
一种基于物联网的用于搬运的智能机器人.pdf

映雁****魔王

1/10

2/10
3/10
4/10

5/10
6/10
7/10
8/10

9/10
10/10
亲,该文档总共11页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种基于物联网的用于搬运的智能机器人.pdf
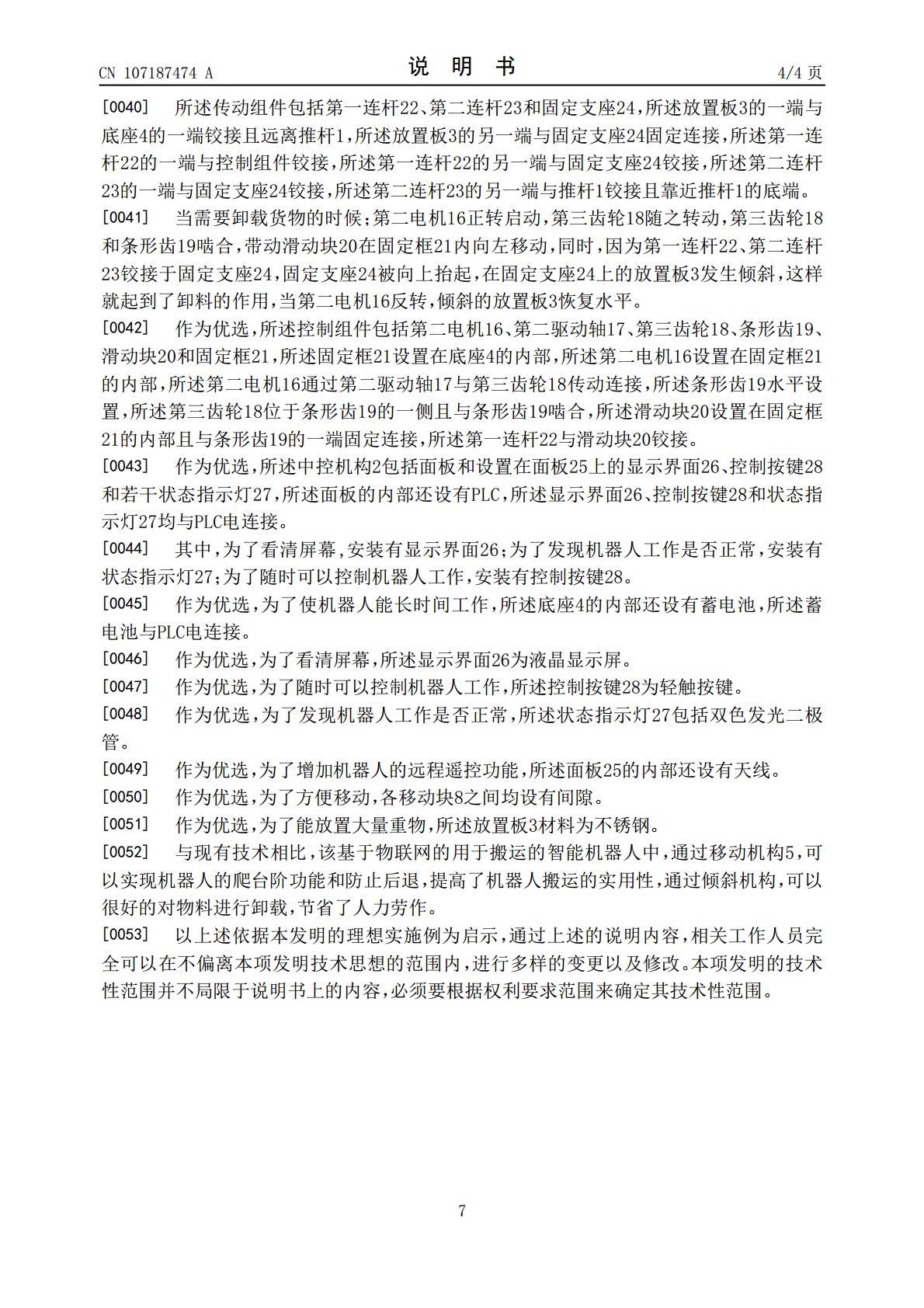
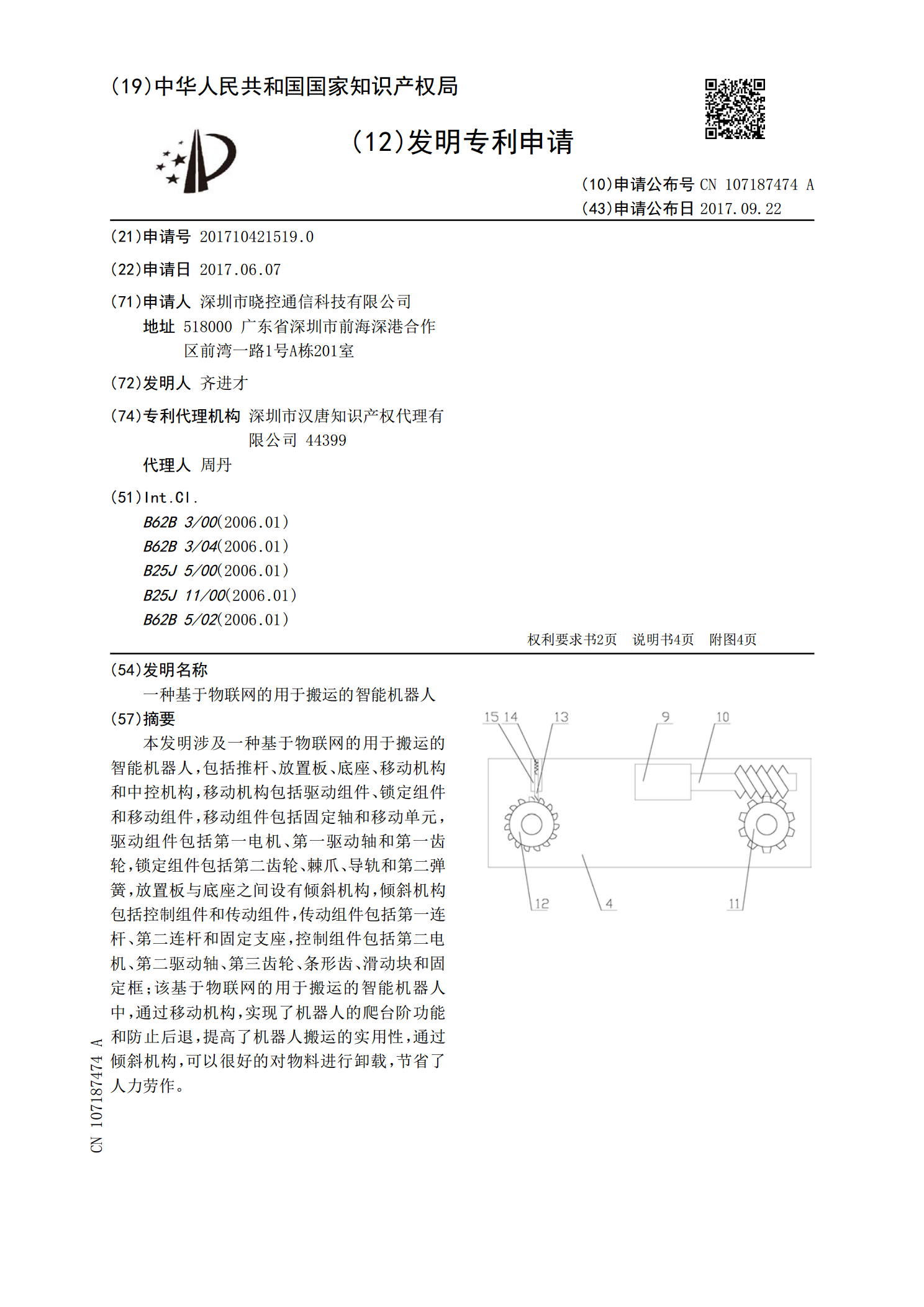
本发明涉及一种基于物联网的用于搬运的智能机器人,包括推杆、放置板、底座、移动机构和中控机构,移动机构包括驱动组件、锁定组件和移动组件,移动组件包括固定轴和移动单元,驱动组件包括第一电机、第一驱动轴和第一齿轮,锁定组件包括第二齿轮、棘爪、导轨和第二弹簧,放置板与底座之间设有倾斜机构,倾斜机构包括控制组件和传动组件,传动组件包括第一连杆、第二连杆和固定支座,控制组件包括第二电机、第二驱动轴、第三齿轮、条形齿、滑动块和固定框;该基于物联网的用于搬运的智能机器人中,通过移动机构,实现了机器人的爬台阶功能和防止后退
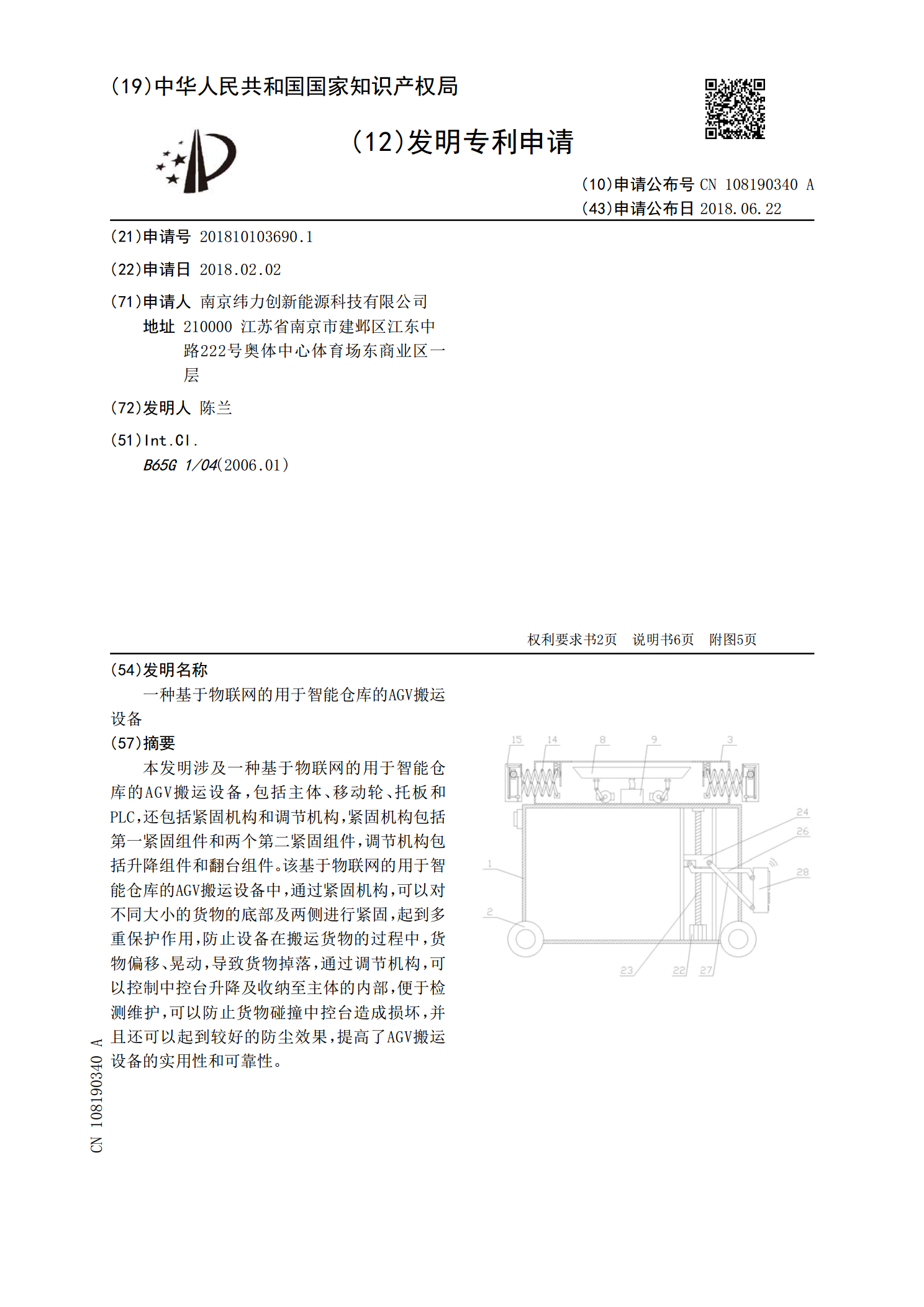
一种基于物联网的用于智能仓库的AGV搬运设备.pdf
本发明涉及一种基于物联网的用于智能仓库的AGV搬运设备,包括主体、移动轮、托板和PLC,还包括紧固机构和调节机构,紧固机构包括第一紧固组件和两个第二紧固组件,调节机构包括升降组件和翻台组件。该基于物联网的用于智能仓库的AGV搬运设备中,通过紧固机构,可以对不同大小的货物的底部及两侧进行紧固,起到多重保护作用,防止设备在搬运货物的过程中,货物偏移、晃动,导致货物掉落,通过调节机构,可以控制中控台升降及收纳至主体的内部,便于检测维护,可以防止货物碰撞中控台造成损坏,并且还可以起到较好的防尘效果,提高了AGV搬
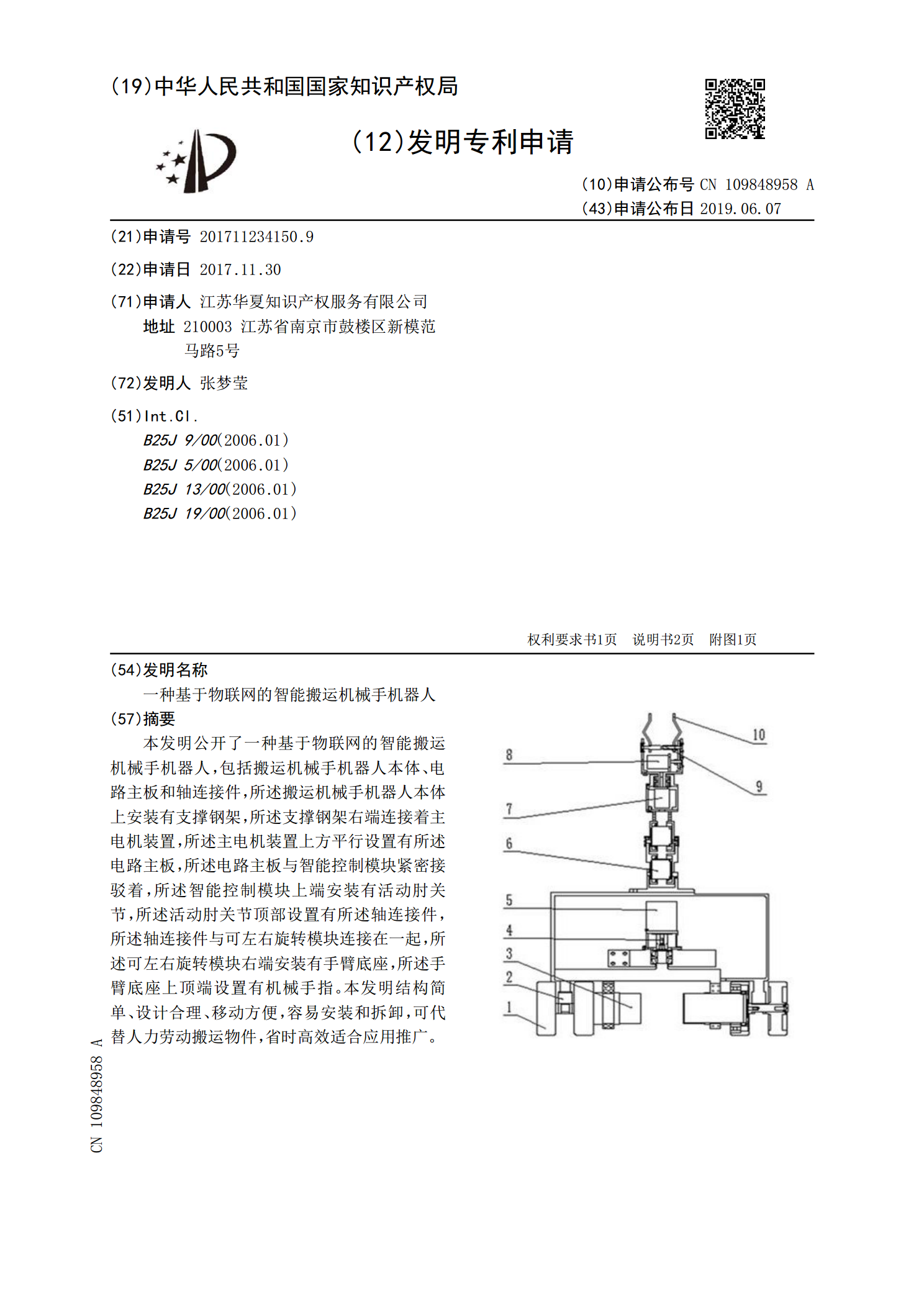
一种基于物联网的智能搬运机械手机器人.pdf
本发明公开了一种基于物联网的智能搬运机械手机器人,包括搬运机械手机器人本体、电路主板和轴连接件,所述搬运机械手机器人本体上安装有支撑钢架,所述支撑钢架右端连接着主电机装置,所述主电机装置上方平行设置有所述电路主板,所述电路主板与智能控制模块紧密接驳着,所述智能控制模块上端安装有活动肘关节,所述活动肘关节顶部设置有所述轴连接件,所述轴连接件与可左右旋转模块连接在一起,所述可左右旋转模块右端安装有手臂底座,所述手臂底座上顶端设置有机械手指。本发明结构简单、设计合理、移动方便,容易安装和拆卸,可代替人力劳动搬运
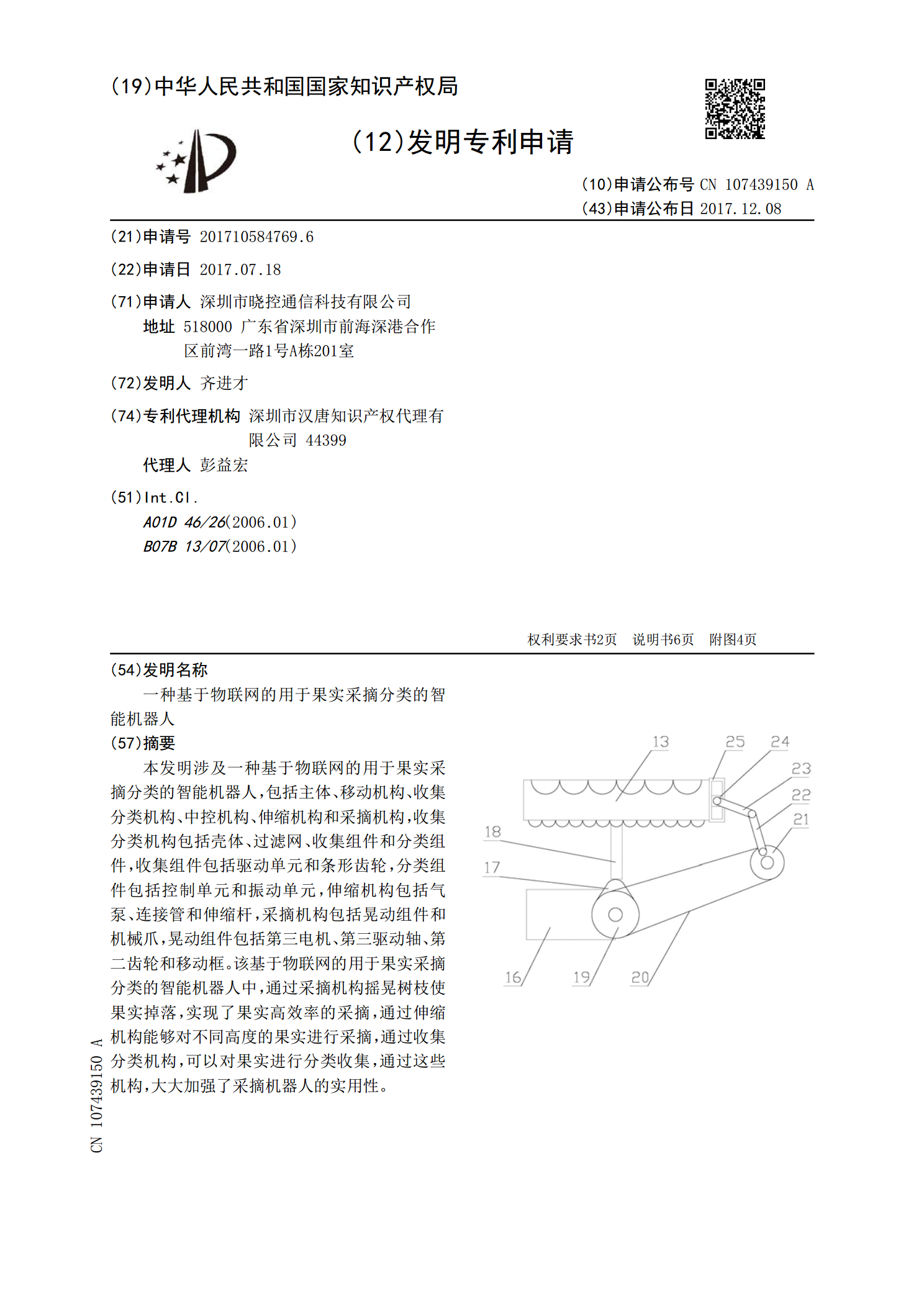
一种基于物联网的用于果实采摘分类的智能机器人.pdf
本发明涉及一种基于物联网的用于果实采摘分类的智能机器人,包括主体、移动机构、收集分类机构、中控机构、伸缩机构和采摘机构,收集分类机构包括壳体、过滤网、收集组件和分类组件,收集组件包括驱动单元和条形齿轮,分类组件包括控制单元和振动单元,伸缩机构包括气泵、连接管和伸缩杆,采摘机构包括晃动组件和机械爪,晃动组件包括第三电机、第三驱动轴、第二齿轮和移动框。该基于物联网的用于果实采摘分类的智能机器人中,通过采摘机构摇晃树枝使果实掉落,实现了果实高效率的采摘,通过伸缩机构能够对不同高度的果实进行采摘,通过收集分类机构

一种基于物联网的用于多功能浇水的智能机器人.pdf
本发明涉及一种基于物联网的用于多功能浇水的智能机器人,包括底座、第一电机、转轴、弯曲机构、两个机械臂机构、两个推拉机构和两个移动机构,第一电机设置在底座内,第一电机与转轴传动连接,弯曲机构设置在转轴的上方,两个推拉机构分别设置在转轴的两侧,推拉机构与机械臂机构传动连接,两个移动机构分别设置在底座下方的两侧,该基于物联网的用于多功能浇水的智能机器人,通过转动组件、驱动组件和从动组件来调节浇水角度,从而适应各种情况下的浇水需求,通过移动机构可以扩大浇水范围,提升了机动性,使该产品更加符合现在的市场需求。