
一种机器视觉的网球自动捡球机器人.pdf

雨星****萌娃

1/10
2/10

3/10
4/10
5/10
6/10
7/10

8/10

9/10
10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种机器视觉的网球自动捡球机器人.pdf
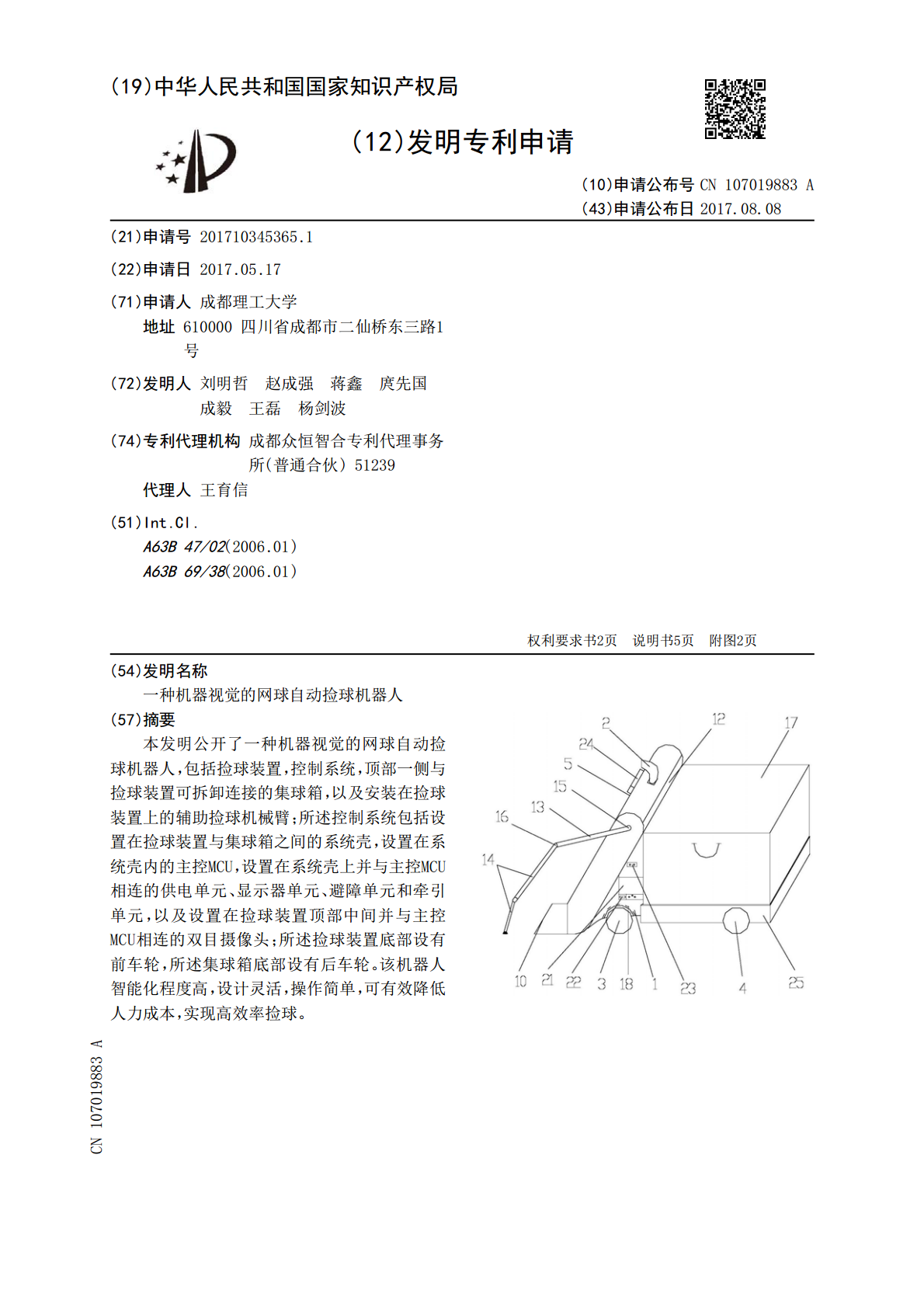
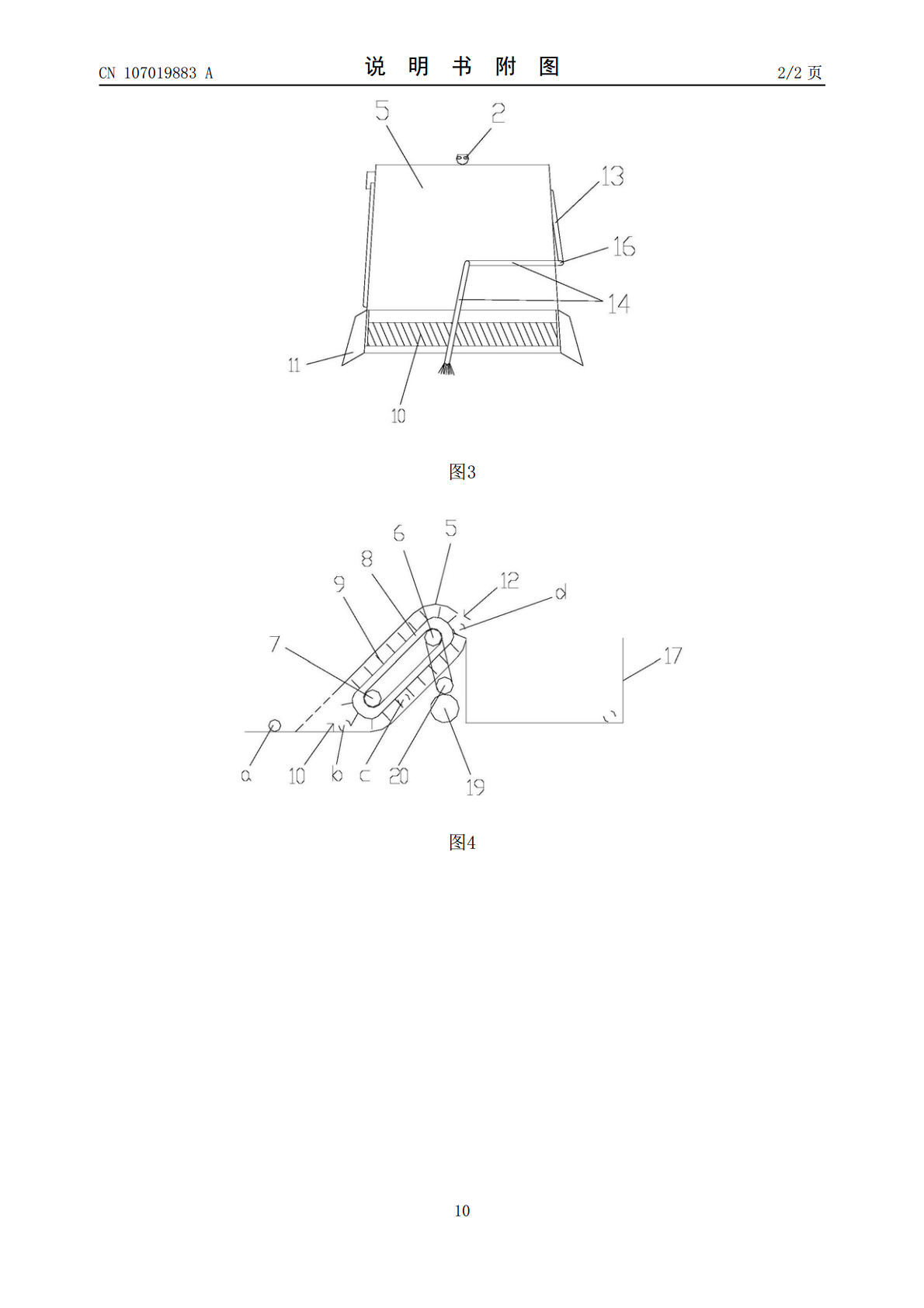
本发明公开了一种机器视觉的网球自动捡球机器人,包括捡球装置,控制系统,顶部一侧与捡球装置可拆卸连接的集球箱,以及安装在捡球装置上的辅助捡球机械臂;所述控制系统包括设置在捡球装置与集球箱之间的系统壳,设置在系统壳内的主控MCU,设置在系统壳上并与主控MCU相连的供电单元、显示器单元、避障单元和牵引单元,以及设置在捡球装置顶部中间并与主控MCU相连的双目摄像头;所述捡球装置底部设有前车轮,所述集球箱底部设有后车轮。该机器人智能化程度高,设计灵活,操作简单,可有效降低人力成本,实现高效率捡球。

一种半自动网球捡球机器人.pdf
本发明公开了一种半自动网球捡球机器人,包括外壳、滚轮和离子风机,所述过滤网设置在磁石圈的右侧,所述吸风机设置在过滤网的右侧,所述传送管开设有输球管和集尘盒,所述输球管设置在磁石圈的下方,集尘盒设置在过滤网的下方,所述输球管内壁安装有紫外线消毒灯和离子风机,所述紫外线消毒灯设置在离子风机的前端,所述输球管前端设置有蓄电池,所述外壳上端固定焊接有竖杆,所述竖杆上端安装有控制开关,所述外壳下端固定焊接有第一旋转电机,第一旋转电机下端安装有滚轮,所述滚轮连接有连接轴,所述连接轴转动连接有第二旋转电机。该半自动网球

一种全自动网球捡球机器.pdf
本发明公开一种全自动网球捡球机器,包括:主体机构、输送机构,所述的主体机构包括主体架,主体架的下面安装有轮子,通过轮子驱动电机带动轮子转动从而带动机器移动进而使收集杆收集网球到输送机构的前方,然后通过输送带驱动电机带动皮带转动轮转动从而带动输送带转动使挡球板转动将球通过球道运输到储存箱从而快速完成网球的收集,节省了人工捡球的时间和体力,更加方便了人们打网球,实现了自动化捡网球。

自动捡球机器人及捡球方法.pdf
本发明提供一种自动捡球机器人:包括机体外壳和机器人底盘,机体外壳盖设在机器人底盘顶部,机体外壳首端设置有开口,机器人底盘底部设置有驱动轮,机体外壳中设置有摄像头,摄像头伸出机体外壳的首端开口,机体外壳内腔中设置有捡球机构和装筒机构,捡球机构包括收集叶轮、收集滑道以及传送装置;本发明还提供一种自动捡球机器人的收集羽毛球的方法;本发明提供的自动捡球机器人,对摄像头获取的图像进行识别与分析,并通过判断图像内是否有球及球的位置来控制机器人的转向和行走;提高了捡球机器人的工作效率。
高尔夫捡球机器人及基于视觉开发的高尔夫捡球机器人.pdf
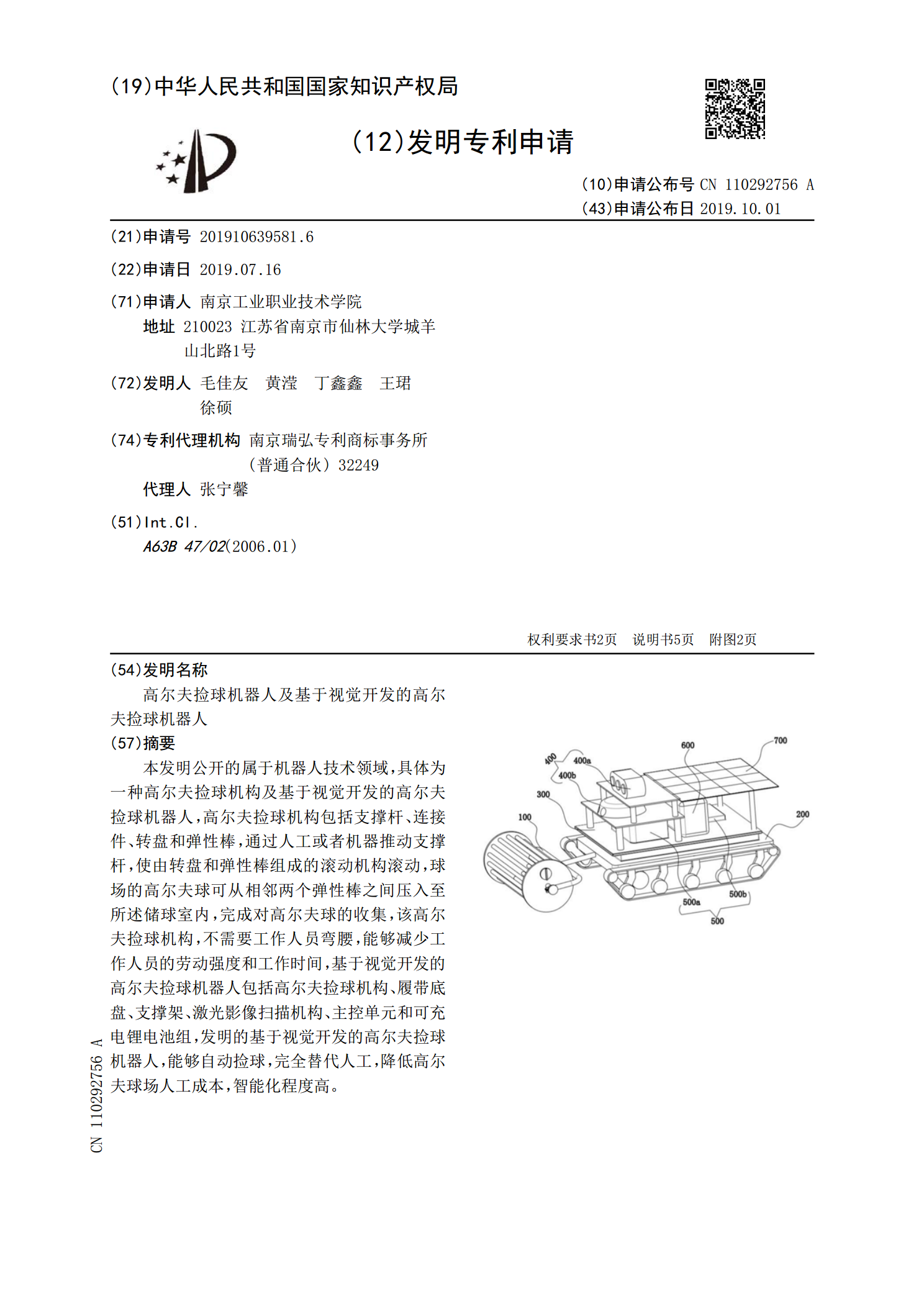
本发明公开的属于机器人技术领域,具体为一种高尔夫捡球机构及基于视觉开发的高尔夫捡球机器人,高尔夫捡球机构包括支撑杆、连接件、转盘和弹性棒,通过人工或者机器推动支撑杆,使由转盘和弹性棒组成的滚动机构滚动,球场的高尔夫球可从相邻两个弹性棒之间压入至所述储球室内,完成对高尔夫球的收集,该高尔夫捡球机构,不需要工作人员弯腰,能够减少工作人员的劳动强度和工作时间,基于视觉开发的高尔夫捡球机器人包括高尔夫捡球机构、履带底盘、支撑架、激光影像扫描机构、主控单元和可充电锂电池组,发明的基于视觉开发的高尔夫捡球机器人,能够