
自移动装置控制方法、装置、系统、介质及自移动装置.pdf

努力****恨风

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共22页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
自移动装置控制方法、装置、系统、介质及自移动装置.pdf
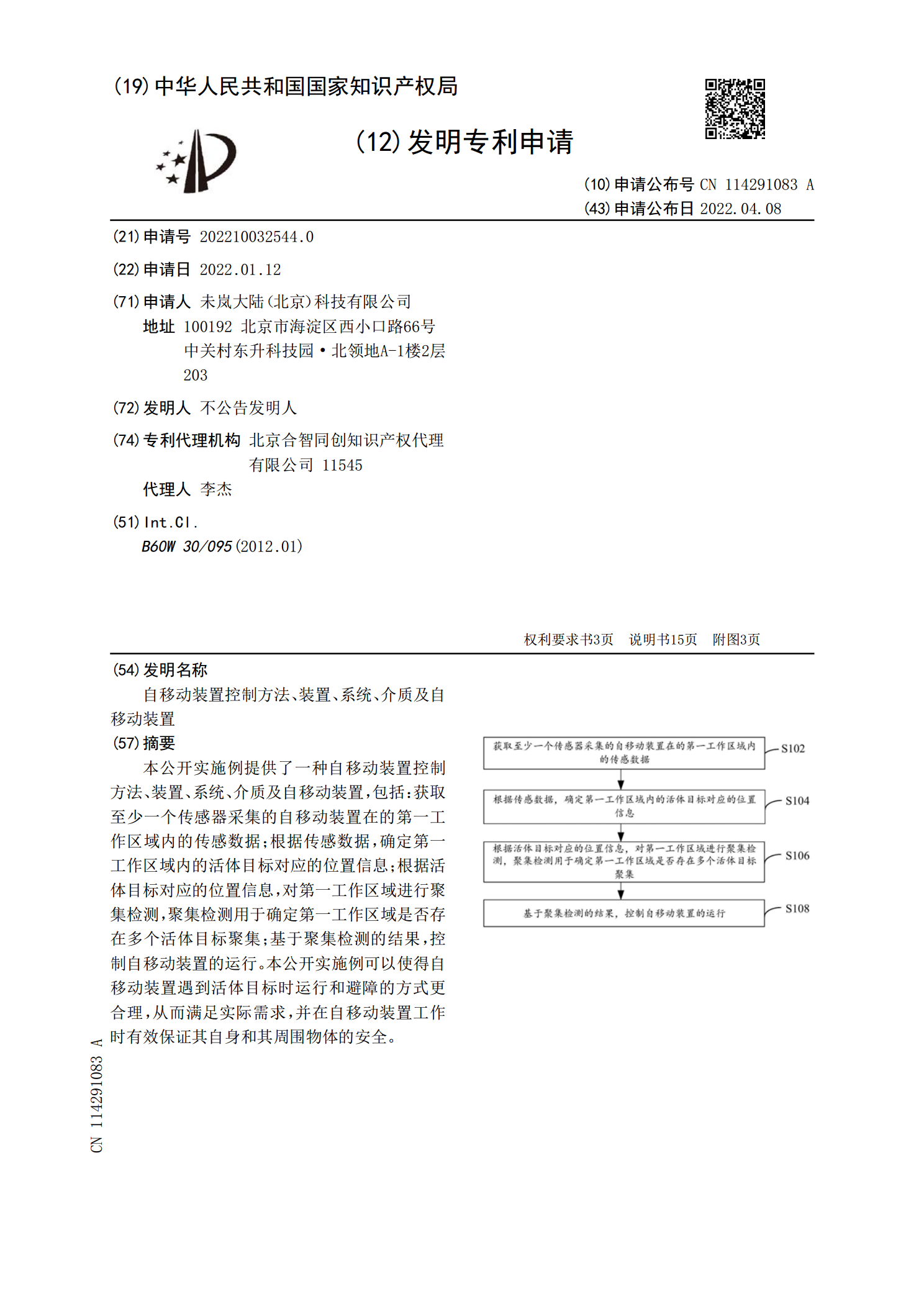
本公开实施例提供了一种自移动装置控制方法、装置、系统、介质及自移动装置,包括:获取至少一个传感器采集的自移动装置在的第一工作区域内的传感数据;根据传感数据,确定第一工作区域内的活体目标对应的位置信息;根据活体目标对应的位置信息,对第一工作区域进行聚集检测,聚集检测用于确定第一工作区域是否存在多个活体目标聚集;基于聚集检测的结果,控制自移动装置的运行。本公开实施例可以使得自移动装置遇到活体目标时运行和避障的方式更合理,从而满足实际需求,并在自移动装置工作时有效保证其自身和其周围物体的安全。
自移动装置.pdf
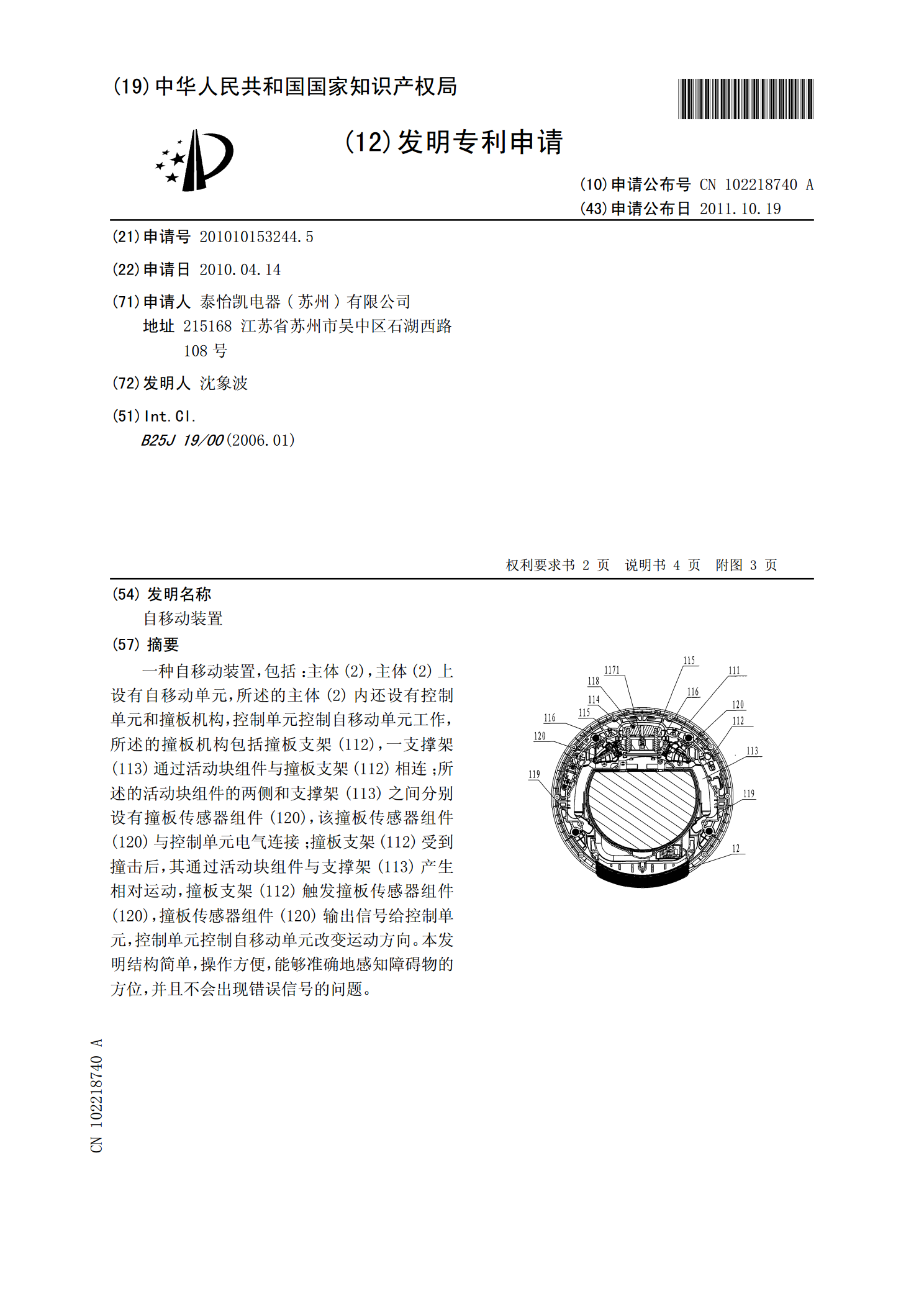
一种自移动装置,包括:主体(2),主体(2)上设有自移动单元,所述的主体(2)内还设有控制单元和撞板机构,控制单元控制自移动单元工作,所述的撞板机构包括撞板支架(112),一支撑架(113)通过活动块组件与撞板支架(112)相连;所述的活动块组件的两侧和支撑架(113)之间分别设有撞板传感器组件(120),该撞板传感器组件(120)与控制单元电气连接;撞板支架(112)受到撞击后,其通过活动块组件与支撑架(113)产生相对运动,撞板支架(112)触发撞板传感器组件(120),撞板传感器组件(120)输出信

移动装置的运行控制方法、装置、存储介质及移动装置.pdf
本发明提供了一种移动装置的运行控制方法、装置、存储介质及移动装置,方法包括:获取自动导航移动装置的行驶路线信息,所述行驶路线信息包括信息码的位置;判断所述自动导航移动装置是否行驶到所述信息码的位置处,响应于确定所述自动导航移动装置行驶到所述信息码的位置处,控制读码模块读取信息码的信息;若所述读码模块读取到所述信息码的信息,则控制所述自动导航移动装置继续行驶;若所述读码模块未读取到所述信息码的信息,则控制所述自动导航移动装置停止行驶,控制所述读码模块重启,重新读取所述信息码的信息。本发明的技术方案能够提高读

吸附式自移动装置.pdf
一种吸附式自移动装置,包括机体(1),机体设有吸盘(2)、驱动单元和控制单元,吸盘设置在机体底部,驱动单元在控制单元控制下驱动机体在作业面上移动,所述吸附式自移动装置包括弹性支撑轮组件(3),该组件设置在机体底部;所述吸附式自移动装置还包括摩擦垫(4),所述摩擦垫能够随着吸盘放气而与作业面紧压,从而增大机体与作业面之间的摩擦力;当吸盘处于负压吸附状态时,所述弹性支撑轮组件处于压紧收缩的第一工作位置;当吸盘处于泄气状态时,所述弹性支撑轮组件处于伸展的第二工作位置,摩擦垫脱离作业面。本发明支撑轮能减小吸盘与作
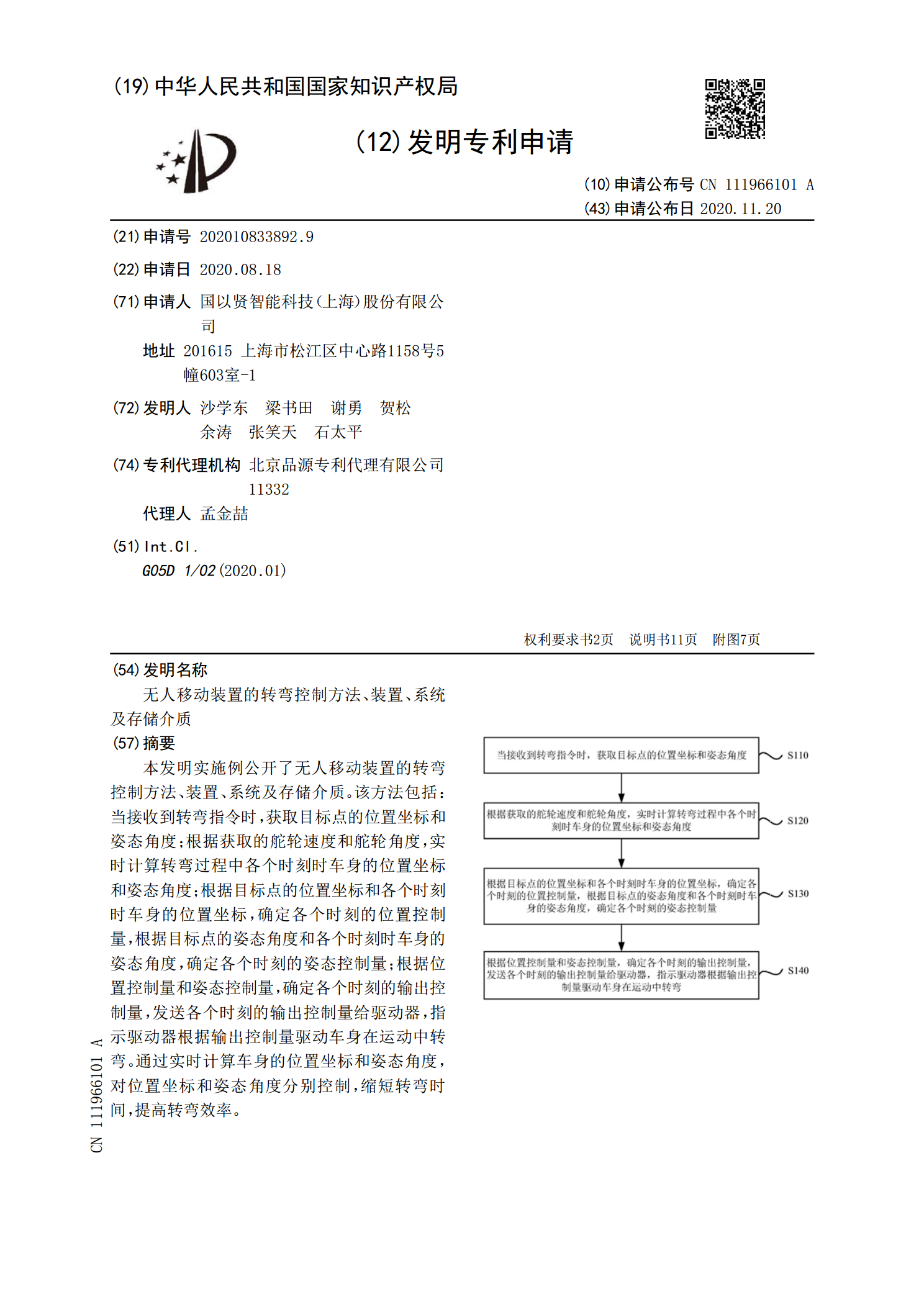
无人移动装置的转弯控制方法、装置、系统及存储介质.pdf
本发明实施例公开了无人移动装置的转弯控制方法、装置、系统及存储介质。该方法包括:当接收到转弯指令时,获取目标点的位置坐标和姿态角度;根据获取的舵轮速度和舵轮角度,实时计算转弯过程中各个时刻时车身的位置坐标和姿态角度;根据目标点的位置坐标和各个时刻时车身的位置坐标,确定各个时刻的位置控制量,根据目标点的姿态角度和各个时刻时车身的姿态角度,确定各个时刻的姿态控制量;根据位置控制量和姿态控制量,确定各个时刻的输出控制量,发送各个时刻的输出控制量给驱动器,指示驱动器根据输出控制量驱动车身在运动中转弯。通过实时计算