
基于滑模补偿器技术的线控转向系统控制方法.pdf

邻家****ng

1/10
2/10
3/10
4/10

5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共16页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
基于滑模补偿器技术的线控转向系统控制方法.pdf
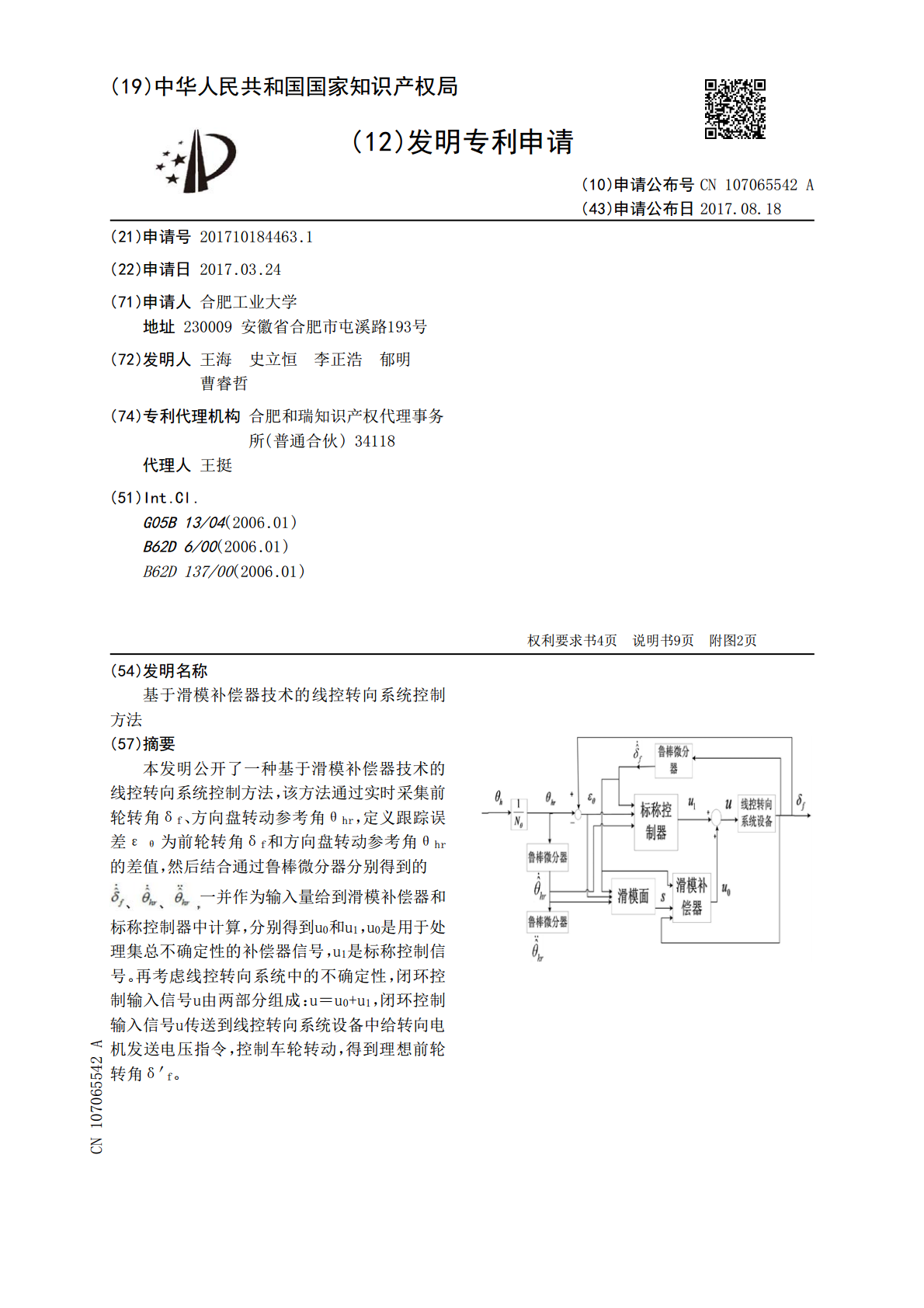
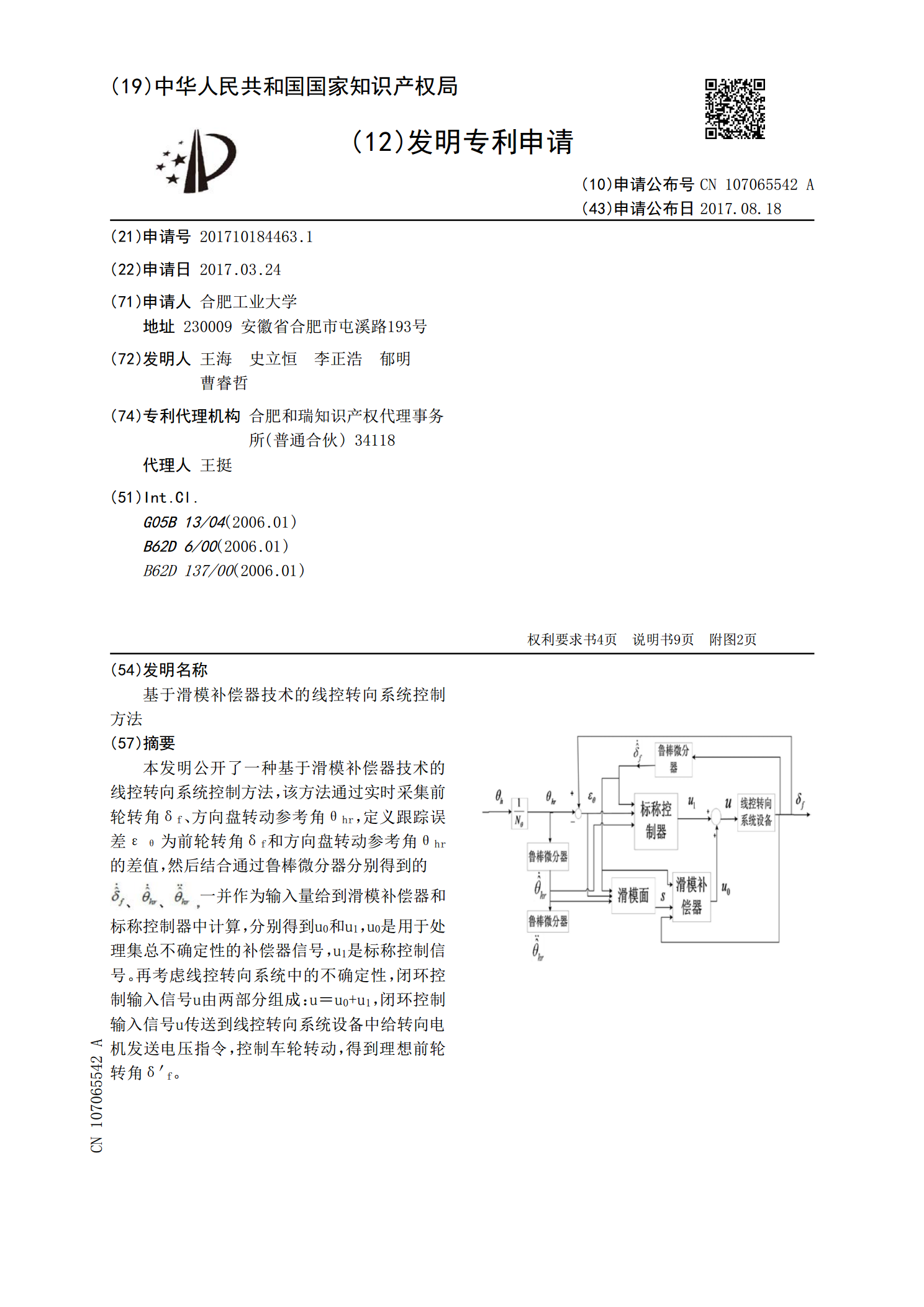
本发明公开了一种基于滑模补偿器技术的线控转向系统控制方法,该方法通过实时采集前轮转角δ

基于自适应终端滑模控制的汽车线控转向控制方法.pdf
本发明公开了一种基于自适应终端滑模控制的汽车线控转向系统控制方法,步骤包括实时采集前轮转角δ

基于线控技术的汽车电控转向路感控制方法.pdf
本发明公开了一种基于线控技术的汽车电控转向路感控制方法,步骤:1.系统初始化,如无故障则通过到步骤2;2.方向盘转角和前轮转角对中,即保证方向盘转角和转向前轮转角均在零点时,触发路感控制功能,并进入步骤3;3.采集和辨识转向系统以及车辆状态和参数的相关信号;4.对步骤3采集的信息进行处理,计算得到理想路感反馈目标转矩值;5.通过步骤4计算得到的目标转矩值,对路感模拟电机进行闭环控制,实现目标转矩值;6.根据路感模拟电机的运行状态,采用补偿控制方法对路感电机转矩值进行补偿控制,重复步骤3到步骤6的工作,直到
基于线控转向系统的车辆转向模式控制方法和装置.pdf
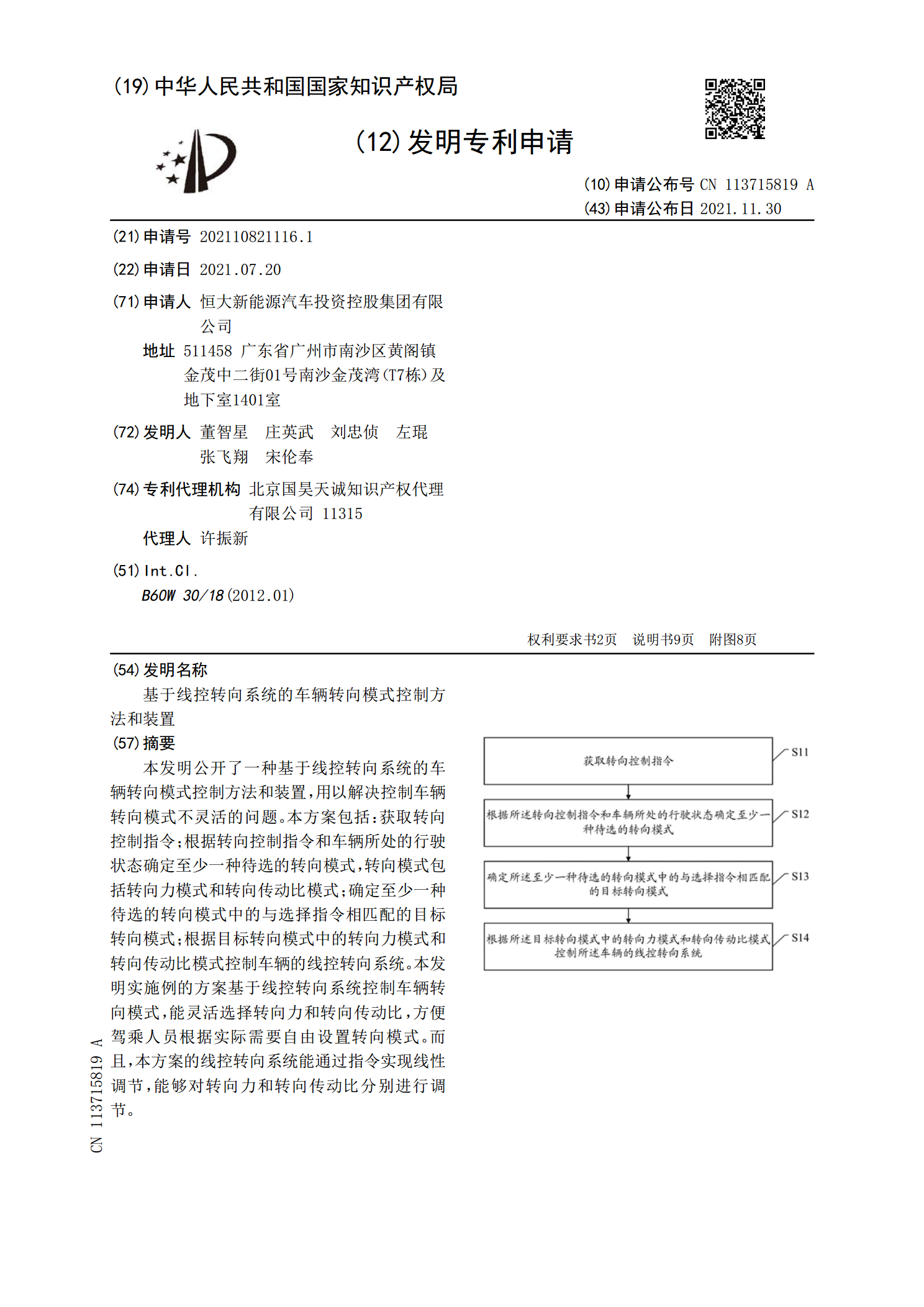
本发明公开了一种基于线控转向系统的车辆转向模式控制方法和装置,用以解决控制车辆转向模式不灵活的问题。本方案包括:获取转向控制指令;根据转向控制指令和车辆所处的行驶状态确定至少一种待选的转向模式,转向模式包括转向力模式和转向传动比模式;确定至少一种待选的转向模式中的与选择指令相匹配的目标转向模式;根据目标转向模式中的转向力模式和转向传动比模式控制车辆的线控转向系统。本发明实施例的方案基于线控转向系统控制车辆转向模式,能灵活选择转向力和转向传动比,方便驾乘人员根据实际需要自由设置转向模式。而且,本方案的线控转
线控转向系统和线控转向系统的控制方法.pdf
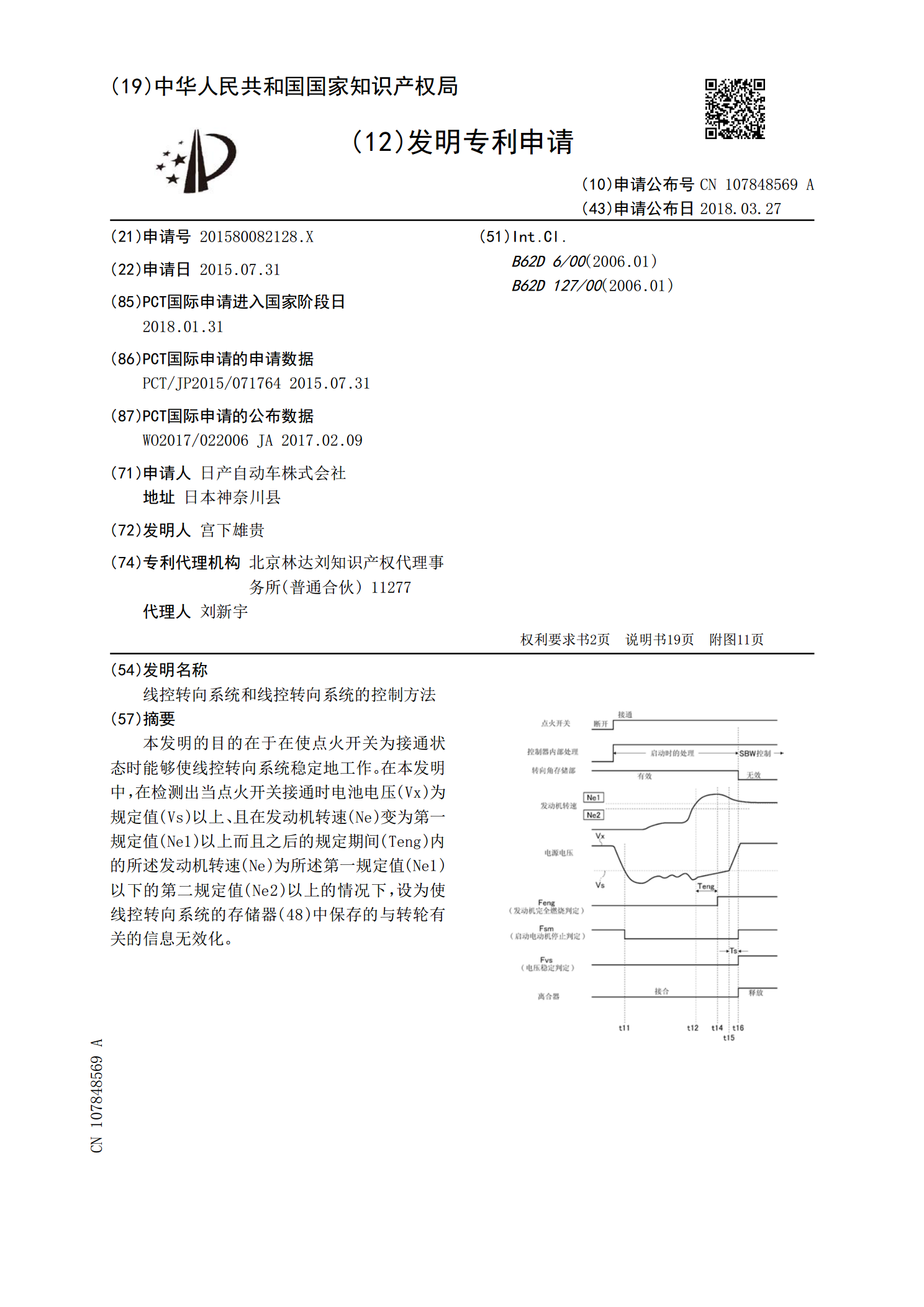
本发明的目的在于在使点火开关为接通状态时能够使线控转向系统稳定地工作。在本发明中,在检测出当点火开关接通时电池电压(Vx)为规定值(Vs)以上、且在发动机转速(Ne)变为第一规定值(Ne1)以上而且之后的规定期间(Teng)内的所述发动机转速(Ne)为所述第一规定值(Ne1)以下的第二规定值(Ne2)以上的情况下,设为使线控转向系统的存储器(48)中保存的与转轮有关的信息无效化。