
基于自适应终端滑模控制的汽车线控转向控制方法.pdf

靖烟****魔王

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共16页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

基于自适应终端滑模控制的汽车线控转向控制方法.pdf
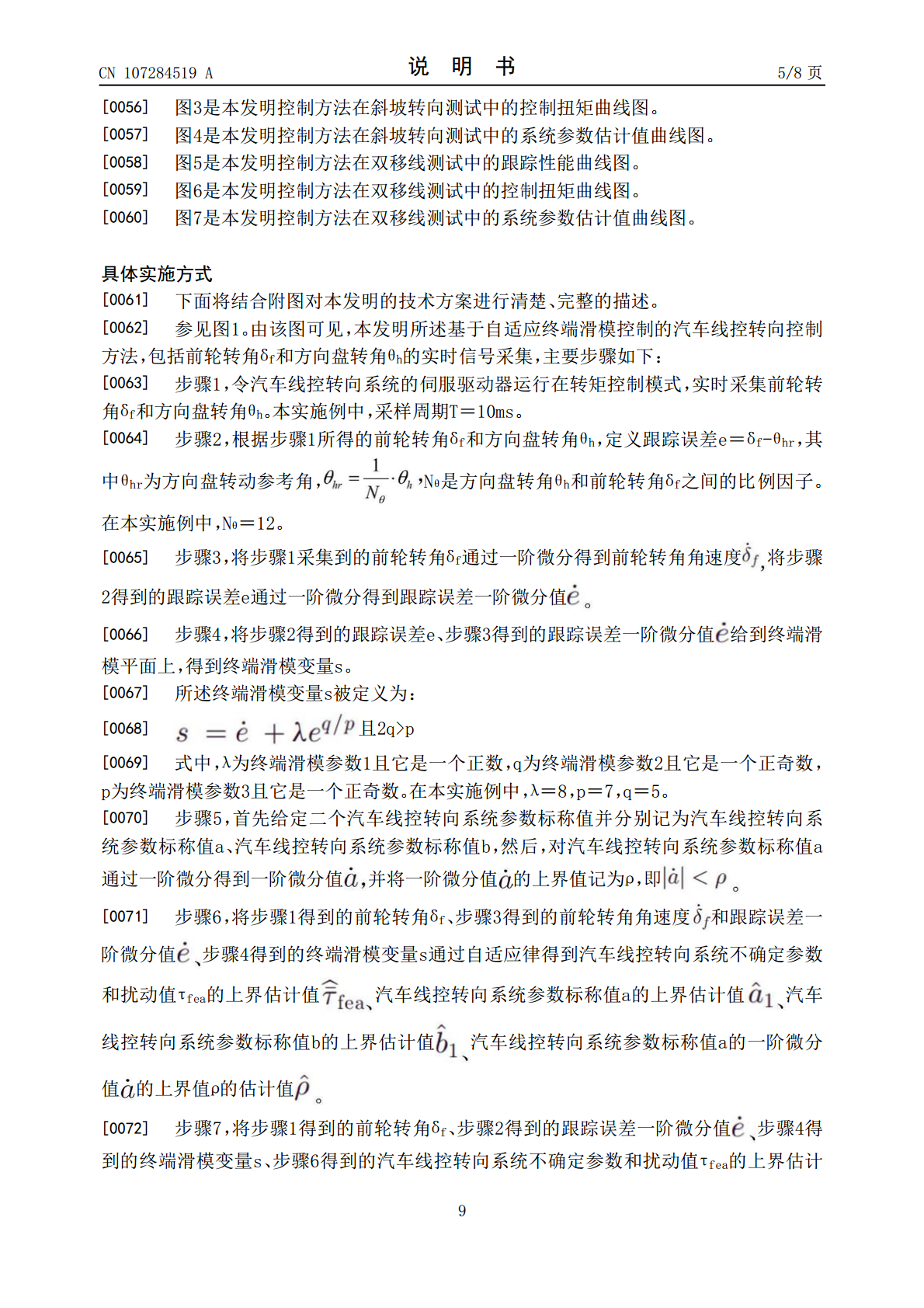
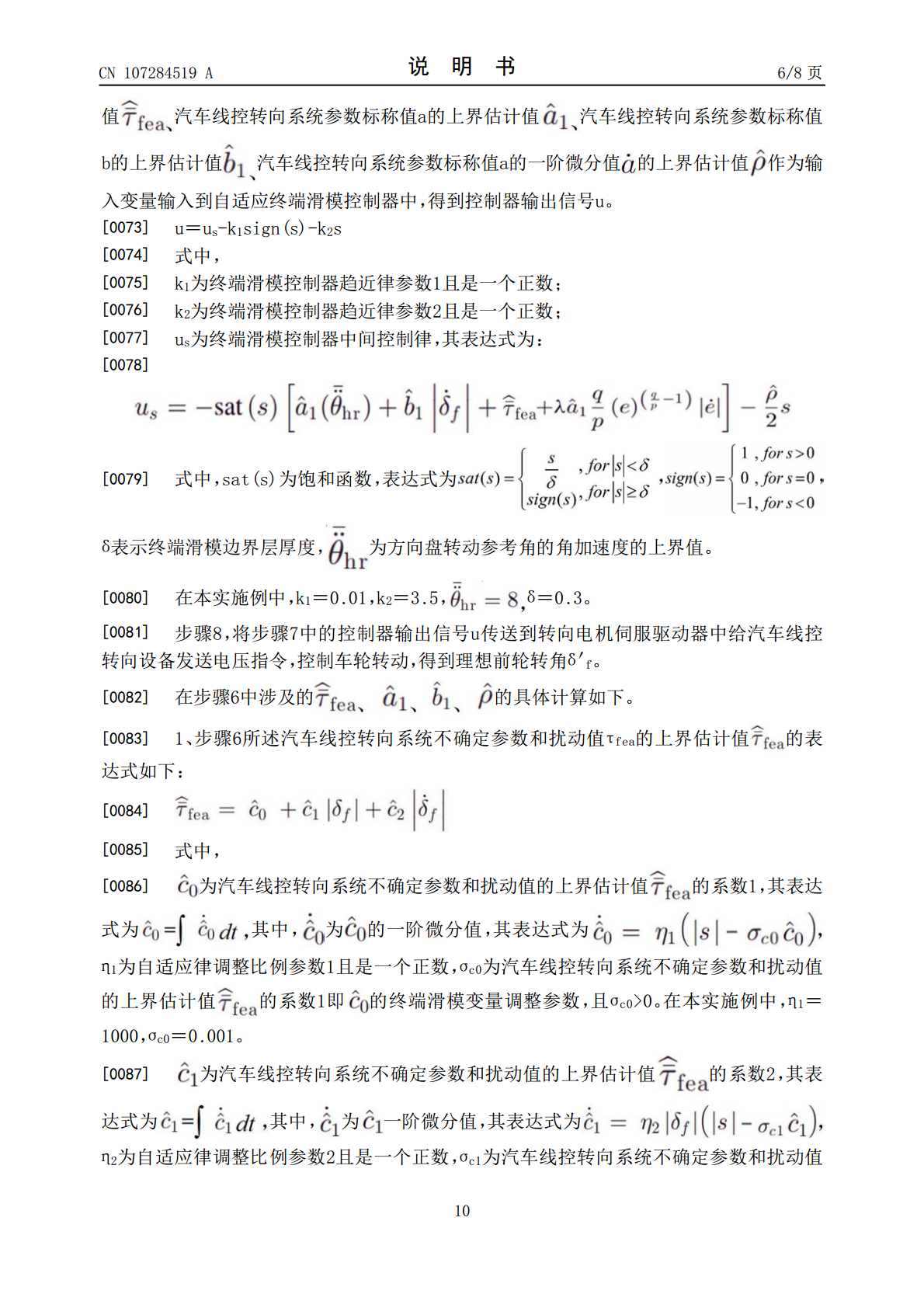
本发明公开了一种基于自适应终端滑模控制的汽车线控转向系统控制方法,步骤包括实时采集前轮转角δ
基于滑模补偿器技术的线控转向系统控制方法.pdf
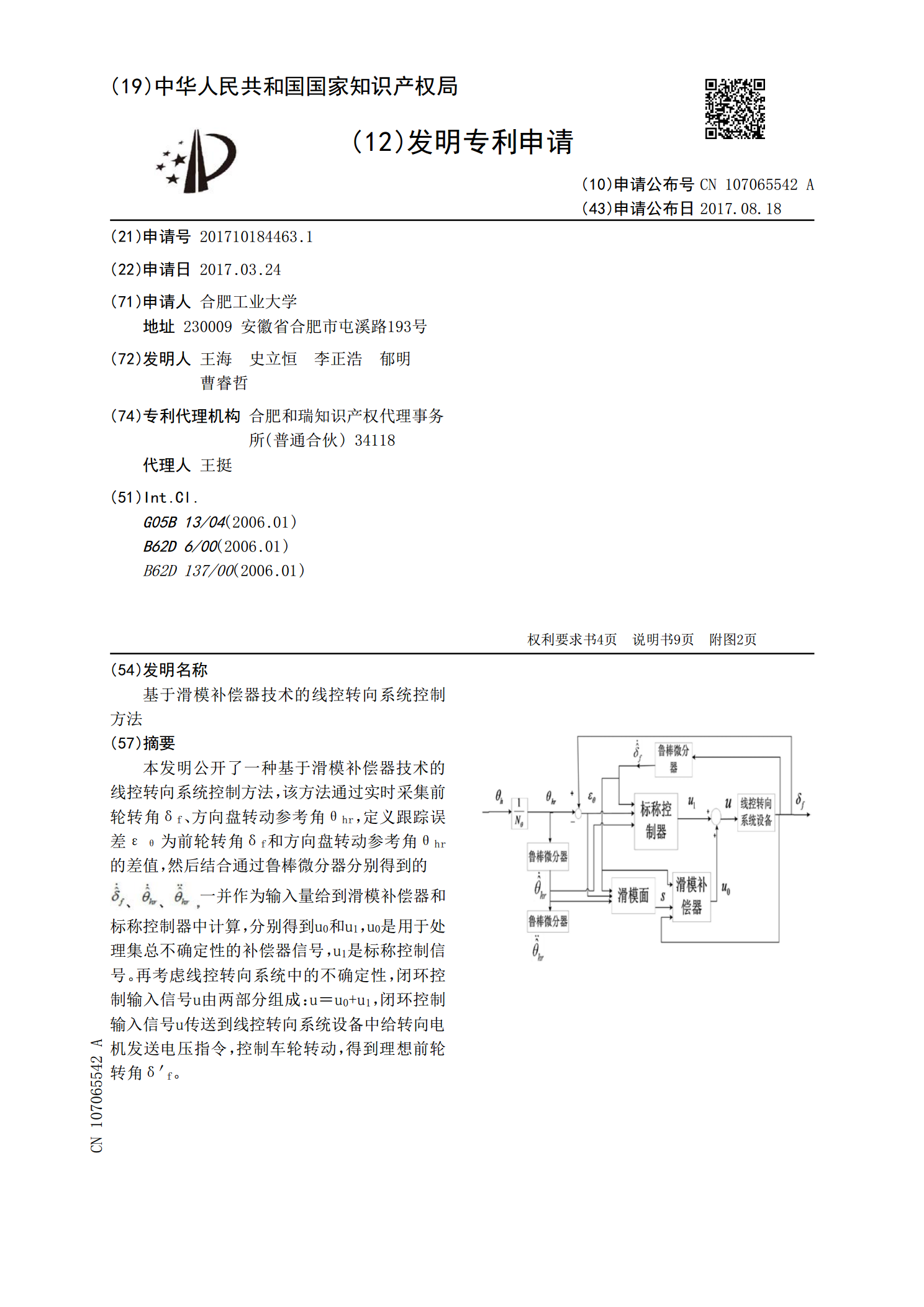
本发明公开了一种基于滑模补偿器技术的线控转向系统控制方法,该方法通过实时采集前轮转角δ
基于TDE的自适应超螺旋多变量快速终端滑模控制方法.pdf
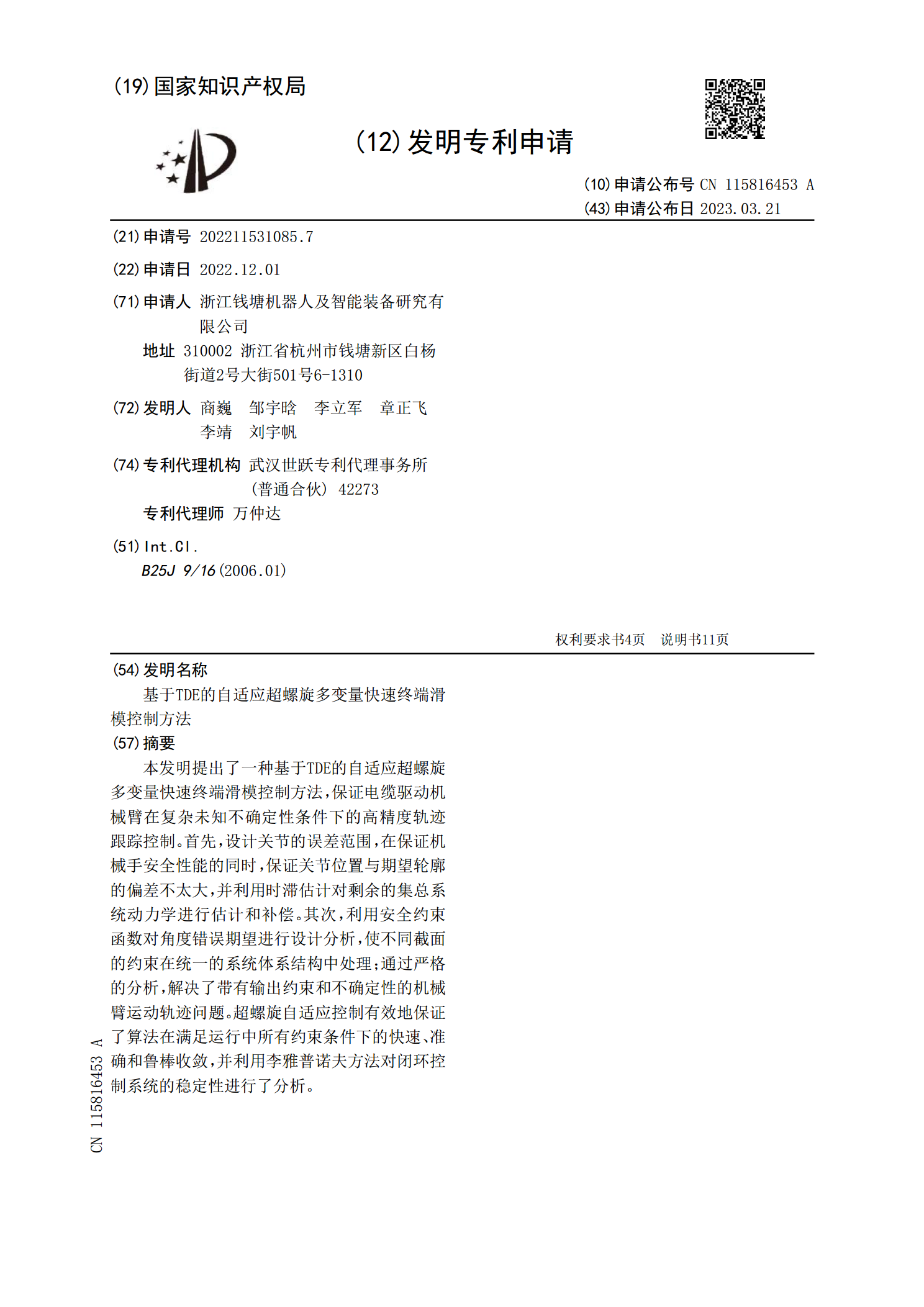
本发明提出了一种基于TDE的自适应超螺旋多变量快速终端滑模控制方法,保证电缆驱动机械臂在复杂未知不确定性条件下的高精度轨迹跟踪控制。首先,设计关节的误差范围,在保证机械手安全性能的同时,保证关节位置与期望轮廓的偏差不太大,并利用时滞估计对剩余的集总系统动力学进行估计和补偿。其次,利用安全约束函数对角度错误期望进行设计分析,使不同截面的约束在统一的系统体系结构中处理;通过严格的分析,解决了带有输出约束和不确定性的机械臂运动轨迹问题。超螺旋自适应控制有效地保证了算法在满足运行中所有约束条件下的快速、准确和鲁棒
一种基于自适应跟踪控制的线控转向系统及控制方法.pdf
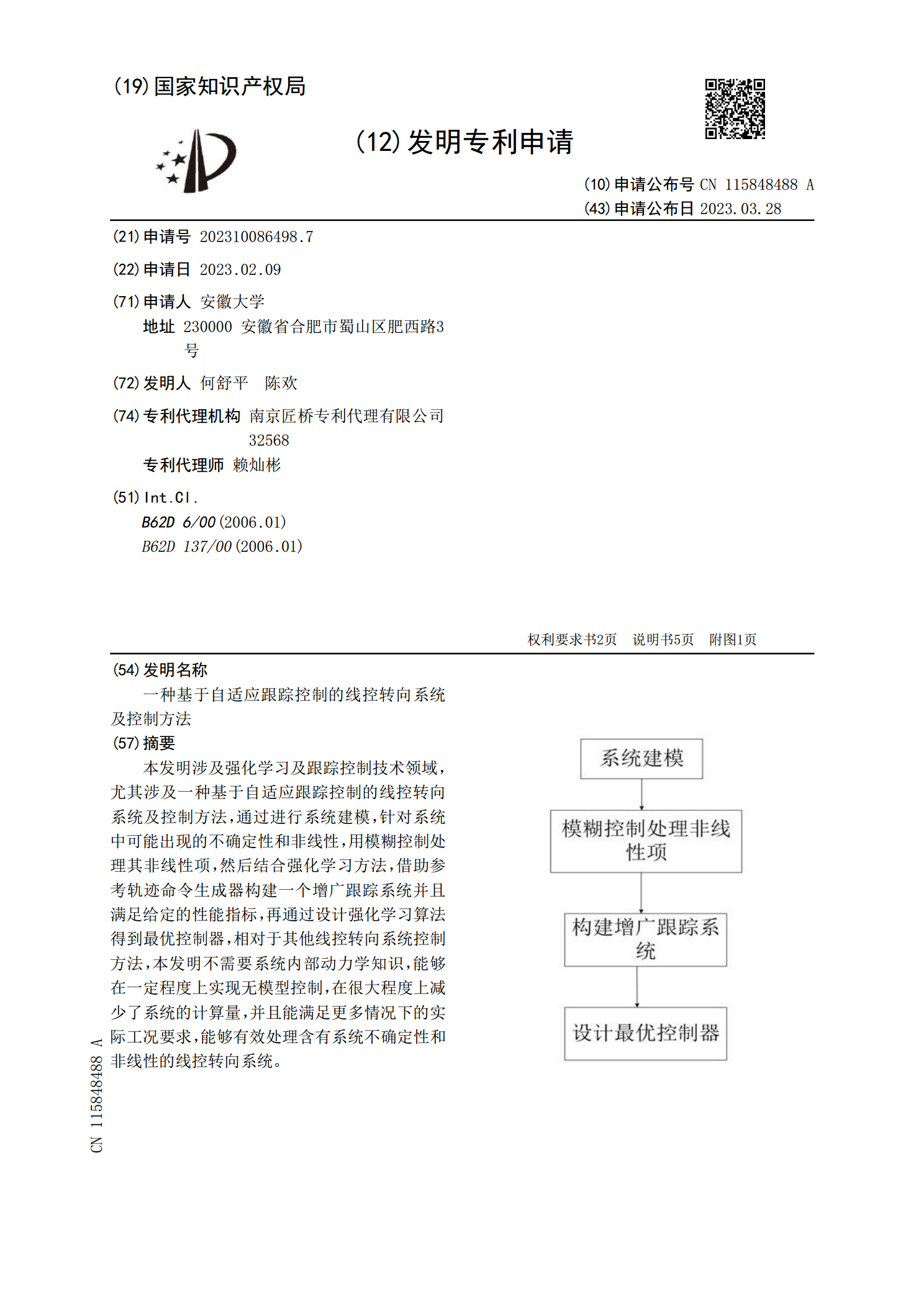
本发明涉及强化学习及跟踪控制技术领域,尤其涉及一种基于自适应跟踪控制的线控转向系统及控制方法,通过进行系统建模,针对系统中可能出现的不确定性和非线性,用模糊控制处理其非线性项,然后结合强化学习方法,借助参考轨迹命令生成器构建一个增广跟踪系统并且满足给定的性能指标,再通过设计强化学习算法得到最优控制器,相对于其他线控转向系统控制方法,本发明不需要系统内部动力学知识,能够在一定程度上实现无模型控制,在很大程度上减少了系统的计算量,并且能满足更多情况下的实际工况要求,能够有效处理含有系统不确定性和非线性的线控转

基于线控技术的汽车电控转向路感控制方法.pdf
本发明公开了一种基于线控技术的汽车电控转向路感控制方法,步骤:1.系统初始化,如无故障则通过到步骤2;2.方向盘转角和前轮转角对中,即保证方向盘转角和转向前轮转角均在零点时,触发路感控制功能,并进入步骤3;3.采集和辨识转向系统以及车辆状态和参数的相关信号;4.对步骤3采集的信息进行处理,计算得到理想路感反馈目标转矩值;5.通过步骤4计算得到的目标转矩值,对路感模拟电机进行闭环控制,实现目标转矩值;6.根据路感模拟电机的运行状态,采用补偿控制方法对路感电机转矩值进行补偿控制,重复步骤3到步骤6的工作,直到