
一种商品载运减震自动抓取机器人.pdf

论文****轩吖


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共15页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种商品载运减震自动抓取机器人.pdf
一种商品载运减震自动抓取机器人,包括运动机构和设置在运动机构上的抓取机构,其中运动机构包括底盘以及对称设置在底盘上的两个结构相同的X型减震系统模块;抓取机构包括机械臂运动模块以及设置在机械臂运动模块上用于抓取包裹的机械臂抓手模块;底盘的一侧设置有两个麦克纳姆全向轮,另一侧对称设置两个麦克纳姆全向轮;预设包裹相应坐标位置,机器人收到取包裹指令后将自动运行到包裹周围,将其抓起并摆放到平台上。之后按设定运动到指定位置,完成商品载运过程,本发明机构简单紧凑易于实现,可在配送点以及库房等场所取放包裹,减轻快递员包裹

一种自动抓取的搬运机器人.pdf
本发明提供一种自动抓取的搬运机器人,涉及智能机器人领域,包括基座,基座的顶部固定安装有转动箱,转动箱内腔的底部固定安装有第一电机,第一电机通过其一端的转轴传动连接有主动轮,电机的左侧设置有转动轴,转动轴中部的外表面固定安装有与主动轮相啮合的从动轮。该自动抓取的搬运机器人,通过在连接板的底部固定安装吸盘,能使该装置在抓取物品时,先通过吸盘将物品稍稍提起,再通过连接箱两侧铰接的连接杆相互靠近,使左夹板和右夹板相互闭合,可以防止搬运的物品过重,使吸盘掉落,避免物品掉落到地上,导致损坏,通过在支撑板的底部安装栏杆

一种自动装载卸载运输机器人.pdf
本发明涉及一种机器人,更具体的说是一种自动装载卸载运输机器人,旋转机构的蜗杆蜗轮的减速比大,输出扭矩大,可保证连杆机构低平稳速运动,蜗杆蜗轮可自锁,保证了断电时连杆位置的稳定保持,不会出现由重力引起的运动,防止工作过程中货物掉落伤人或货物自身损坏,张紧带轮组合可调节履带的松紧,防止其与齿轮咬合过松而掉落。主体支撑架安装于移动组合的上侧,主体支撑架与移动组合焊接,装载叉组合安装于主体支撑架侧面,装载叉组合与主体支撑架焊接,装载叉组合安装于挡料围栏侧面,挡料围栏安装于主体支撑架的上侧,挡料围栏与主体支撑架焊接
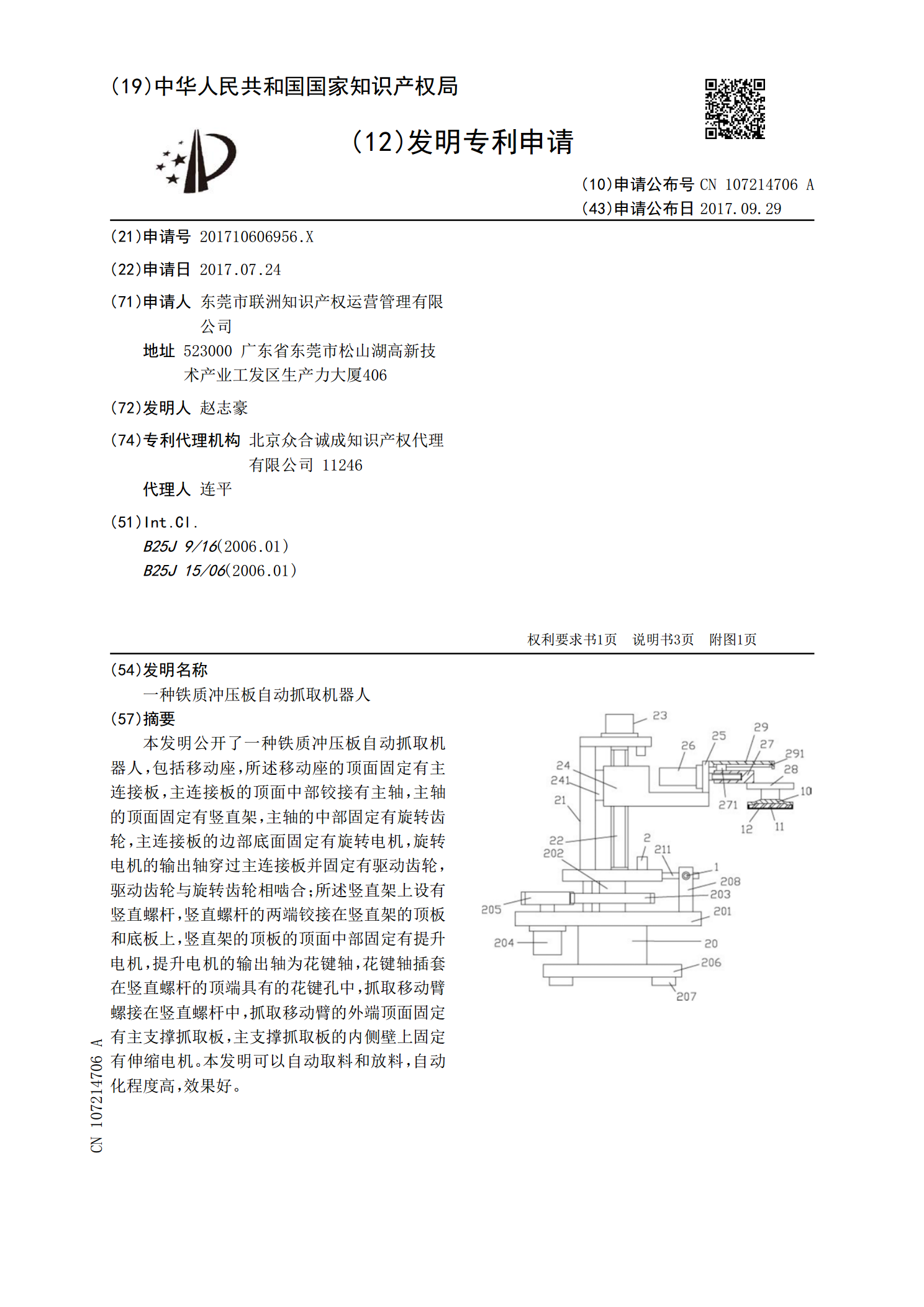
一种铁质冲压板自动抓取机器人.pdf
本发明公开了一种铁质冲压板自动抓取机器人,包括移动座,所述移动座的顶面固定有主连接板,主连接板的顶面中部铰接有主轴,主轴的顶面固定有竖直架,主轴的中部固定有旋转齿轮,主连接板的边部底面固定有旋转电机,旋转电机的输出轴穿过主连接板并固定有驱动齿轮,驱动齿轮与旋转齿轮相啮合;所述竖直架上设有竖直螺杆,竖直螺杆的两端铰接在竖直架的顶板和底板上,竖直架的顶板的顶面中部固定有提升电机,提升电机的输出轴为花键轴,花键轴插套在竖直螺杆的顶端具有的花键孔中,抓取移动臂螺接在竖直螺杆中,抓取移动臂的外端顶面固定有主支撑抓取
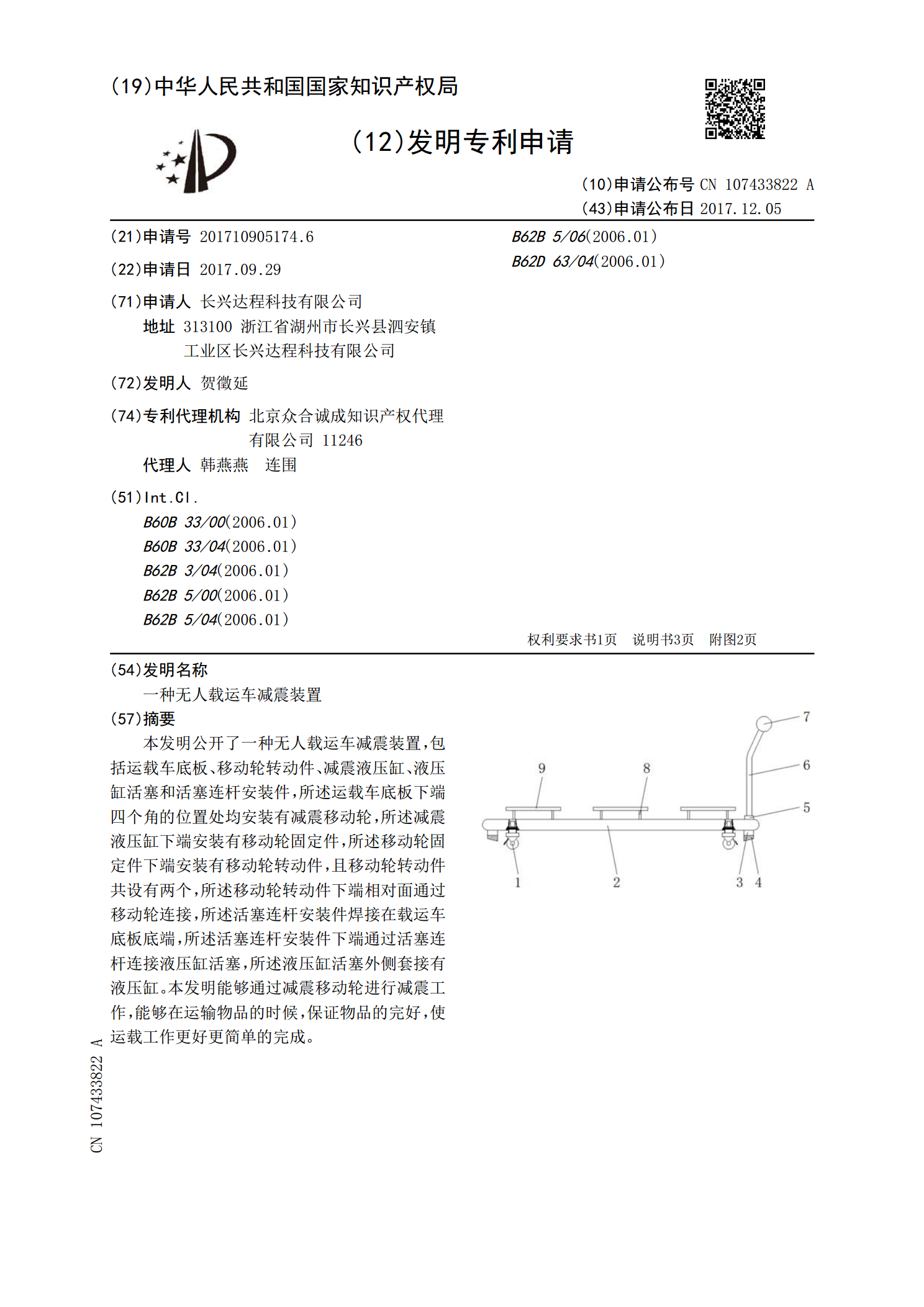
一种无人载运车减震装置.pdf
本发明公开了一种无人载运车减震装置,包括运载车底板、移动轮转动件、减震液压缸、液压缸活塞和活塞连杆安装件,所述运载车底板下端四个角的位置处均安装有减震移动轮,所述减震液压缸下端安装有移动轮固定件,所述移动轮固定件下端安装有移动轮转动件,且移动轮转动件共设有两个,所述移动轮转动件下端相对面通过移动轮连接,所述活塞连杆安装件焊接在载运车底板底端,所述活塞连杆安装件下端通过活塞连杆连接液压缸活塞,所述液压缸活塞外侧套接有液压缸。本发明能够通过减震移动轮进行减震工作,能够在运输物品的时候,保证物品的完好,使运载工