
一种基于物联网的用于玻璃清洗的智能机器人.pdf

王秋****哥哥


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种基于物联网的用于玻璃清洗的智能机器人.pdf
本发明涉及一种基于物联网的用于玻璃清洗的智能机器人,包括主体、移动机构、伸缩杆、清洗机构和中控机构,移动机构包括壳体、驱动组件和两个移动组件,驱动组件包括第一电机、第一驱动轴、第一齿轮和驱动框,移动单元包括第二齿轮、固定杆和吸盘,清洗机构包括外壳、清洗刷、喷头、传动组件和控制组件,控制组件包括第二电机、第二驱动轴和第三齿轮,传动组件包括条形齿和传动杆。该基于物联网的用于玻璃清洗的智能机器人,通过移动机构中吸盘对玻璃的吸附,扩大了机器人在工作中的使用范围,也更加的牢靠,不会出现工作过程中突然滑落,过清洗机构
一种基于物联网的用于玻璃清洗的智能机械手.pdf
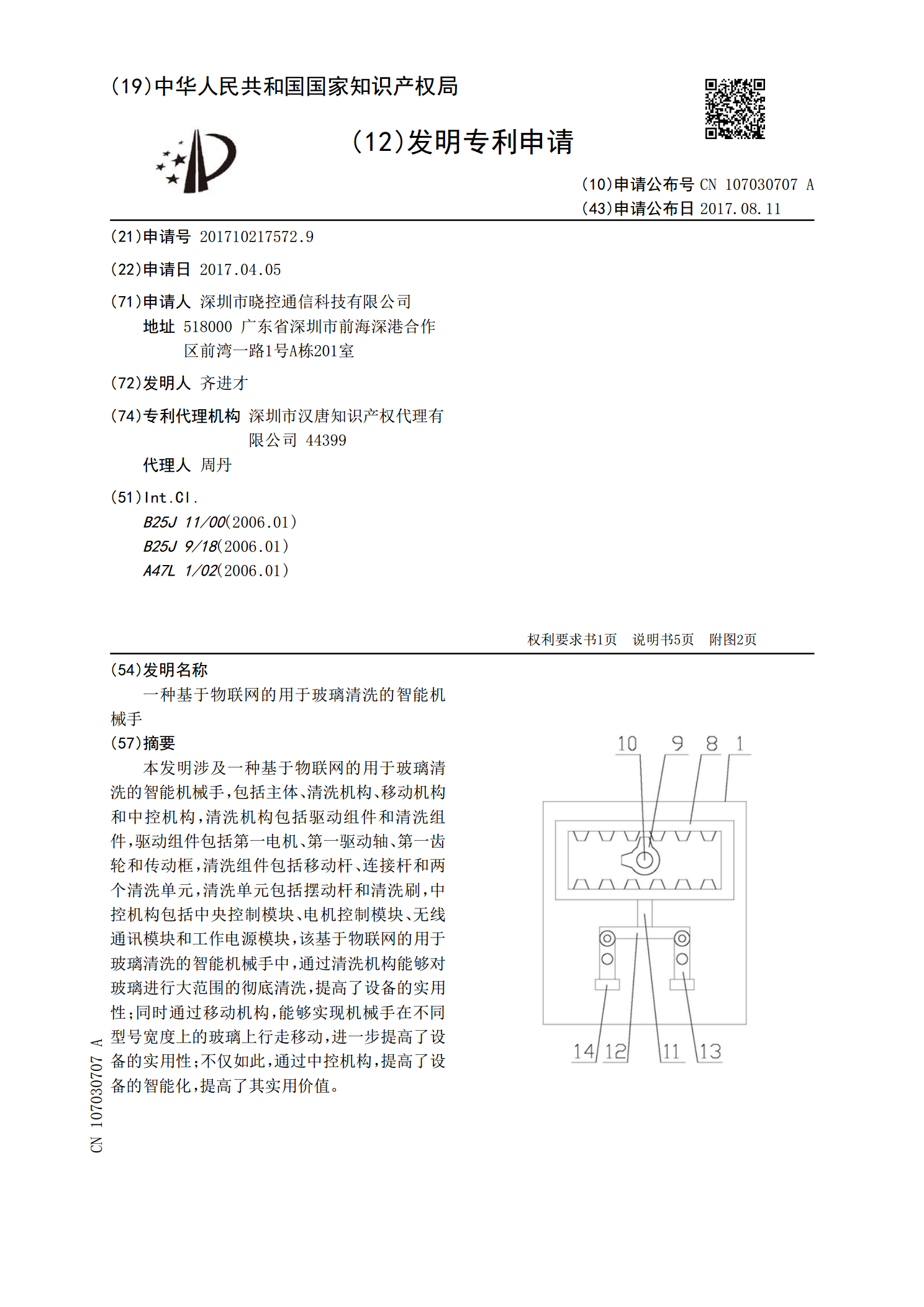
本发明涉及一种基于物联网的用于玻璃清洗的智能机械手,包括主体、清洗机构、移动机构和中控机构,清洗机构包括驱动组件和清洗组件,驱动组件包括第一电机、第一驱动轴、第一齿轮和传动框,清洗组件包括移动杆、连接杆和两个清洗单元,清洗单元包括摆动杆和清洗刷,中控机构包括中央控制模块、电机控制模块、无线通讯模块和工作电源模块,该基于物联网的用于玻璃清洗的智能机械手中,通过清洗机构能够对玻璃进行大范围的彻底清洗,提高了设备的实用性;同时通过移动机构,能够实现机械手在不同型号宽度上的玻璃上行走移动,进一步提高了设备的实用性
一种基于物联网的用于搬运的智能机器人.pdf
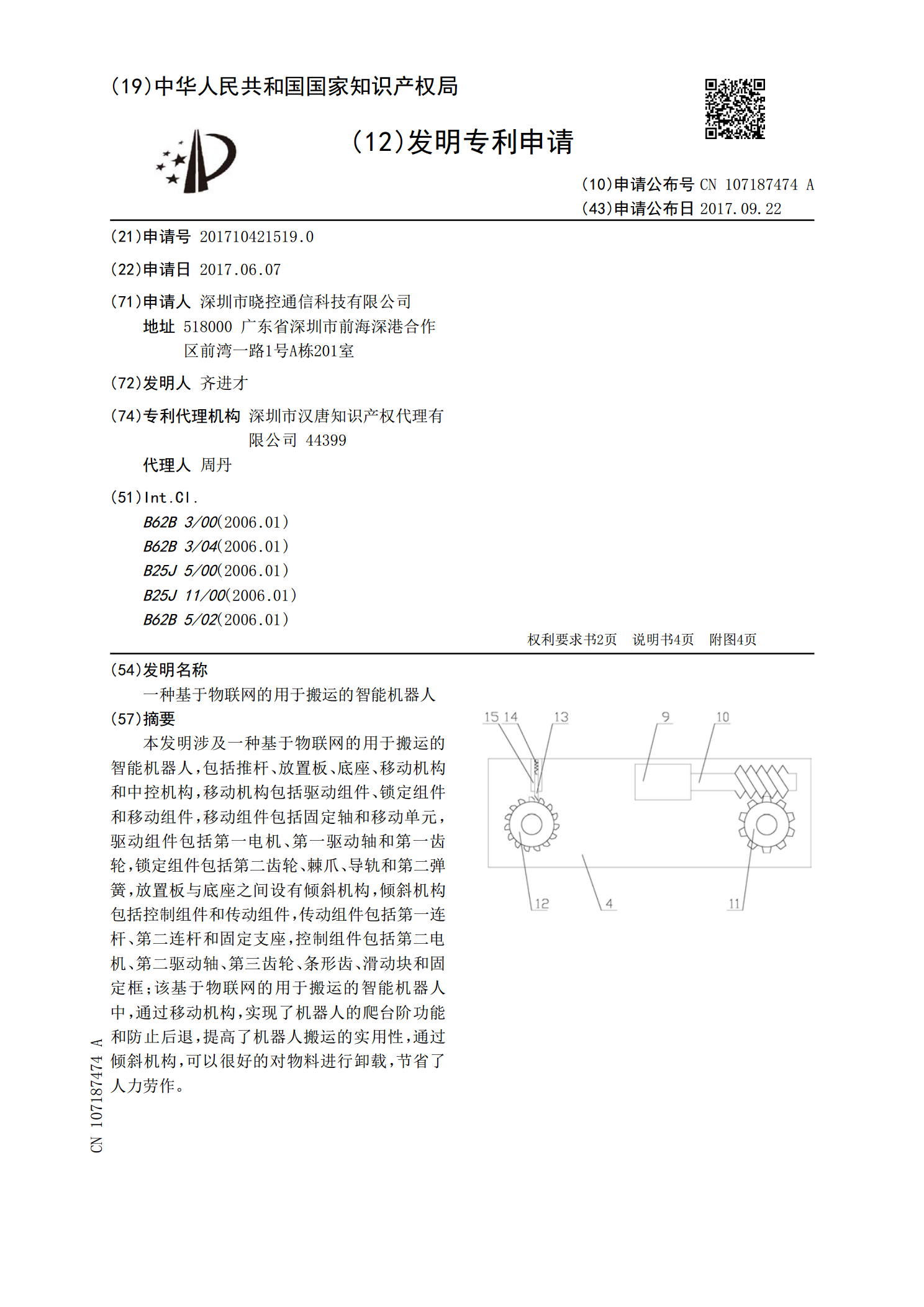
本发明涉及一种基于物联网的用于搬运的智能机器人,包括推杆、放置板、底座、移动机构和中控机构,移动机构包括驱动组件、锁定组件和移动组件,移动组件包括固定轴和移动单元,驱动组件包括第一电机、第一驱动轴和第一齿轮,锁定组件包括第二齿轮、棘爪、导轨和第二弹簧,放置板与底座之间设有倾斜机构,倾斜机构包括控制组件和传动组件,传动组件包括第一连杆、第二连杆和固定支座,控制组件包括第二电机、第二驱动轴、第三齿轮、条形齿、滑动块和固定框;该基于物联网的用于搬运的智能机器人中,通过移动机构,实现了机器人的爬台阶功能和防止后退
一种基于物联网的用于树木涂白的智能机器人.pdf
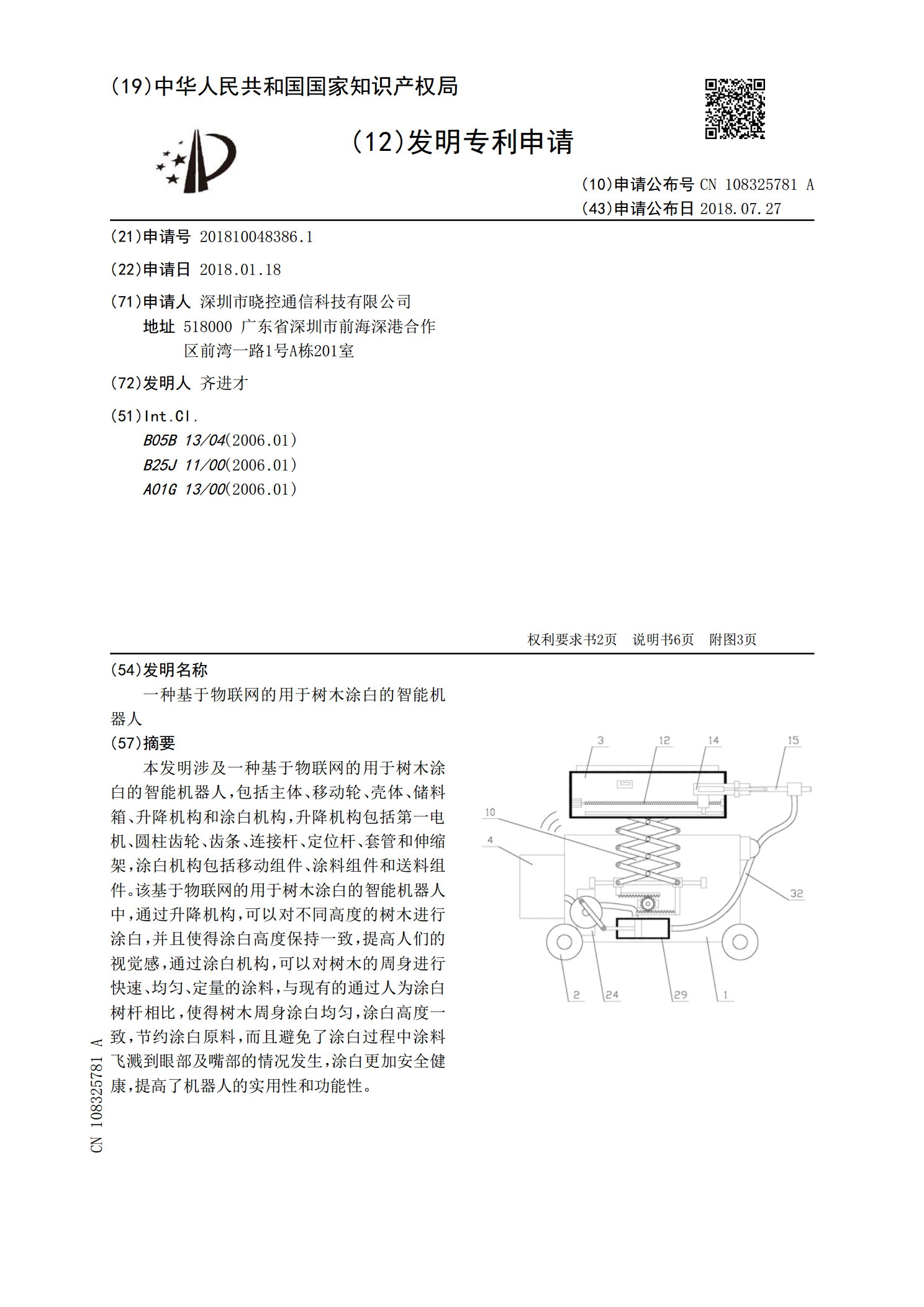
本发明涉及一种基于物联网的用于树木涂白的智能机器人,包括主体、移动轮、壳体、储料箱、升降机构和涂白机构,升降机构包括第一电机、圆柱齿轮、齿条、连接杆、定位杆、套管和伸缩架,涂白机构包括移动组件、涂料组件和送料组件。该基于物联网的用于树木涂白的智能机器人中,通过升降机构,可以对不同高度的树木进行涂白,并且使得涂白高度保持一致,提高人们的视觉感,通过涂白机构,可以对树木的周身进行快速、均匀、定量的涂料,与现有的通过人为涂白树杆相比,使得树木周身涂白均匀,涂白高度一致,节约涂白原料,而且避免了涂白过程中涂料飞溅

一种基于物联网的用于农业灌溉的智能机器人.pdf
本发明涉及一种基于物联网的用于农业灌溉的智能机器人,包括底座、探针、主体、蓄水箱、两个清洁机构和若干驱动机构,主体内设有升降机构,升降机构包括第三驱动电机、第一连杆、第二连杆、杠杆、第三连杆、插杆和支杆,清洁机构包括推进单元和清洁单元,清洁单元包括推板、连接杆、第五驱动电机、驱动轮、框架和清洁块,该基于物联网的用于农业灌溉的智能机器人通过升降机构带动探针在向下移动插入突然,对土壤湿度进行检测,以确定灌溉量,保证农作物健康成长,不仅如此,通过清洁机构使清洁块贴近探针并使清洁块来回移动清洁探针表面,使探针恢复