
自动捡球机器人及捡球方法.pdf

靖烟****魔王


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共19页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

自动捡球机器人及捡球方法.pdf
本发明提供一种自动捡球机器人:包括机体外壳和机器人底盘,机体外壳盖设在机器人底盘顶部,机体外壳首端设置有开口,机器人底盘底部设置有驱动轮,机体外壳中设置有摄像头,摄像头伸出机体外壳的首端开口,机体外壳内腔中设置有捡球机构和装筒机构,捡球机构包括收集叶轮、收集滑道以及传送装置;本发明还提供一种自动捡球机器人的收集羽毛球的方法;本发明提供的自动捡球机器人,对摄像头获取的图像进行识别与分析,并通过判断图像内是否有球及球的位置来控制机器人的转向和行走;提高了捡球机器人的工作效率。
高尔夫捡球机器人及基于视觉开发的高尔夫捡球机器人.pdf
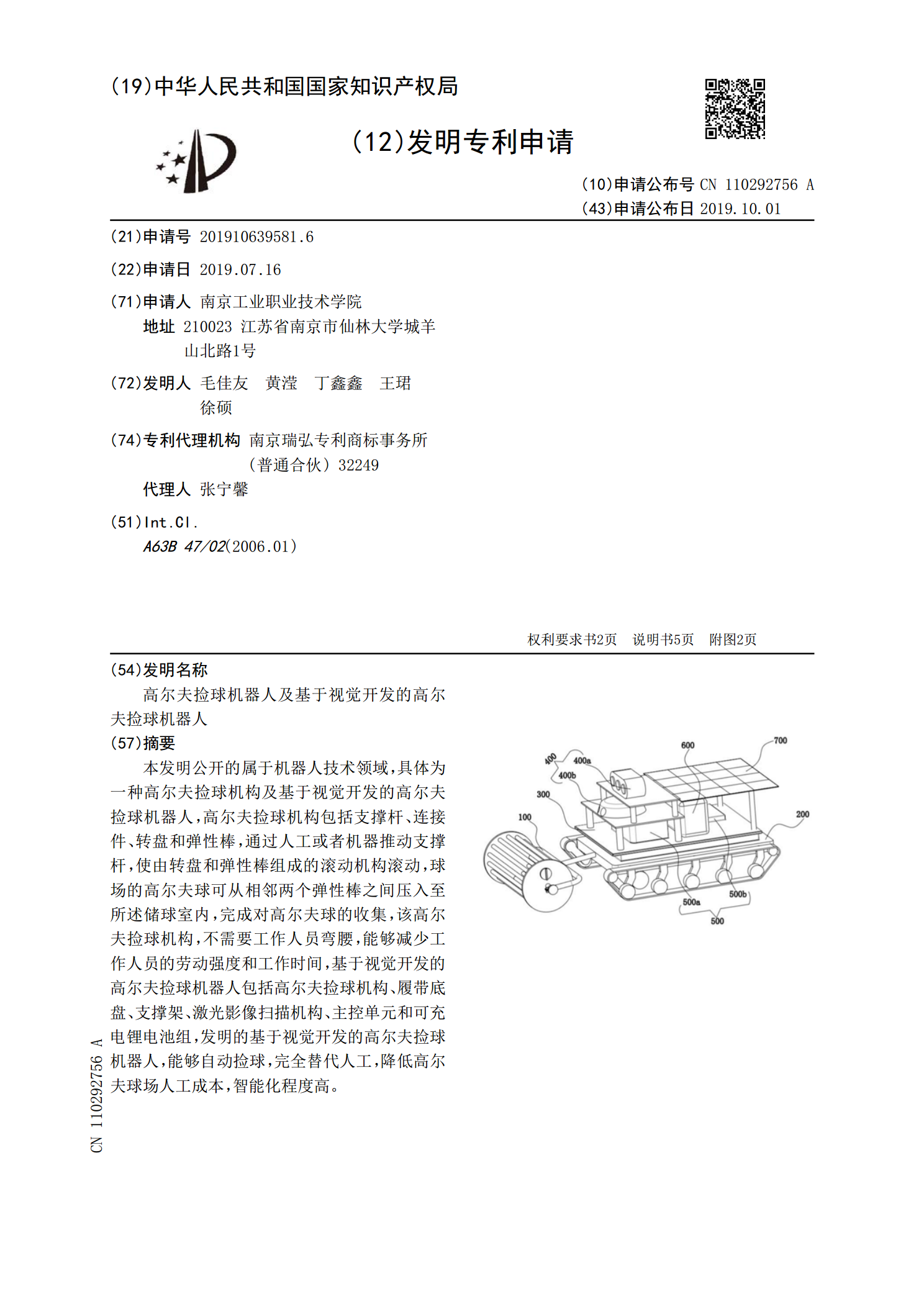
本发明公开的属于机器人技术领域,具体为一种高尔夫捡球机构及基于视觉开发的高尔夫捡球机器人,高尔夫捡球机构包括支撑杆、连接件、转盘和弹性棒,通过人工或者机器推动支撑杆,使由转盘和弹性棒组成的滚动机构滚动,球场的高尔夫球可从相邻两个弹性棒之间压入至所述储球室内,完成对高尔夫球的收集,该高尔夫捡球机构,不需要工作人员弯腰,能够减少工作人员的劳动强度和工作时间,基于视觉开发的高尔夫捡球机器人包括高尔夫捡球机构、履带底盘、支撑架、激光影像扫描机构、主控单元和可充电锂电池组,发明的基于视觉开发的高尔夫捡球机器人,能够

智能捡球机器人.pdf
本发明涉及一种智能捡球机器人,红外线测距器(4)安装在双摄像头(1)的上方,双摄像头(1)安装于齿条控制箱(2)的上方,齿条控制箱(2)安装在承装箱(10)上表面的中间位置,带齿条的耙子(3)插入齿条控制箱(2)中,铲子(5)安装在承装箱(10)的前部,右前轮(6)右后轮(7)和左后轮(8)左前轮(9)分别安装在承装箱(10)的左右两侧,机器人装有电机带动轮子可实现机器人自主运动,双摄像头(1)在机器人最上方可以对整个球场进行拍照摄像,发现球后,红外线测距器(4)测量出到球的最佳路线,机器人自主移动到目标

智能捡球机器人.pdf
本发明提供一种智能捡球机器人,红外线测距器(4)安装在双摄像头(1)的上方,双摄像头(1)安装于齿条控制箱(2)的上方,齿条控制箱(2)安装在承装箱(10)上表面的中间位置,带齿条的耙子(3)插入齿条控制箱(2)中,铲子(5)安装在承装箱(10)的前部,右前轮(6)右后轮(7)和左后轮(8)左前轮(9)分别安装在承装箱(10)的左右两侧,机器人装有电机带动轮子可实现机器人自主运动,双摄像头(1)在机器人最上方可以对整个球场进行拍照摄像,发现球后,红外线测距器(4)测量出到球的最佳路线,机器人自主移动到目标

一种半自动网球捡球机器人.pdf
本发明公开了一种半自动网球捡球机器人,包括外壳、滚轮和离子风机,所述过滤网设置在磁石圈的右侧,所述吸风机设置在过滤网的右侧,所述传送管开设有输球管和集尘盒,所述输球管设置在磁石圈的下方,集尘盒设置在过滤网的下方,所述输球管内壁安装有紫外线消毒灯和离子风机,所述紫外线消毒灯设置在离子风机的前端,所述输球管前端设置有蓄电池,所述外壳上端固定焊接有竖杆,所述竖杆上端安装有控制开关,所述外壳下端固定焊接有第一旋转电机,第一旋转电机下端安装有滚轮,所述滚轮连接有连接轴,所述连接轴转动连接有第二旋转电机。该半自动网球