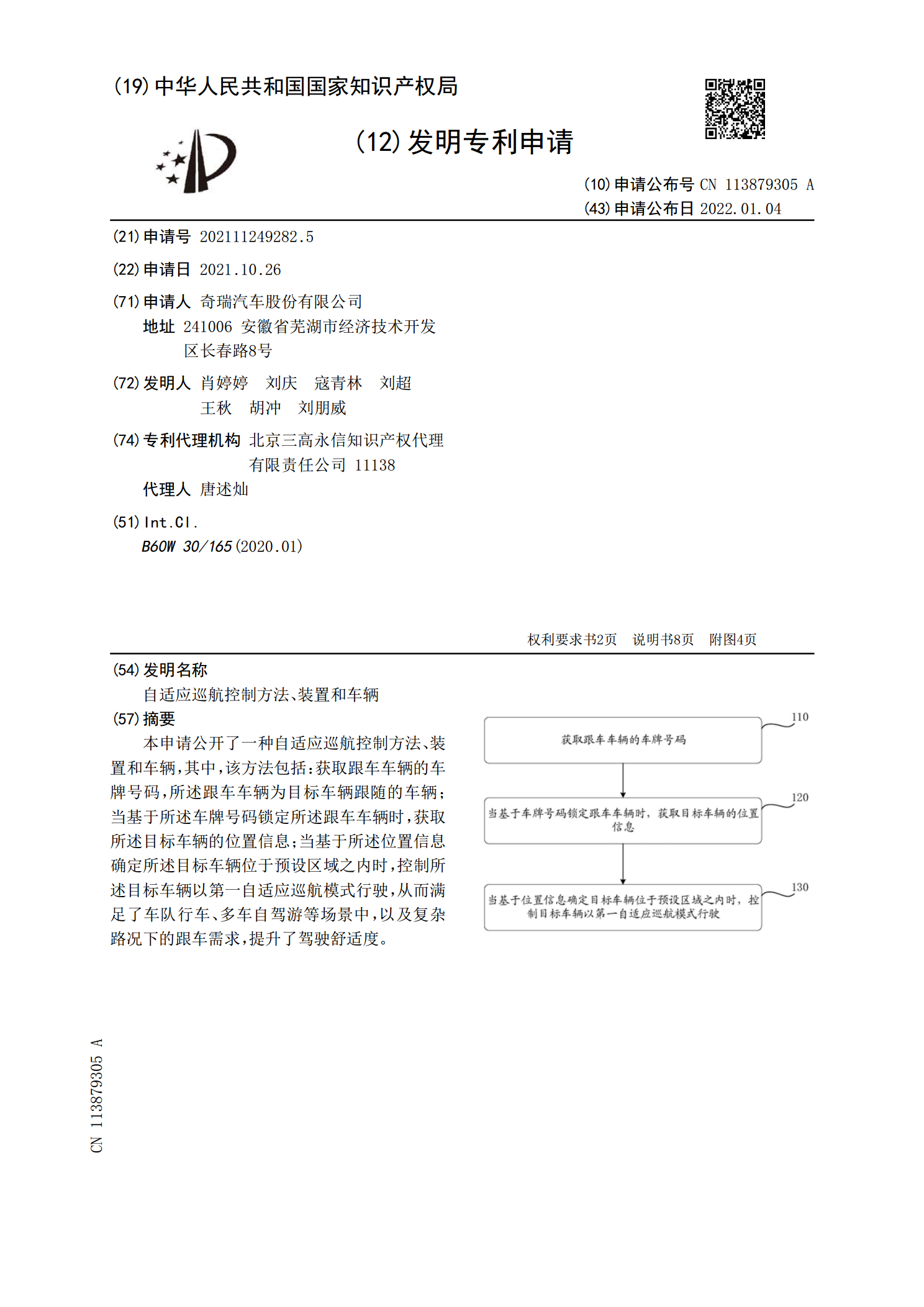
自适应巡航控制方法、装置和车辆.pdf
本申请公开了一种自适应巡航控制方法、装置和车辆,其中,该方法包括:获取跟车车辆的车牌号码,所述跟车车辆为目标车辆跟随的车辆;当基于所述车牌号码锁定所述跟车车辆时,获取所述目标车辆的位置信息;当基于所述位置信息确定所述目标车辆位于预设区域之内时,控制所述目标车辆以第一自适应巡航模式行驶,从而满足了车队行车、多车自驾游等场景中,以及复杂路况下的跟车需求,提升了驾驶舒适度。