
可移动装置的控制方法及系统.pdf

一只****写意


1/10

2/10
3/10
4/10

5/10

6/10

7/10

8/10

9/10
10/10
亲,该文档总共14页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
可移动装置的控制方法及系统.pdf
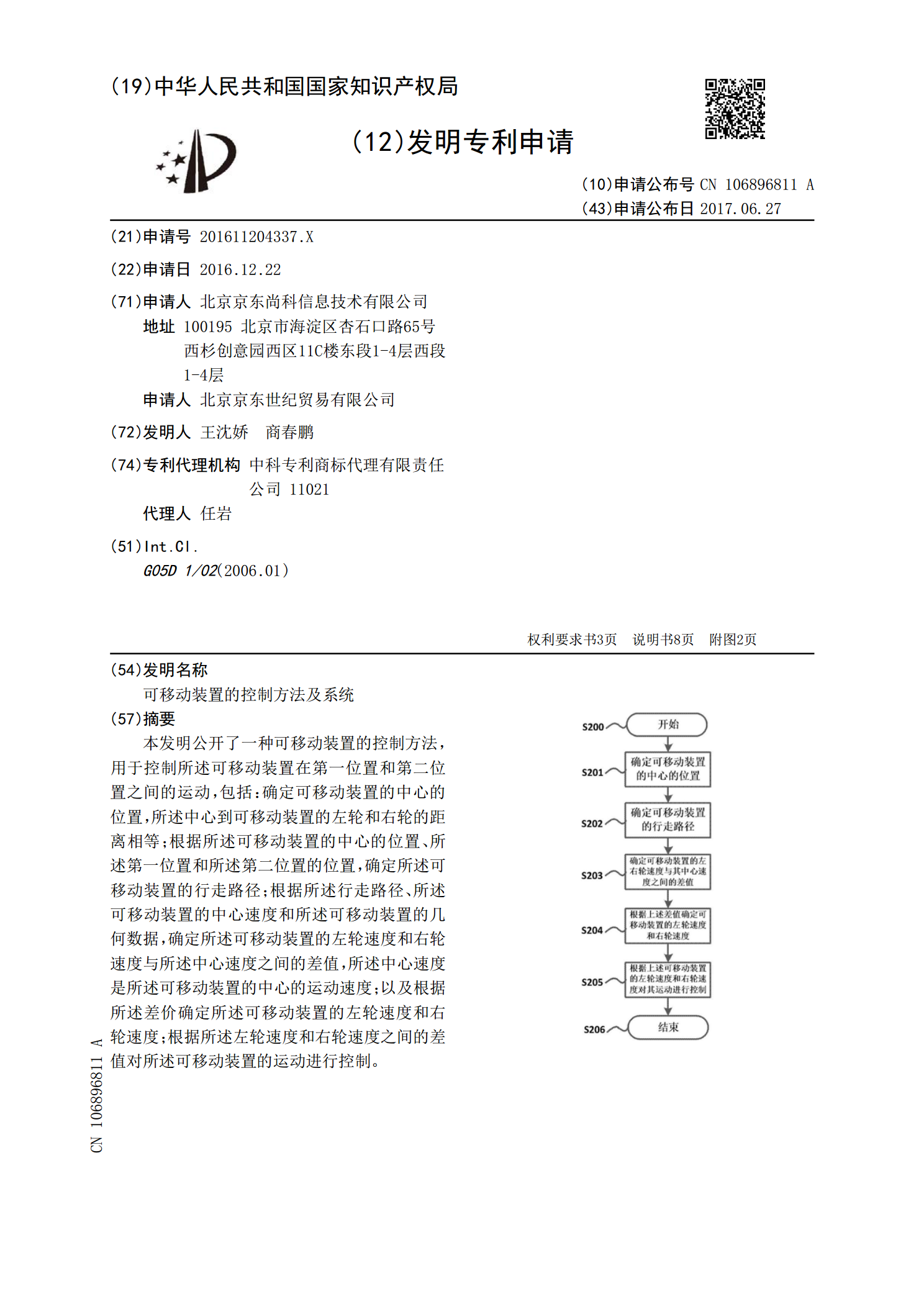
本发明公开了一种可移动装置的控制方法,用于控制所述可移动装置在第一位置和第二位置之间的运动,包括:确定可移动装置的中心的位置,所述中心到可移动装置的左轮和右轮的距离相等;根据所述可移动装置的中心的位置、所述第一位置和所述第二位置的位置,确定所述可移动装置的行走路径;根据所述行走路径、所述可移动装置的中心速度和所述可移动装置的几何数据,确定所述可移动装置的左轮速度和右轮速度与所述中心速度之间的差值,所述中心速度是所述可移动装置的中心的运动速度;以及根据所述差价确定所述可移动装置的左轮速度和右轮速度;根据所述

可移动装置、移动拍摄设备、可移动装置控制系统及方法.pdf
一种可移动装置(100),包括底盘(10)以及与所述底盘(10)连接的多个车轮组件(20)。每一个所述车轮组件(20)包括轮体(21)以及驱动机构(22)。所述驱动机构(22)包括用于驱动所述轮体(21)包括第一驱动件(221)以及第二驱动件(222)。所述第一驱动件(221)用于驱动所述轮体(21)转向以改变所述可移动装置(100)的移动方向。所述第二驱动件(222)用于驱动所述轮体(21)轴向转动以带动所述可移动装置(100)移动。每一个所述轮体(21)分别由对应的所述第一驱动件(221)以及第二驱动
可移动装置的控制方法、控制装置以及可移动系统.pdf
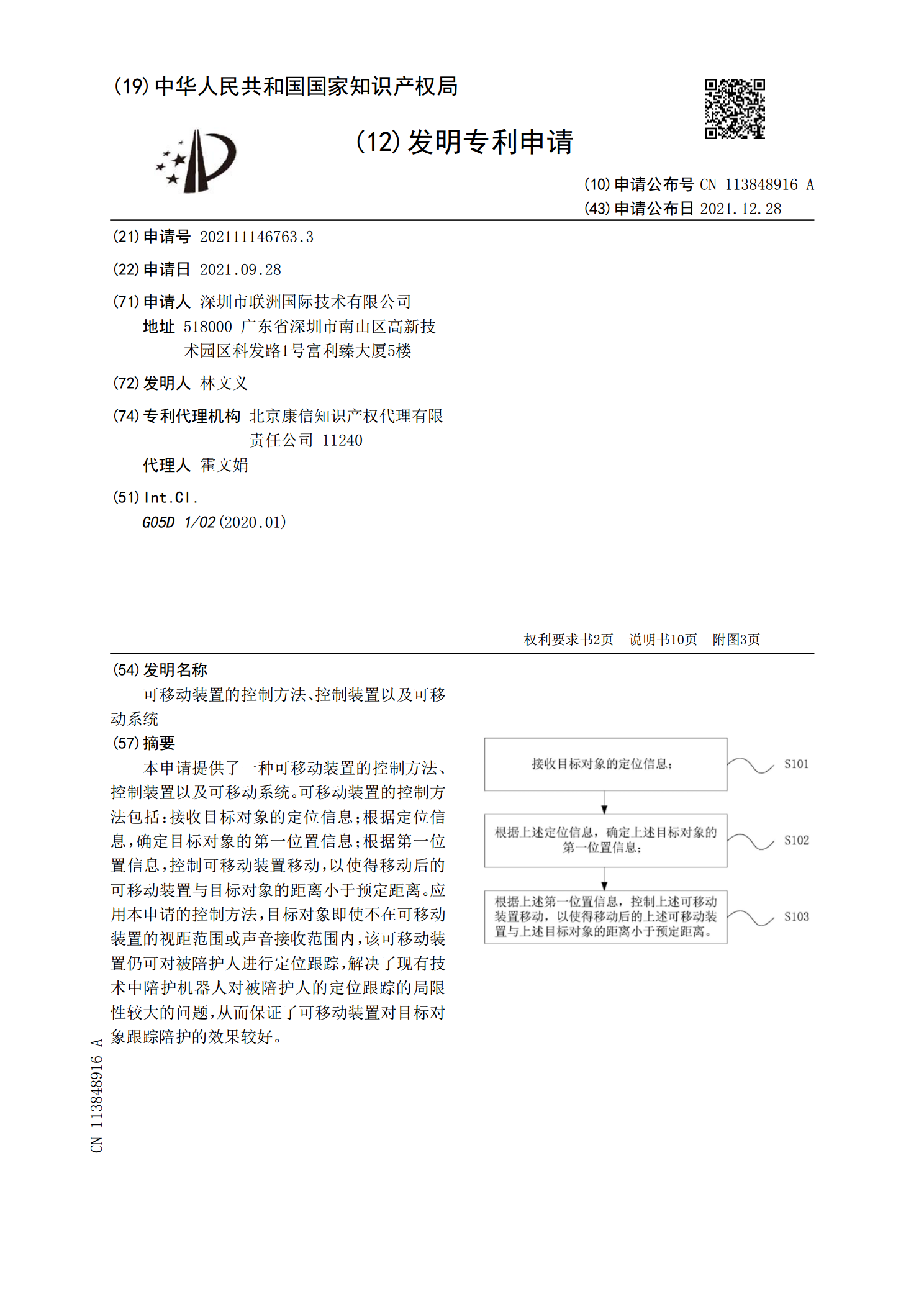
本申请提供了一种可移动装置的控制方法、控制装置以及可移动系统。可移动装置的控制方法包括:接收目标对象的定位信息;根据定位信息,确定目标对象的第一位置信息;根据第一位置信息,控制可移动装置移动,以使得移动后的可移动装置与目标对象的距离小于预定距离。应用本申请的控制方法,目标对象即使不在可移动装置的视距范围或声音接收范围内,该可移动装置仍可对被陪护人进行定位跟踪,解决了现有技术中陪护机器人对被陪护人的定位跟踪的局限性较大的问题,从而保证了可移动装置对目标对象跟踪陪护的效果较好。
可移动装置、控制终端、利用可移动装置中的红外热像仪测温的方法以及可移动系统.pdf
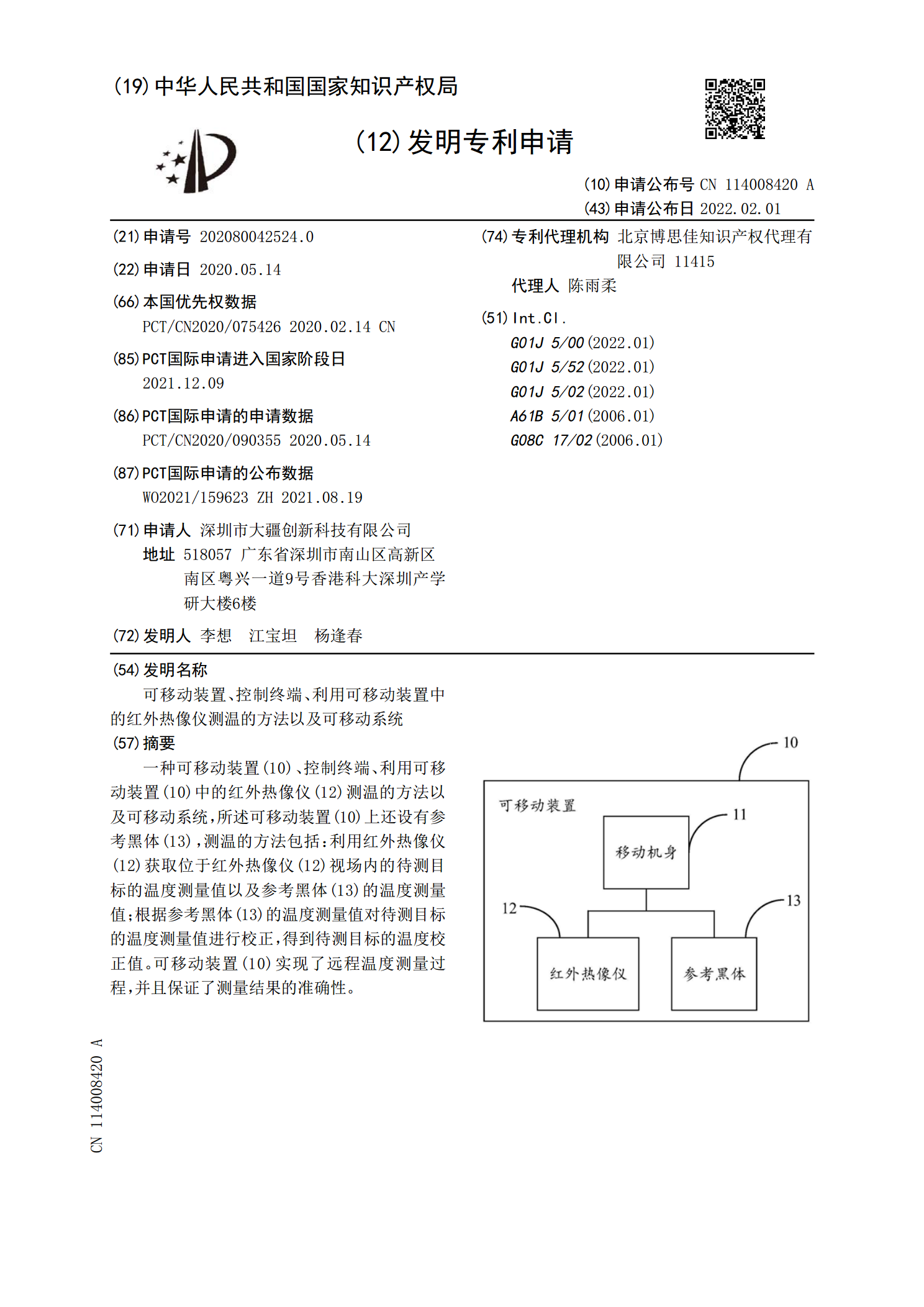
一种可移动装置(10)、控制终端、利用可移动装置(10)中的红外热像仪(12)测温的方法以及可移动系统,所述可移动装置(10)上还设有参考黑体(13),测温的方法包括:利用红外热像仪(12)获取位于红外热像仪(12)视场内的待测目标的温度测量值以及参考黑体(13)的温度测量值;根据参考黑体(13)的温度测量值对待测目标的温度测量值进行校正,得到待测目标的温度校正值。可移动装置(10)实现了远程温度测量过程,并且保证了测量结果的准确性。
自移动装置控制方法、装置、系统、介质及自移动装置.pdf
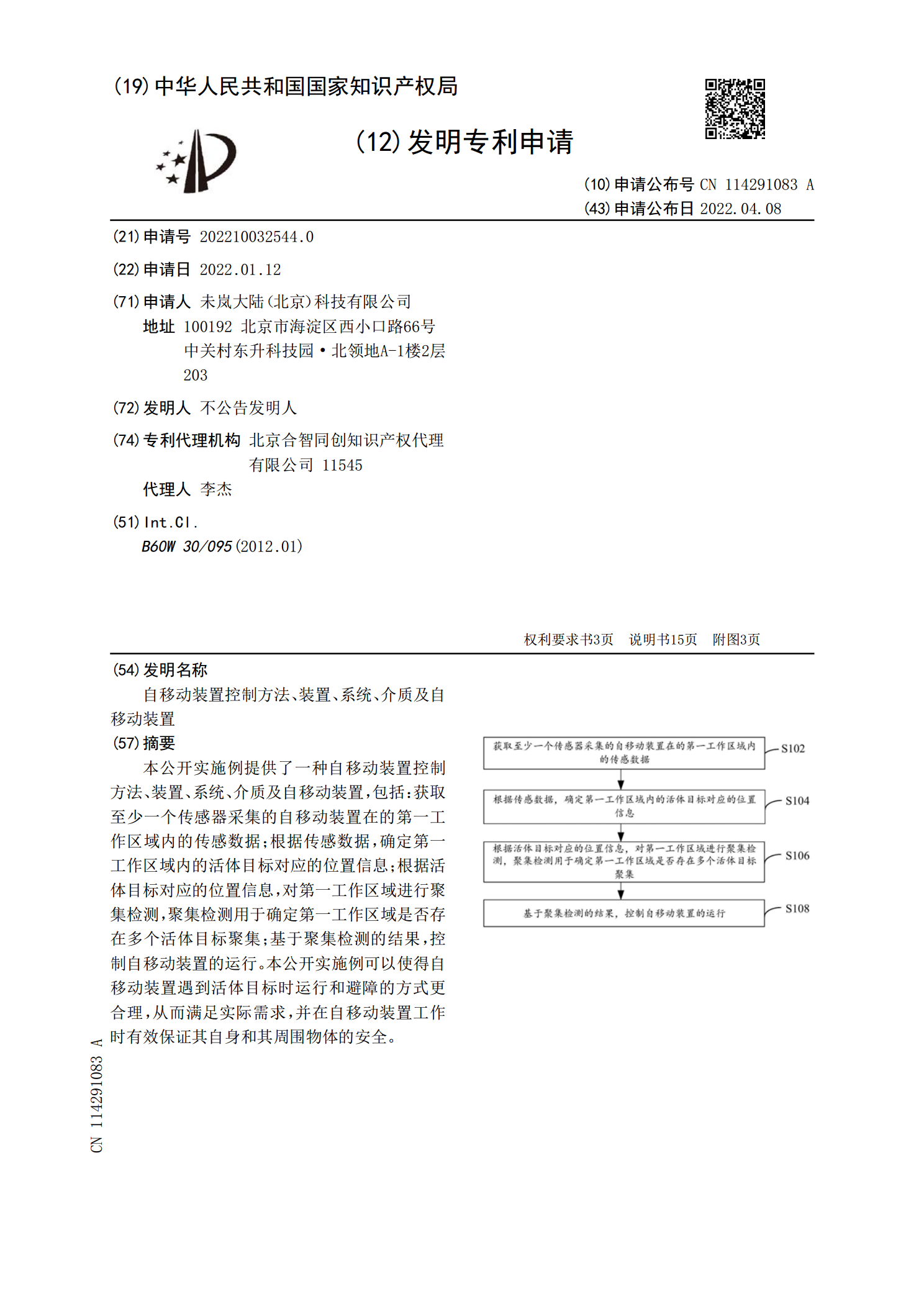
本公开实施例提供了一种自移动装置控制方法、装置、系统、介质及自移动装置,包括:获取至少一个传感器采集的自移动装置在的第一工作区域内的传感数据;根据传感数据,确定第一工作区域内的活体目标对应的位置信息;根据活体目标对应的位置信息,对第一工作区域进行聚集检测,聚集检测用于确定第一工作区域是否存在多个活体目标聚集;基于聚集检测的结果,控制自移动装置的运行。本公开实施例可以使得自移动装置遇到活体目标时运行和避障的方式更合理,从而满足实际需求,并在自移动装置工作时有效保证其自身和其周围物体的安全。