
一种纯电动汽车驱动装置及驱动方法.pdf

羽沫****魔王

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共15页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种纯电动汽车驱动装置及驱动方法.pdf
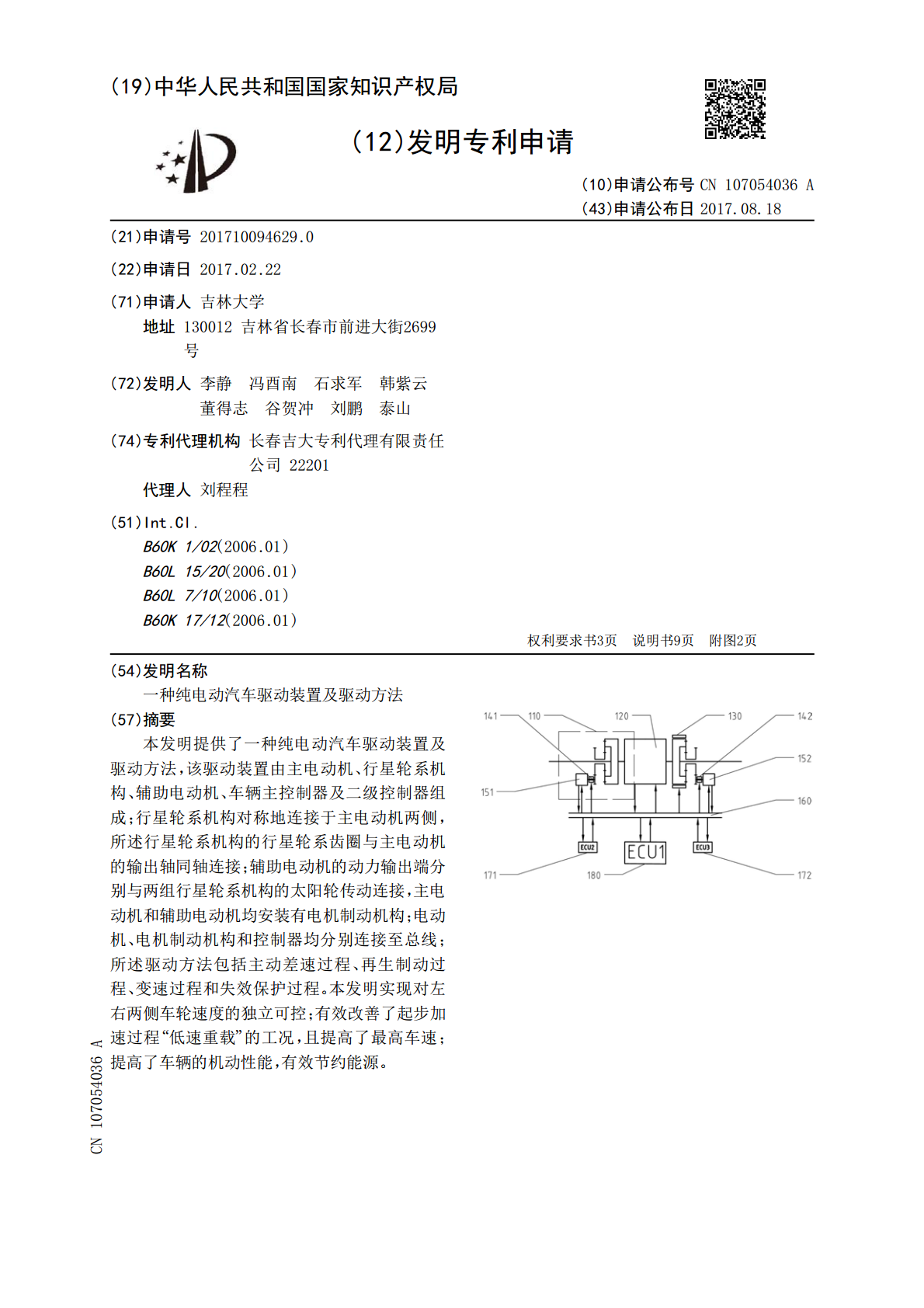
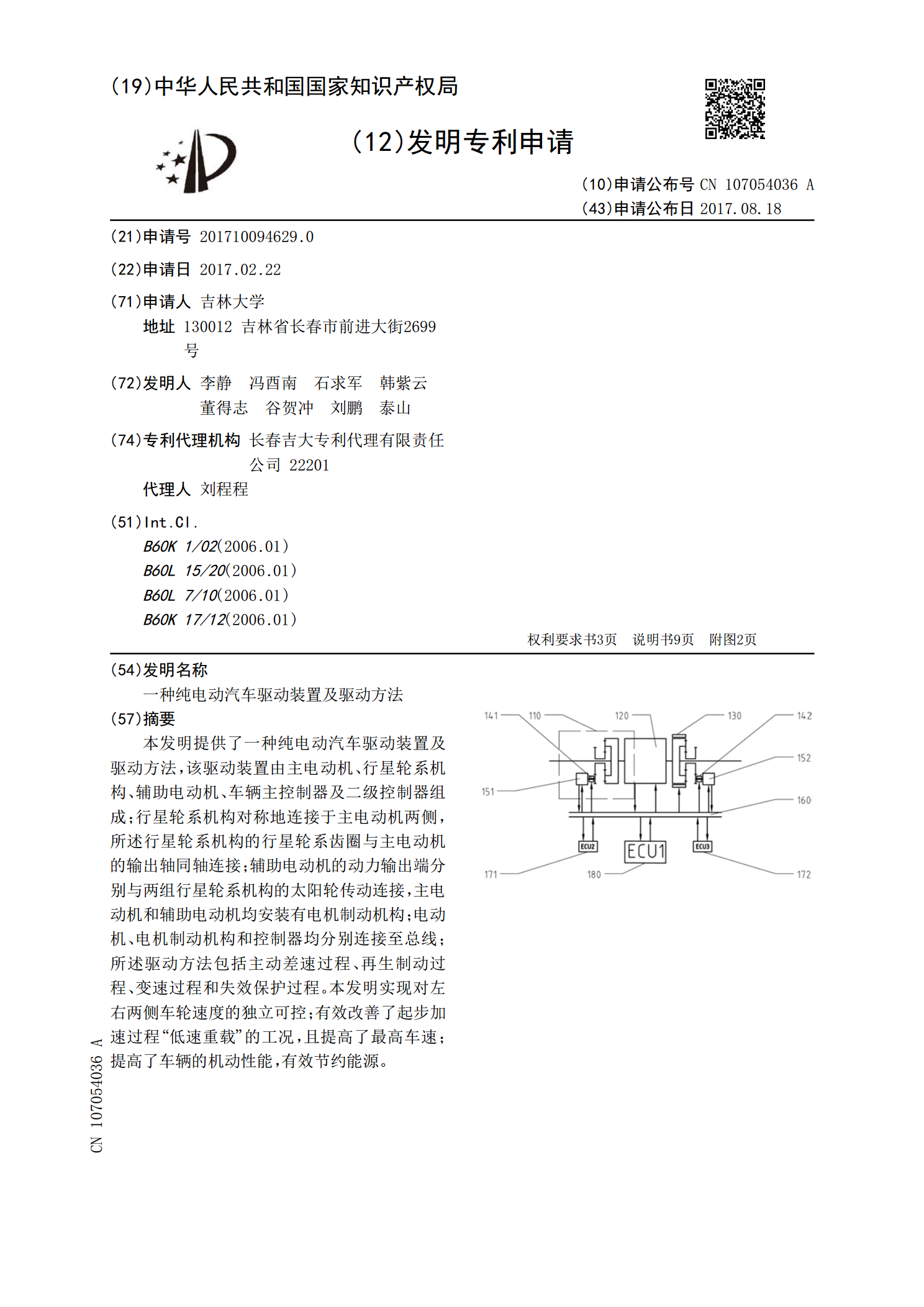
本发明提供了一种纯电动汽车驱动装置及驱动方法,该驱动装置由主电动机、行星轮系机构、辅助电动机、车辆主控制器及二级控制器组成;行星轮系机构对称地连接于主电动机两侧,所述行星轮系机构的行星轮系齿圈与主电动机的输出轴同轴连接;辅助电动机的动力输出端分别与两组行星轮系机构的太阳轮传动连接,主电动机和辅助电动机均安装有电机制动机构;电动机、电机制动机构和控制器均分别连接至总线;所述驱动方法包括主动差速过程、再生制动过程、变速过程和失效保护过程。本发明实现对左右两侧车轮速度的独立可控;有效改善了起步加速过程“低速重载

一种纯电动汽车用集成驱动装置.pdf
本发明公开了一种纯电动汽车用集成驱动装置,包括集成为一体化结构的左半轴、电动机、第一、第二行星排、差速器、右半轴;行星排均由行星排太阳轮、行星排行星轮、行星排齿圈和行星排行星架组成;电动机的转子轴为空心轴,左半轴位于电动机的空心转子轴内;电动机的转子轴同第一行星排太阳轮相连;第一行星排齿圈和第二行星排齿圈均为固定设置;第一行星排行星架与第二行星排太阳轮连接;第二行星排行星架与差速器的壳体连接;电动机的动力经第一行星排和第二行星排减速增扭后输送到差速器,再经左半轴和右半轴将动力传递到车辆的左右驱动车轮。本发
一种纯电动汽车及其轮边驱动装置.pdf
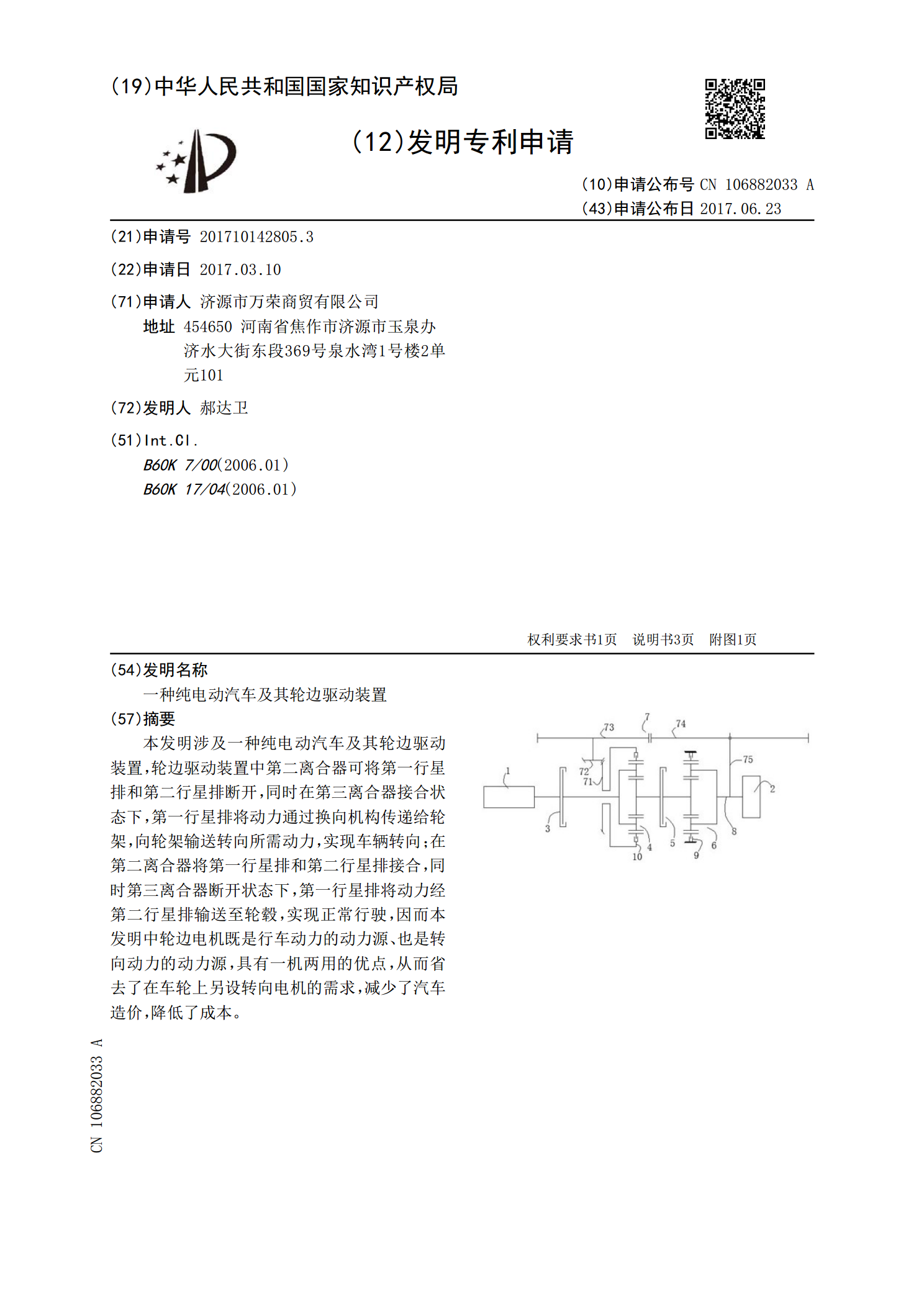
本发明涉及一种纯电动汽车及其轮边驱动装置,轮边驱动装置中第二离合器可将第一行星排和第二行星排断开,同时在第三离合器接合状态下,第一行星排将动力通过换向机构传递给轮架,向轮架输送转向所需动力,实现车辆转向;在第二离合器将第一行星排和第二行星排接合,同时第三离合器断开状态下,第一行星排将动力经第二行星排输送至轮毂,实现正常行驶,因而本发明中轮边电机既是行车动力的动力源、也是转向动力的动力源,具有一机两用的优点,从而省去了在车轮上另设转向电机的需求,减少了汽车造价,降低了成本。
一种纯电力驱动的电动汽车.pdf
本发明属于电动汽车技术领域,公开了一种纯电力驱动的电动汽车,包括电动汽车主体、固定安装在所述电动汽车主体下底面的安装框以及可拆卸安装在所述安装框内的电池组件;所述电池组件包括矩形的框体、安装在所述框体内的蓄电池以及两个安装在所述框体两侧的撑杆组件;所述框体的下端对应所述从动轮和所述主动轮组件处安装有插销组件;所述框体上端固定连接有用于封闭所述框体的盖体。本发明在电动汽车在电量不足时通过直接更换电池组件,而不需要长时间等待进行充电,节省了车主的等待时间。
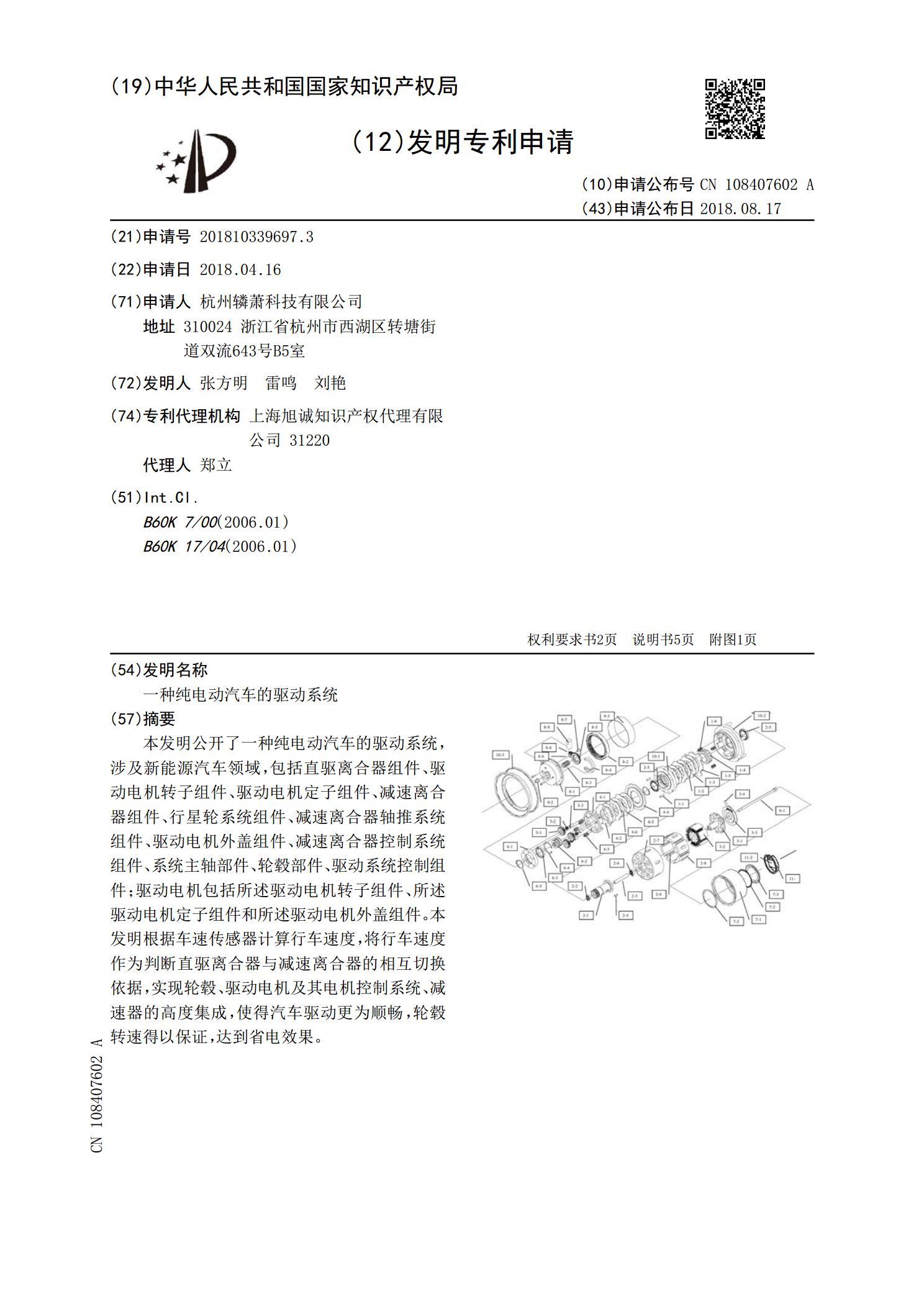
一种纯电动汽车的驱动系统.pdf
本发明公开了一种纯电动汽车的驱动系统,涉及新能源汽车领域,包括直驱离合器组件、驱动电机转子组件、驱动电机定子组件、减速离合器组件、行星轮系统组件、减速离合器轴推系统组件、驱动电机外盖组件、减速离合器控制系统组件、系统主轴部件、轮毂部件、驱动系统控制组件;驱动电机包括所述驱动电机转子组件、所述驱动电机定子组件和所述驱动电机外盖组件。本发明根据车速传感器计算行车速度,将行车速度作为判断直驱离合器与减速离合器的相互切换依据,实现轮毂、驱动电机及其电机控制系统、减速器的高度集成,使得汽车驱动更为顺畅,轮毂转速得以