
用于电动汽车的自适应巡航控制回馈制动扭矩监控方法.pdf

秀华****魔王

1/9

2/9

3/9

4/9
5/9

6/9

7/9
8/9
9/9
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

用于电动汽车的自适应巡航控制回馈制动扭矩监控方法.pdf
本发明提供了一种用于电动汽车的自适应巡航控制回馈制动扭矩监控方法,所述方法包括:当整车进入自适应巡航控制状态后,实时监控实际电机回馈制动扭矩和车辆当前车速;当目标电机回馈制动扭矩和所述实际电机回馈制动扭矩差值大于第一阀值,且在第一预设时间段内的积分值超过第二阀值,认为电机回馈制动不足以让整车达到合理的减速度,车辆稳定控制系统进入预填充阶段;当目标电机回馈制动扭矩和实际电机回馈制动扭矩差值大于第三阀值,且在第二预设时间段内的积分值超过第四阀值,则判断为需要车辆稳定控制系统提供液压制动。

电动汽车回馈制动扭矩的方法.pdf
本发明公开电动汽车回馈制动扭矩的方法,包括:通过预设的标定最大制动扭矩的参数表格,获得不同电机转速下不影响驾驶者正常驾驶感受的驾驶员制动扭矩需求,计算出对应的电池最大允许制动扭矩,与电机最大允许制动扭矩一起取最小者作为当前状态的回馈制动扭矩请求;计算当前所要输出的回馈制动扭矩T=T_0/N并执行一次输出;判定在ABS系统分别在始终未激活、激活、未激活且在此次制动过程中经历过ABS系统激活状态的情况下,分别在每个计算周期中逐步增大输出的回馈制动扭矩T,将上个计算周期计算得到的T的值减半后输出;保持上个计算周

用于优化自适应巡航控制中再生制动的系统和方法.pdf
公开了一种用于优化自适应巡航控制中再生制动的系统和方法。一种车辆包括:牵引车轮;电机,被构造为向牵引车轮提供再生制动扭矩;车轮制动器,被构造为向牵引车轮提供摩擦制动扭矩;以及至少一个动力源,被构造为向牵引车轮提供驱动扭矩。所述车辆还包括:传感器,被配置为检测前方对象;以及至少一个控制器。控制器被配置为根据自适应巡航控制(ACC)算法来控制动力源、车轮制动器和电机。所述ACC算法被配置为响应于检测到的前方对象和最大的再生制动距离,命令电机提供再生制动扭矩而不应用车轮制动器。所述最大的再生制动距离是基于动力传
一种驱动制动优化切换的电动汽车自适应巡航控制方法.pdf
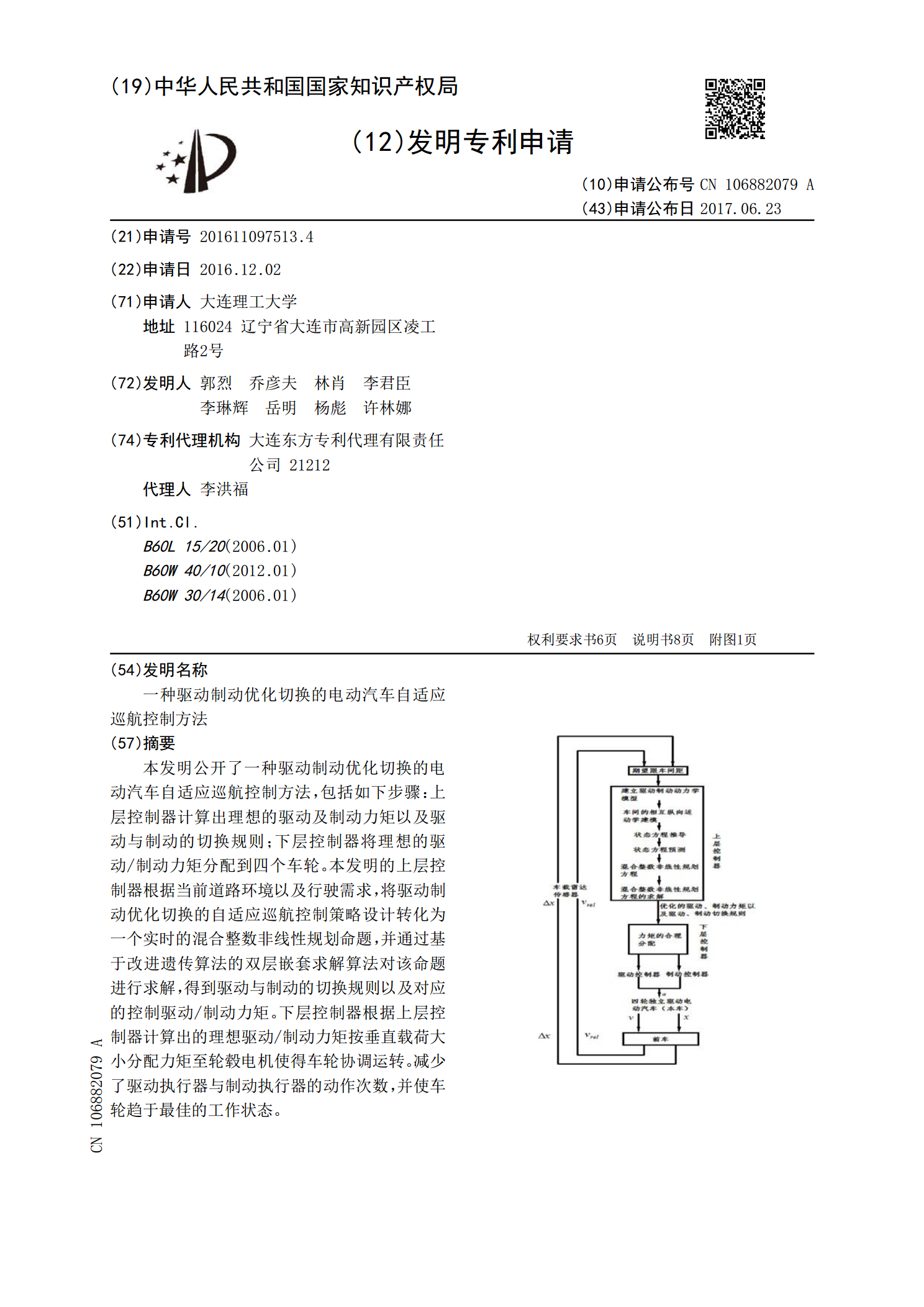
本发明公开了一种驱动制动优化切换的电动汽车自适应巡航控制方法,包括如下步骤:上层控制器计算出理想的驱动及制动力矩以及驱动与制动的切换规则;下层控制器将理想的驱动/制动力矩分配到四个车轮。本发明的上层控制器根据当前道路环境以及行驶需求,将驱动制动优化切换的自适应巡航控制策略设计转化为一个实时的混合整数非线性规划命题,并通过基于改进遗传算法的双层嵌套求解算法对该命题进行求解,得到驱动与制动的切换规则以及对应的控制驱动/制动力矩。下层控制器根据上层控制器计算出的理想驱动/制动力矩按垂直载荷大小分配力矩至轮毂电机

基于多目标优化的增程式电动汽车自适应制动回馈控制策略.pptx
添加副标题目录PART01PART02增程式电动汽车的特点自适应制动回馈控制策略的必要性控制策略的研究现状和发展趋势PART03多目标优化算法的原理和优势多目标优化算法在制动回馈控制中的应用实例多目标优化算法在制动回馈控制中的性能评估PART04控制策略的设计思路和框架控制策略的关键技术问题及解决方案控制策略的实现过程和实验验证PART05控制策略的性能评价指标体系控制策略在不同工况下的性能表现控制策略的鲁棒性和稳定性分析PART06控制策略的优化目标和方向控制策略的未来发展趋势和展望感谢您的观看