
转向控制装置和转向控制方法.pdf

文光****iu


1/10
2/10

3/10
4/10
5/10

6/10
7/10
8/10

9/10

10/10
亲,该文档总共24页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
转向控制装置和转向控制方法.pdf
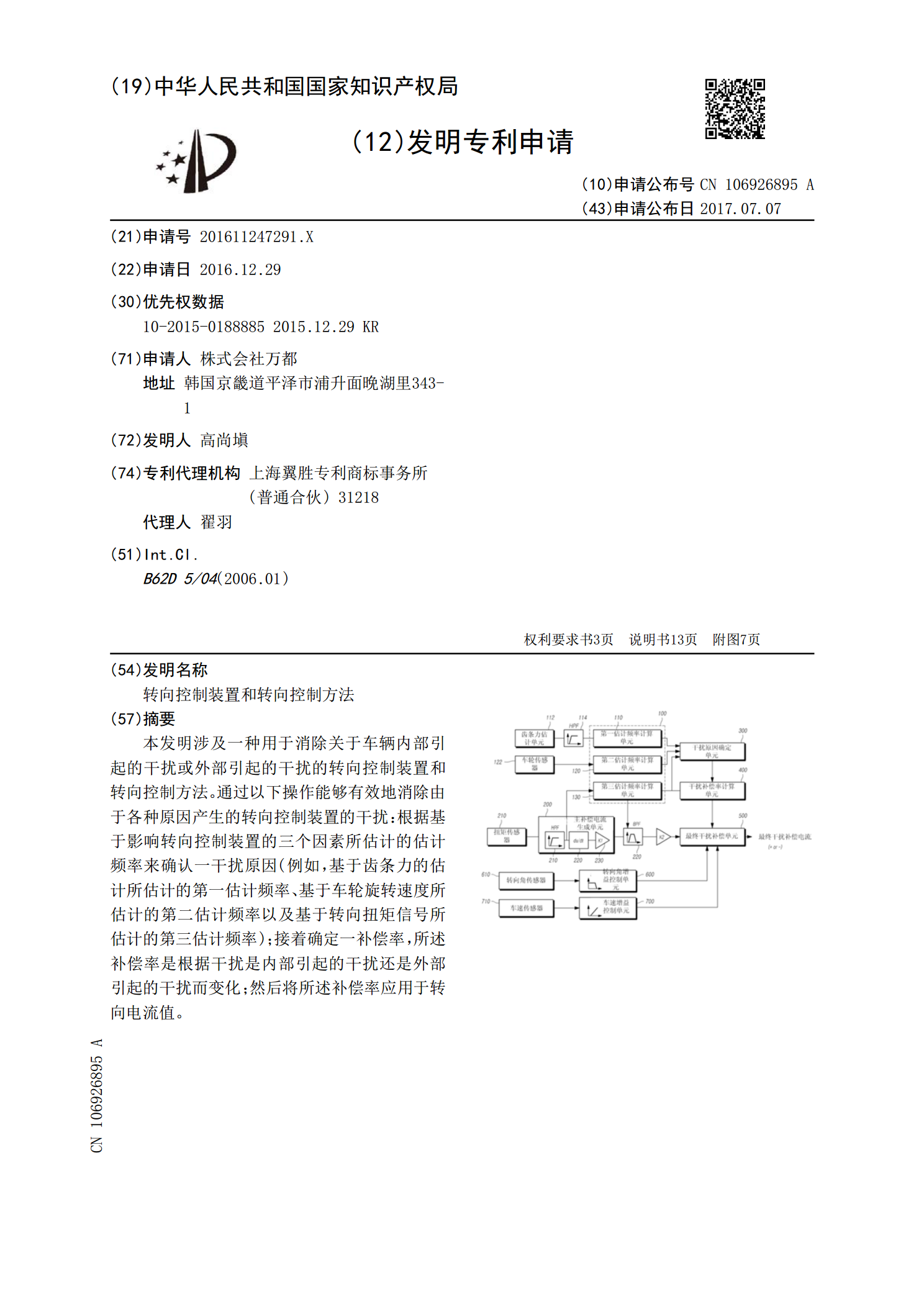
本发明涉及一种用于消除关于车辆内部引起的干扰或外部引起的干扰的转向控制装置和转向控制方法。通过以下操作能够有效地消除由于各种原因产生的转向控制装置的干扰:根据基于影响转向控制装置的三个因素所估计的估计频率来确认一干扰原因(例如,基于齿条力的估计所估计的第一估计频率、基于车轮旋转速度所估计的第二估计频率以及基于转向扭矩信号所估计的第三估计频率);接着确定一补偿率,所述补偿率是根据干扰是内部引起的干扰还是外部引起的干扰而变化;然后将所述补偿率应用于转向电流值。

车辆的转向控制装置和转向控制方法.pdf
本发明具备:转向马达(2),其输出用于使转向轮转动的转向扭矩;转向马达角度传感器(16),其检测转向马达(2)的旋转角度;转向马达驱动电流供给部,其向转向马达(2)供给用于使转向轮的转向角成为与方向盘的操作相应的角度的转向马达驱动电流;设定旋转角存储部,其预先存储与设定转向角对应的、作为转向马达(2)的旋转角度的设定旋转角度,该设定转向角设定为比转向轮能够转动的极限的转向角小的角度;以及电流供给量限制部,其对转向马达驱动电流的供给量进行限制以避免转向马达角度传感器(16)所检测出的旋转角度超过预先存储在设

车辆的转向控制装置和转向控制方法.pdf
本发明提供一种能够抑制在驱动源启动时转向操作器的转向操作状态违背驾驶员的意图的车辆的转向控制装置和转向控制方法。使能够切换将扭矩传递路径机械分离的分离状态和将扭矩传递路径机械连结的接合状态的备用离合器在发动机启动时为接合状态,当在发动机启动后检测出的转向扭矩为离合器分离开始扭矩Ts1以下时,将接合状态的备用离合器切换为分离状态,当使备用离合器的状态为接合状态时,通过由使转向轮转向的转轮马达输出与转向操作器的操作相应地辅助转向轮转向的转轮辅助扭矩,当将接合状态的备用离合器切换为分离状态时,通过转轮马达输出与

转向控制装置、转向控制方法和包括该转向控制装置的转向支持系统.pdf
公开了一种转向控制装置、转向控制方法和包括转向控制装置的转向支持系统。特别地,根据本公开的转向控制装置包括:命令值计算单元,用于基于与方向盘的旋转对应的转向信息来计算命令齿条的移动的齿条移动命令值;差值计算单元,用于通过在感测到齿条的移动时接收与齿条的移动对应的齿条移动感测值来计算齿条移动命令值和齿条移动感测值之间的差值;以及反应扭矩计算单元,用于基于差值和一个或多个预设的虚拟连杆参数来计算反应扭矩。

转向控制装置及转向控制方法.pdf
本发明根据一实施例提供一种转向控制装置,包含:一检测单元,配置以检测被定位在一前轮中的一主动齿轮的角度、一柱转矩及一电动机电流;一频率推算单元,配置以基于所述主动齿轮的角度、所述柱转矩或所述电动机电流中的至少一个来推算通过交通工具行驶在道路而产生的一道路表面频率;一齿条力推算单元,配置以基于所述主动齿轮的角度、所述柱转矩或所述电动机电流中的至少一个来推算一齿条力;及一控制单元,配置以基于所述道路表面频率来提取被包含在所述齿条力中的一道路表面信息,以及被配置用以基于所述道路表面信息及所述齿条力而控制一转向装