
无人搬运车的控制方法和装置.pdf

爱欢****23


1/10

2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共28页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
无人搬运车的控制方法和装置.pdf
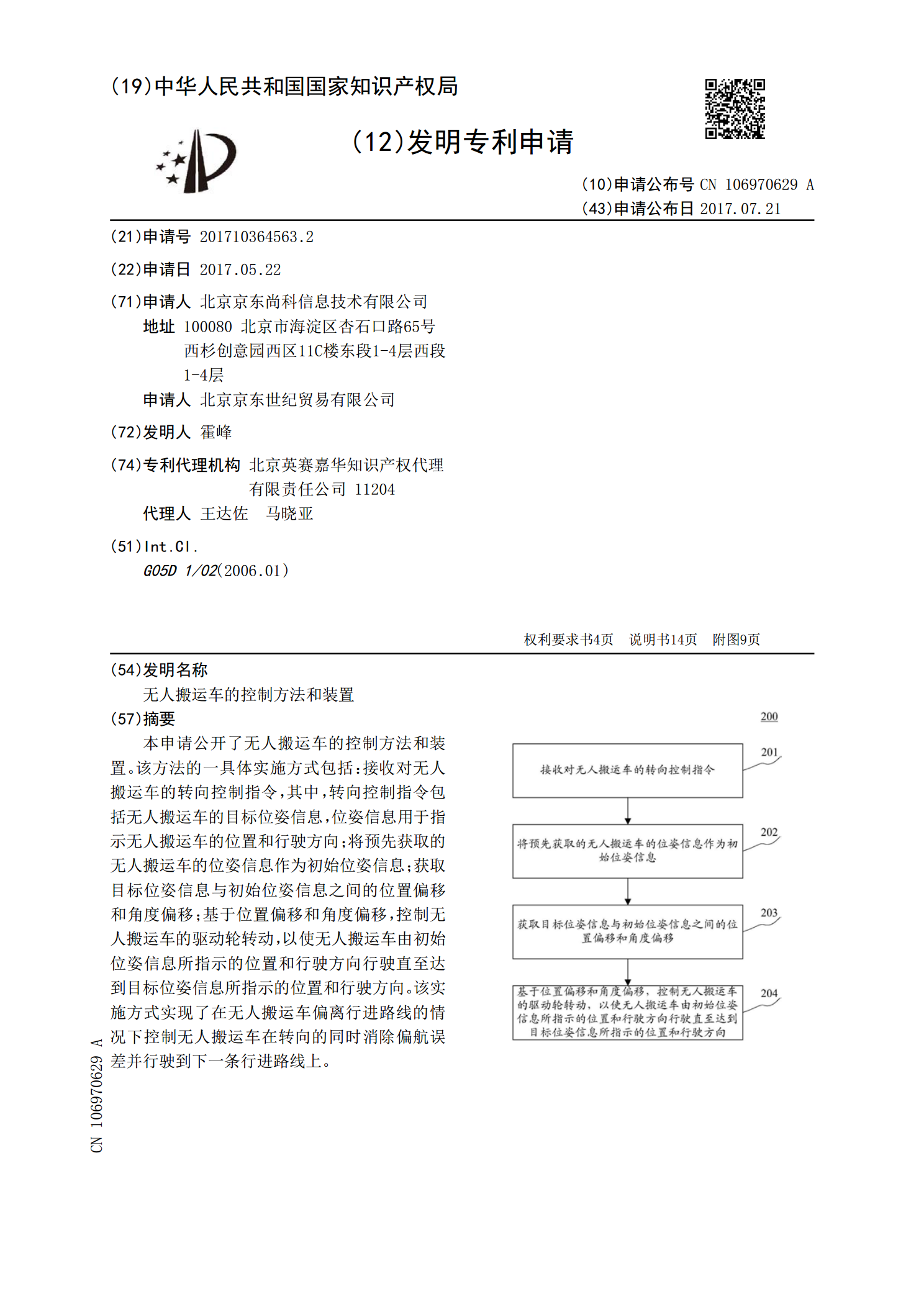
本申请公开了无人搬运车的控制方法和装置。该方法的一具体实施方式包括:接收对无人搬运车的转向控制指令,其中,转向控制指令包括无人搬运车的目标位姿信息,位姿信息用于指示无人搬运车的位置和行驶方向;将预先获取的无人搬运车的位姿信息作为初始位姿信息;获取目标位姿信息与初始位姿信息之间的位置偏移和角度偏移;基于位置偏移和角度偏移,控制无人搬运车的驱动轮转动,以使无人搬运车由初始位姿信息所指示的位置和行驶方向行驶直至达到目标位姿信息所指示的位置和行驶方向。该实施方式实现了在无人搬运车偏离行进路线的情况下控制无人搬运车
无人搬运车的控制方法和装置.pdf
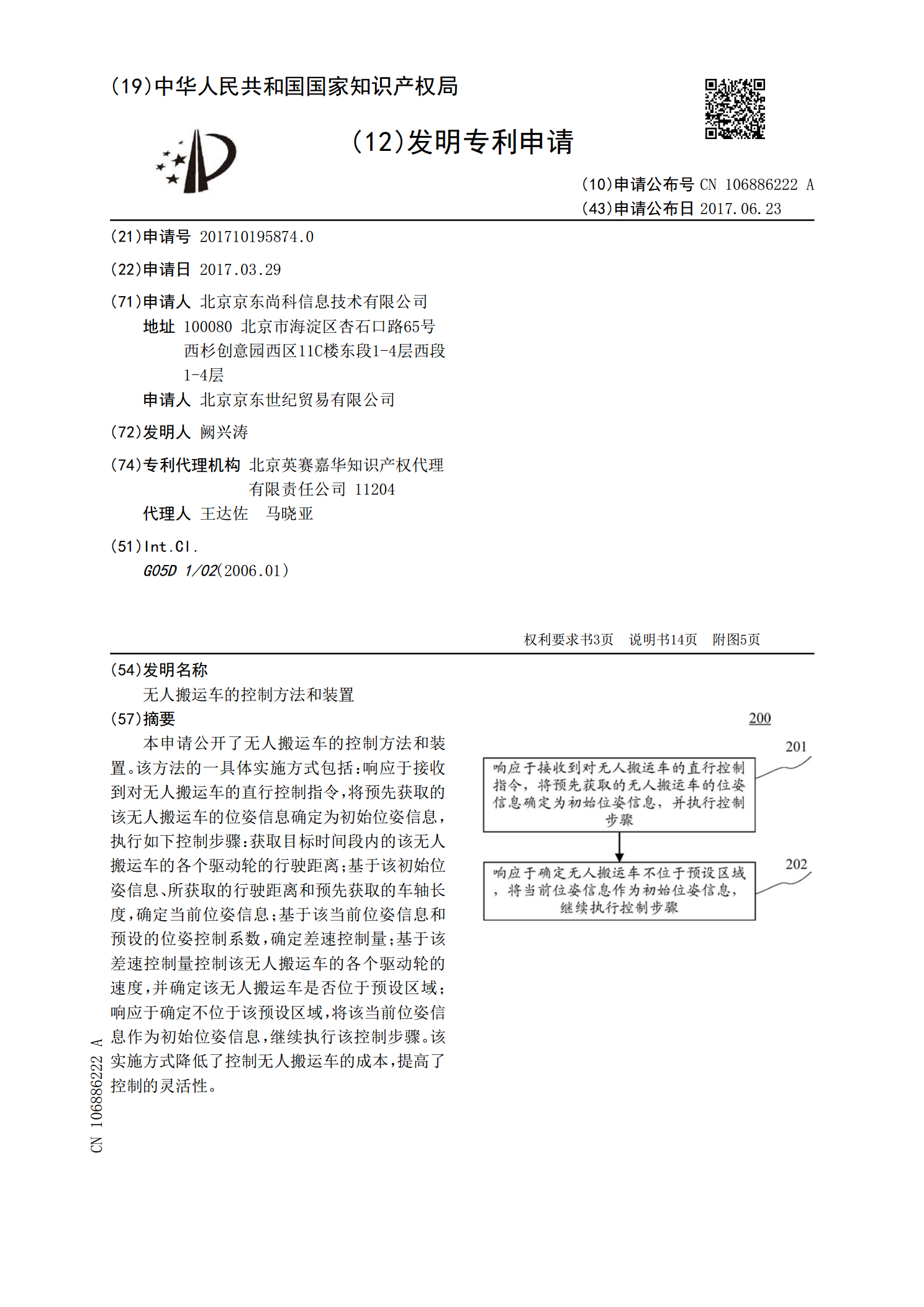
本申请公开了无人搬运车的控制方法和装置。该方法的一具体实施方式包括:响应于接收到对无人搬运车的直行控制指令,将预先获取的该无人搬运车的位姿信息确定为初始位姿信息,执行如下控制步骤:获取目标时间段内的该无人搬运车的各个驱动轮的行驶距离;基于该初始位姿信息、所获取的行驶距离和预先获取的车轴长度,确定当前位姿信息;基于该当前位姿信息和预设的位姿控制系数,确定差速控制量;基于该差速控制量控制该无人搬运车的各个驱动轮的速度,并确定该无人搬运车是否位于预设区域;响应于确定不位于该预设区域,将该当前位姿信息作为初始位姿
无人搬运车的控制方法和装置.pdf
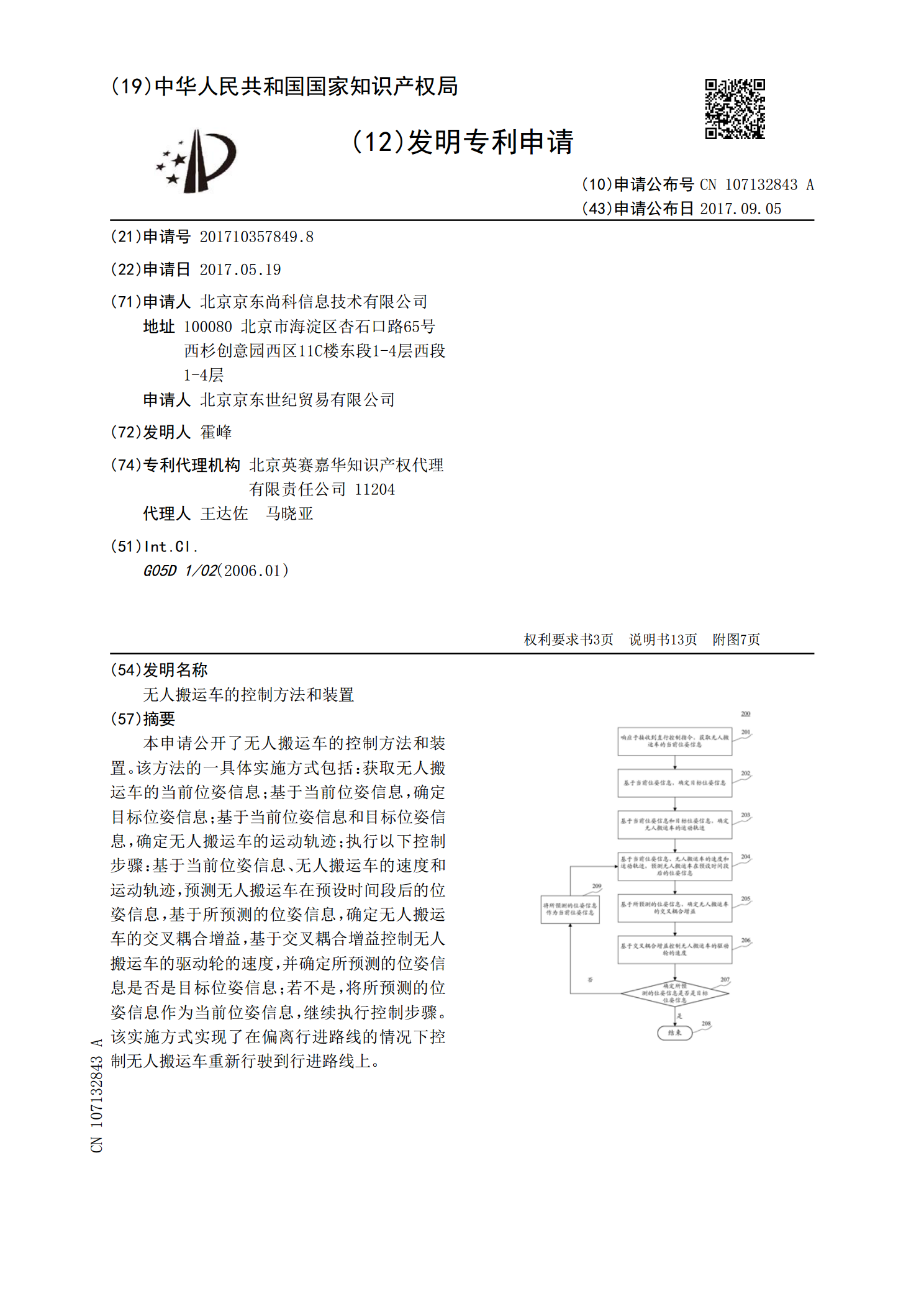
本申请公开了无人搬运车的控制方法和装置。该方法的一具体实施方式包括:获取无人搬运车的当前位姿信息;基于当前位姿信息,确定目标位姿信息;基于当前位姿信息和目标位姿信息,确定无人搬运车的运动轨迹;执行以下控制步骤:基于当前位姿信息、无人搬运车的速度和运动轨迹,预测无人搬运车在预设时间段后的位姿信息,基于所预测的位姿信息,确定无人搬运车的交叉耦合增益,基于交叉耦合增益控制无人搬运车的驱动轮的速度,并确定所预测的位姿信息是否是目标位姿信息;若不是,将所预测的位姿信息作为当前位姿信息,继续执行控制步骤。该实施方式实
无人搬运车以及无人搬运车的控制方法.pdf
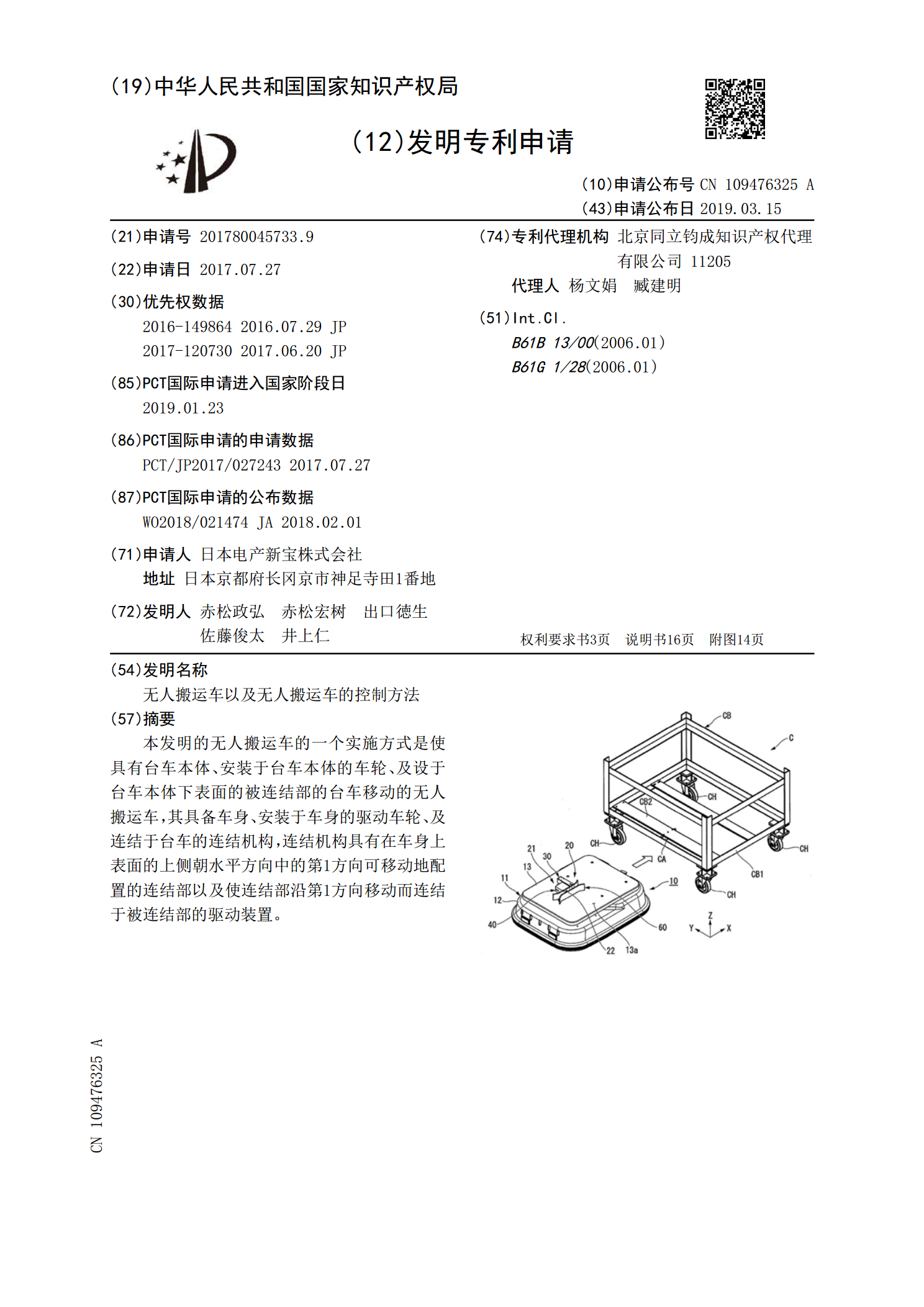
本发明的无人搬运车的一个实施方式是使具有台车本体、安装于台车本体的车轮、及设于台车本体下表面的被连结部的台车移动的无人搬运车,其具备车身、安装于车身的驱动车轮、及连结于台车的连结机构,连结机构具有在车身上表面的上侧朝水平方向中的第1方向可移动地配置的连结部以及使连结部沿第1方向移动而连结于被连结部的驱动装置。
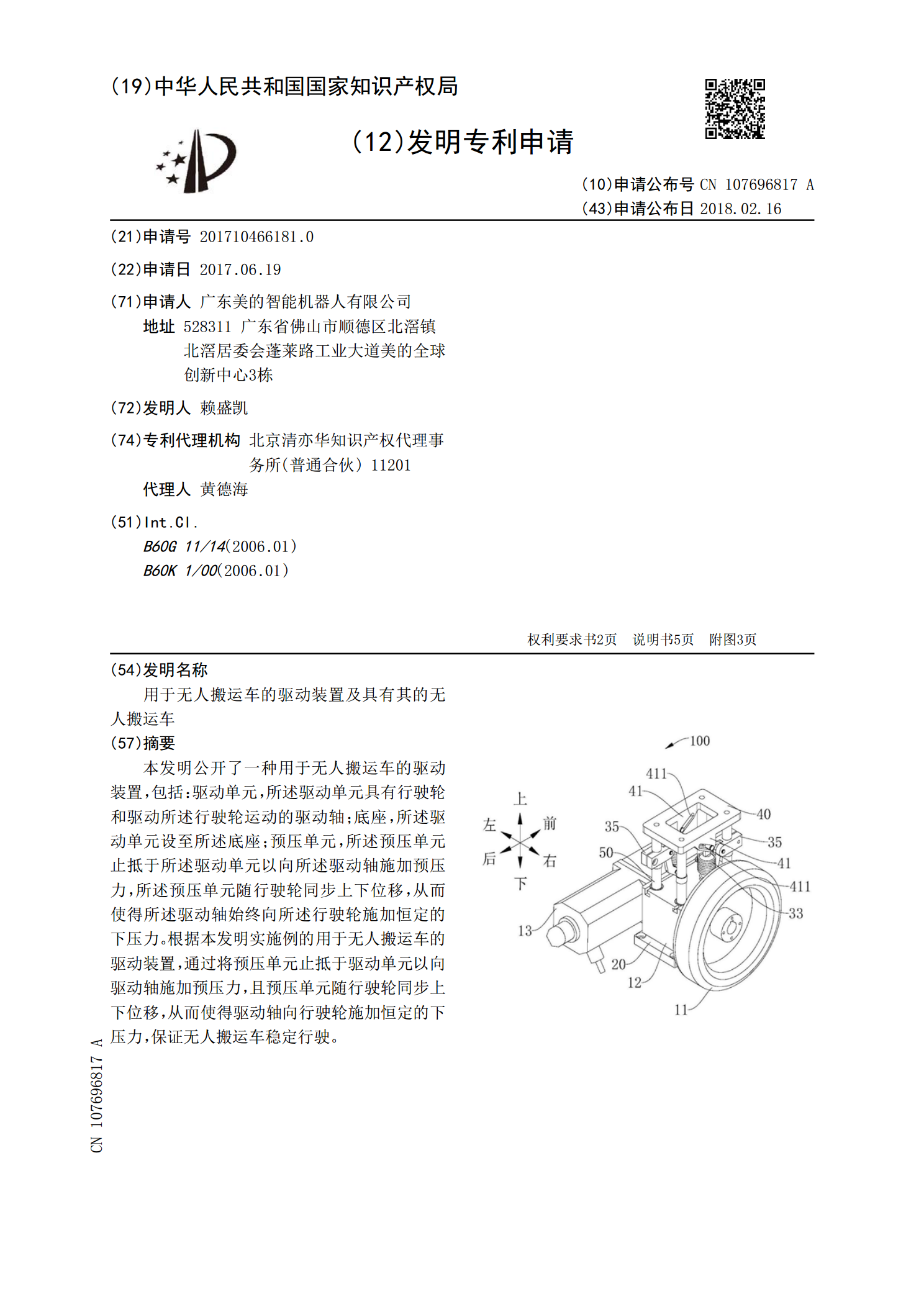
用于无人搬运车的驱动装置及具有其的无人搬运车.pdf
本发明公开了一种用于无人搬运车的驱动装置,包括:驱动单元,所述驱动单元具有行驶轮和驱动所述行驶轮运动的驱动轴;底座,所述驱动单元设至所述底座;预压单元,所述预压单元止抵于所述驱动单元以向所述驱动轴施加预压力,所述预压单元随行驶轮同步上下位移,从而使得所述驱动轴始终向所述行驶轮施加恒定的下压力。根据本发明实施例的用于无人搬运车的驱动装置,通过将预压单元止抵于驱动单元以向驱动轴施加预压力,且预压单元随行驶轮同步上下位移,从而使得驱动轴向行驶轮施加恒定的下压力,保证无人搬运车稳定行驶。