
一种铁质冲压板自动抓取机器人.pdf

兴朝****45


1/6

2/6

3/6

4/6

5/6

6/6
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种铁质冲压板自动抓取机器人.pdf
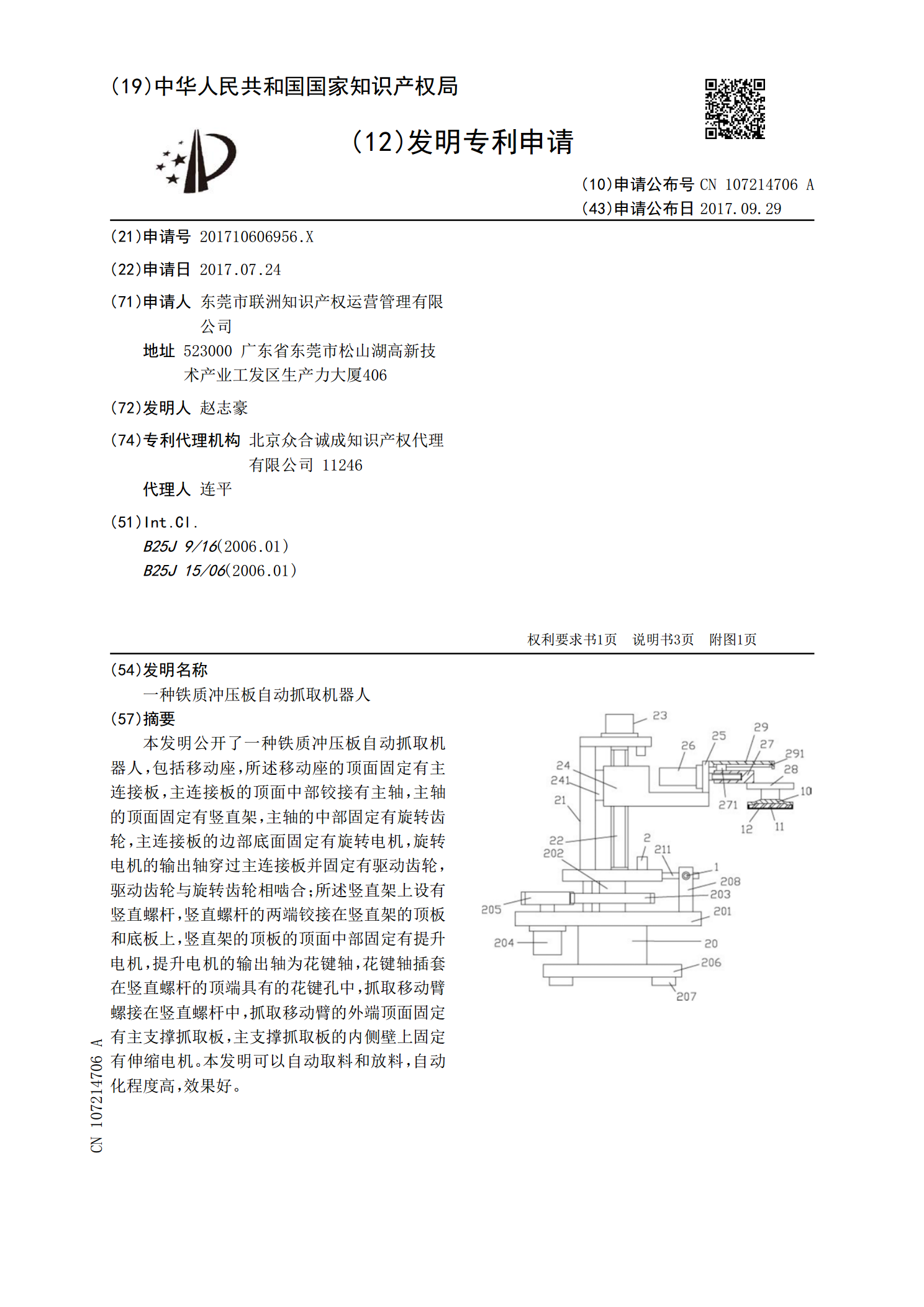
本发明公开了一种铁质冲压板自动抓取机器人,包括移动座,所述移动座的顶面固定有主连接板,主连接板的顶面中部铰接有主轴,主轴的顶面固定有竖直架,主轴的中部固定有旋转齿轮,主连接板的边部底面固定有旋转电机,旋转电机的输出轴穿过主连接板并固定有驱动齿轮,驱动齿轮与旋转齿轮相啮合;所述竖直架上设有竖直螺杆,竖直螺杆的两端铰接在竖直架的顶板和底板上,竖直架的顶板的顶面中部固定有提升电机,提升电机的输出轴为花键轴,花键轴插套在竖直螺杆的顶端具有的花键孔中,抓取移动臂螺接在竖直螺杆中,抓取移动臂的外端顶面固定有主支撑抓取

一种自动抓取的搬运机器人.pdf
本发明提供一种自动抓取的搬运机器人,涉及智能机器人领域,包括基座,基座的顶部固定安装有转动箱,转动箱内腔的底部固定安装有第一电机,第一电机通过其一端的转轴传动连接有主动轮,电机的左侧设置有转动轴,转动轴中部的外表面固定安装有与主动轮相啮合的从动轮。该自动抓取的搬运机器人,通过在连接板的底部固定安装吸盘,能使该装置在抓取物品时,先通过吸盘将物品稍稍提起,再通过连接箱两侧铰接的连接杆相互靠近,使左夹板和右夹板相互闭合,可以防止搬运的物品过重,使吸盘掉落,避免物品掉落到地上,导致损坏,通过在支撑板的底部安装栏杆

一种商品载运减震自动抓取机器人.pdf
一种商品载运减震自动抓取机器人,包括运动机构和设置在运动机构上的抓取机构,其中运动机构包括底盘以及对称设置在底盘上的两个结构相同的X型减震系统模块;抓取机构包括机械臂运动模块以及设置在机械臂运动模块上用于抓取包裹的机械臂抓手模块;底盘的一侧设置有两个麦克纳姆全向轮,另一侧对称设置两个麦克纳姆全向轮;预设包裹相应坐标位置,机器人收到取包裹指令后将自动运行到包裹周围,将其抓起并摆放到平台上。之后按设定运动到指定位置,完成商品载运过程,本发明机构简单紧凑易于实现,可在配送点以及库房等场所取放包裹,减轻快递员包裹
一种铁质组件冲裁模具.pdf
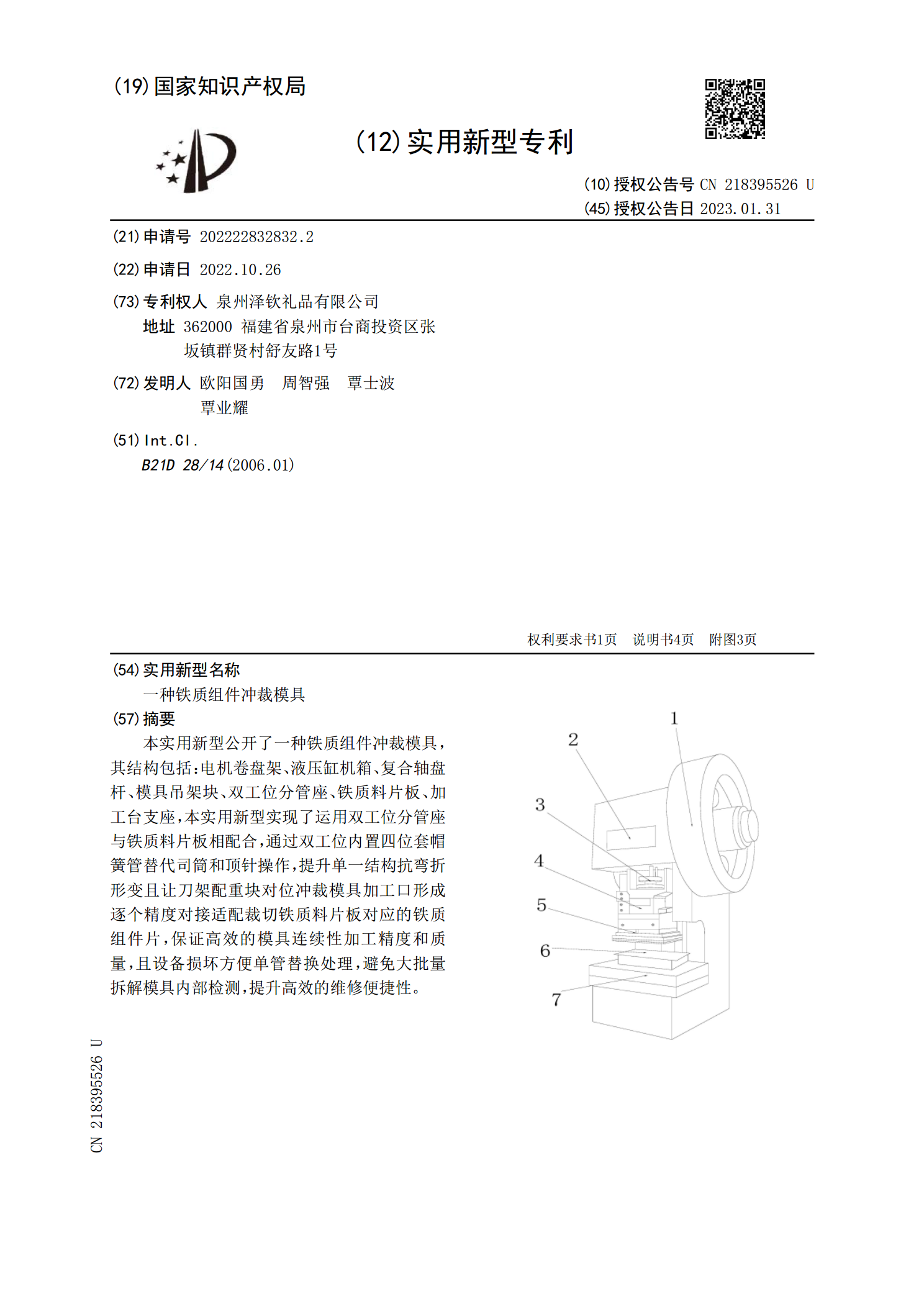
本实用新型公开了一种铁质组件冲裁模具,其结构包括:电机卷盘架、液压缸机箱、复合轴盘杆、模具吊架块、双工位分管座、铁质料片板、加工台支座,本实用新型实现了运用双工位分管座与铁质料片板相配合,通过双工位内置四位套帽簧管替代司筒和顶针操作,提升单一结构抗弯折形变且让刀架配重块对位冲裁模具加工口形成逐个精度对接适配裁切铁质料片板对应的铁质组件片,保证高效的模具连续性加工精度和质量,且设备损坏方便单管替换处理,避免大批量拆解模具内部检测,提升高效的维修便捷性。

一种自动化工业机器人追踪抓取机构.pdf
本发明公开了一种自动化工业机器人追踪抓取机构,包括支撑架和挤压垫,所述支撑架顶部安装有移动机构,其中,所述移动机构一侧连接有滑动块,所述滑动块底部安装有第一气缸,所述第一气缸一端连接有连接块,所述连接块一侧开设有螺纹槽。该自动化工业机器人追踪抓取机构设置有旋转环能够通过拉动第一固定块与连接块进行对接滑动,以便旋转环、第一固定块与连接块滑动时旋转环可以带动螺纹环与螺纹槽进行对接,螺纹环与螺纹槽对接时可以转动旋转环可以带动旋转块与旋转槽进行旋转,旋转环转动的同时可以带动螺纹环与螺纹槽进行螺纹滑动,当螺纹环螺纹