
一种工业机器人的打磨抛光工具及打磨抛光控制方法.pdf

是你****噩呀

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10

9/10
10/10
亲,该文档总共13页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种工业机器人的打磨抛光工具及打磨抛光控制方法.pdf
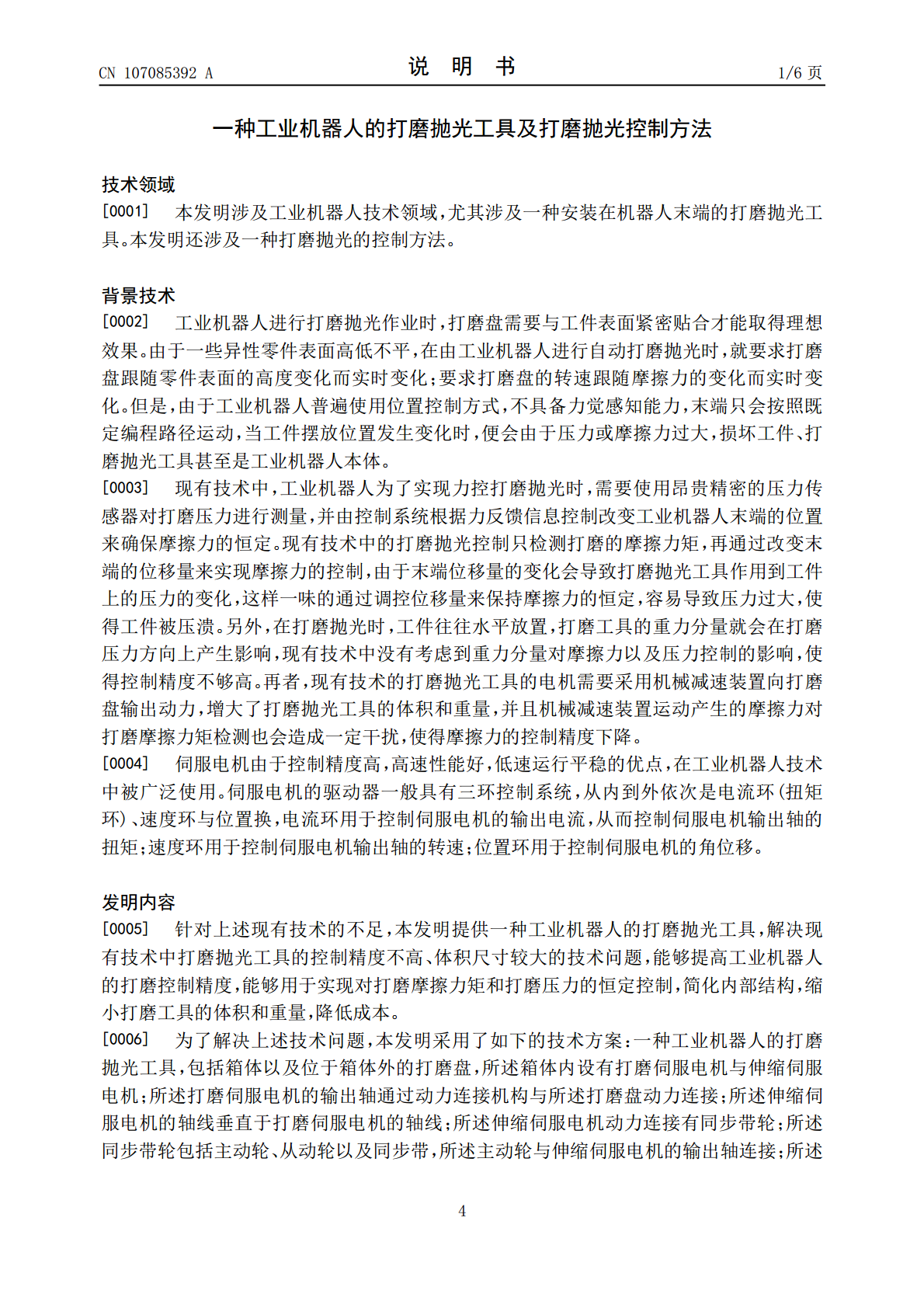
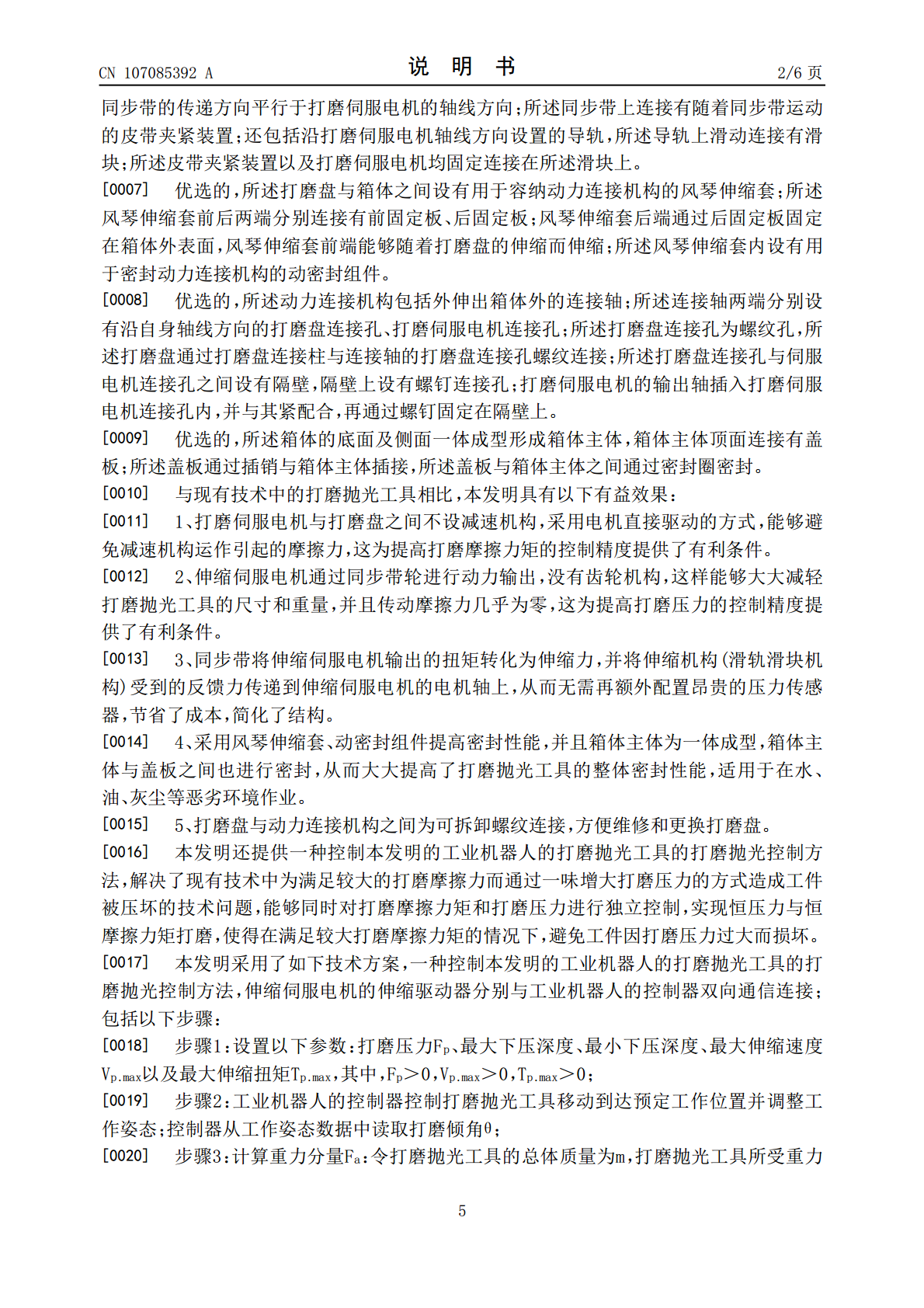
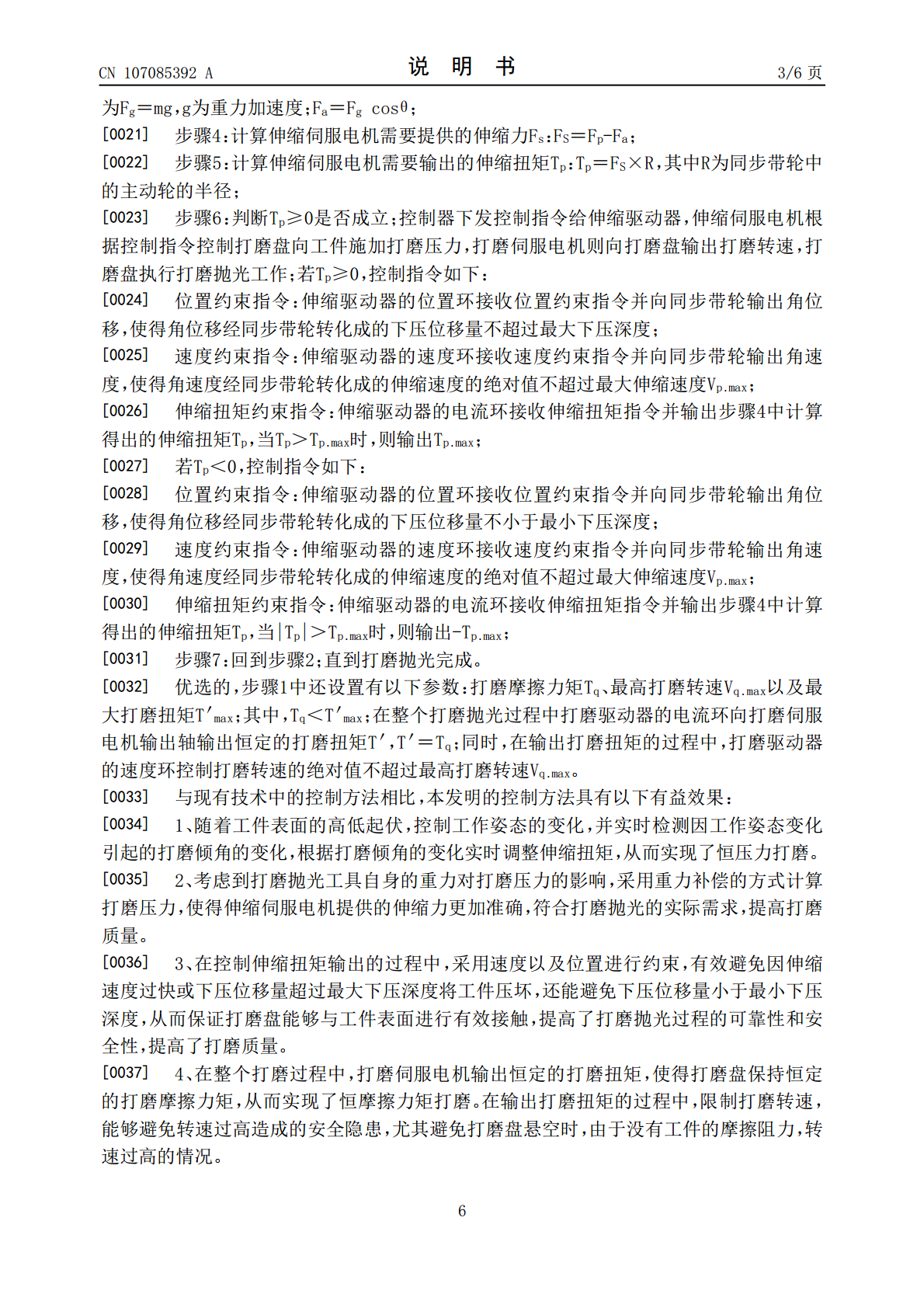
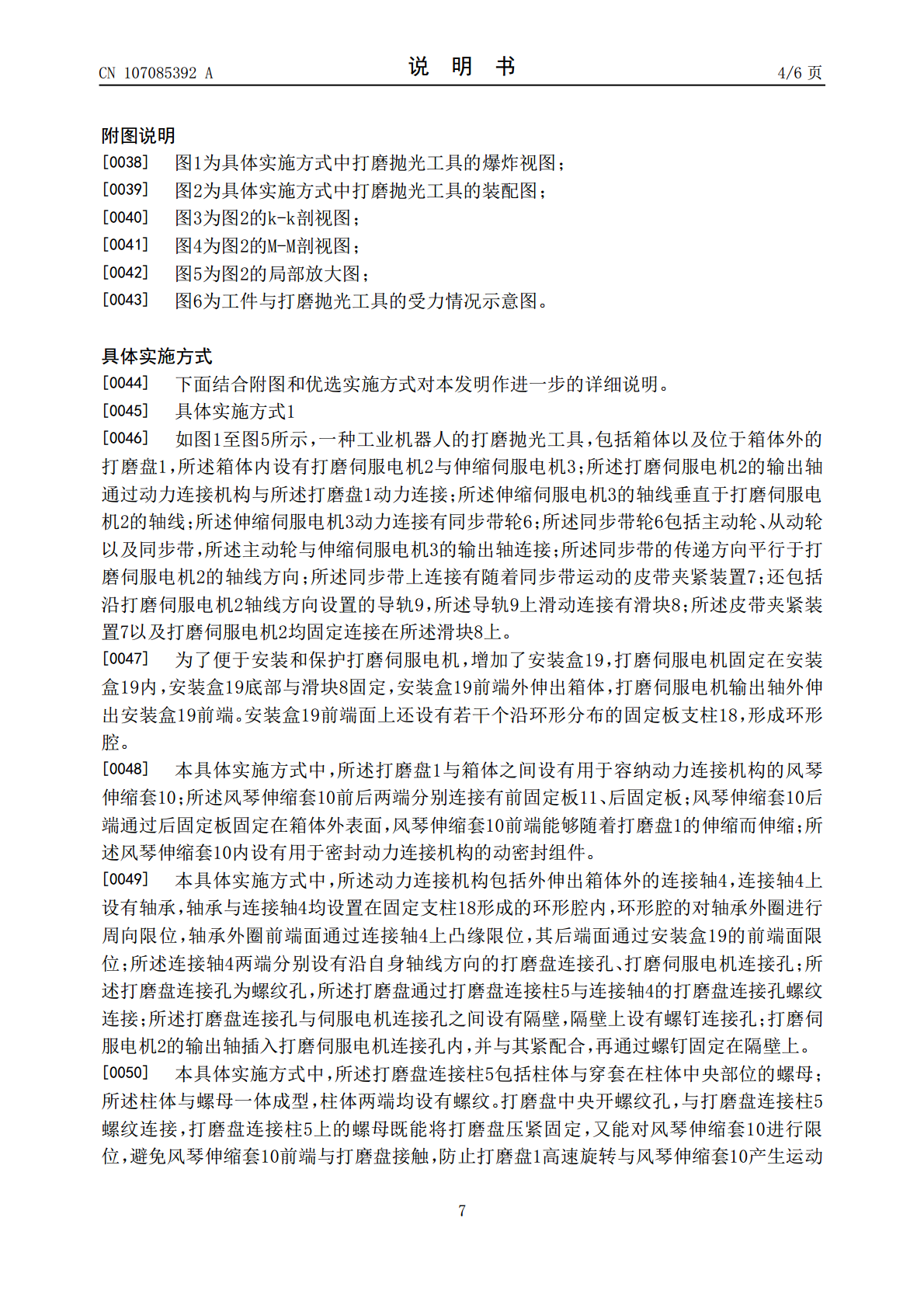
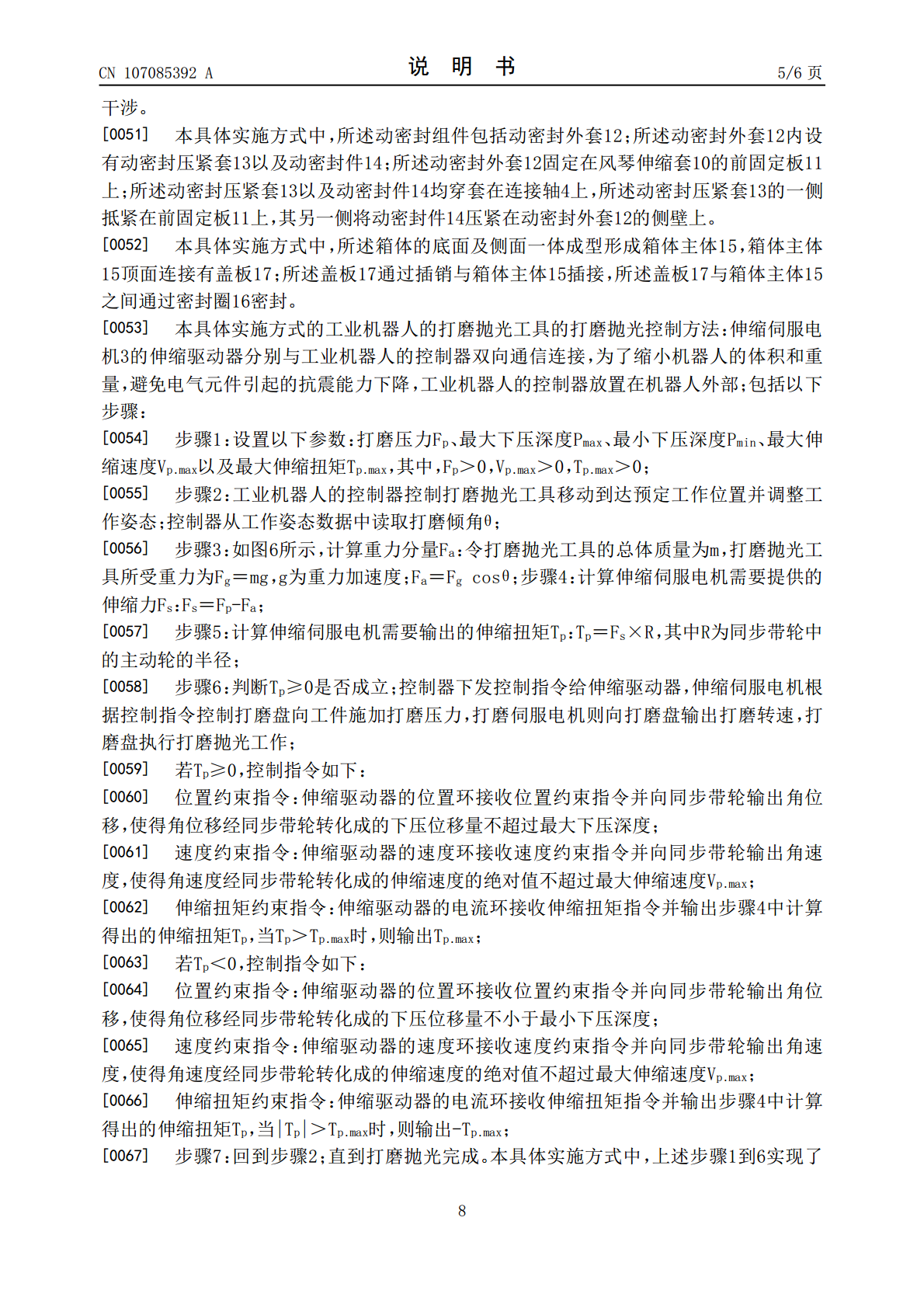
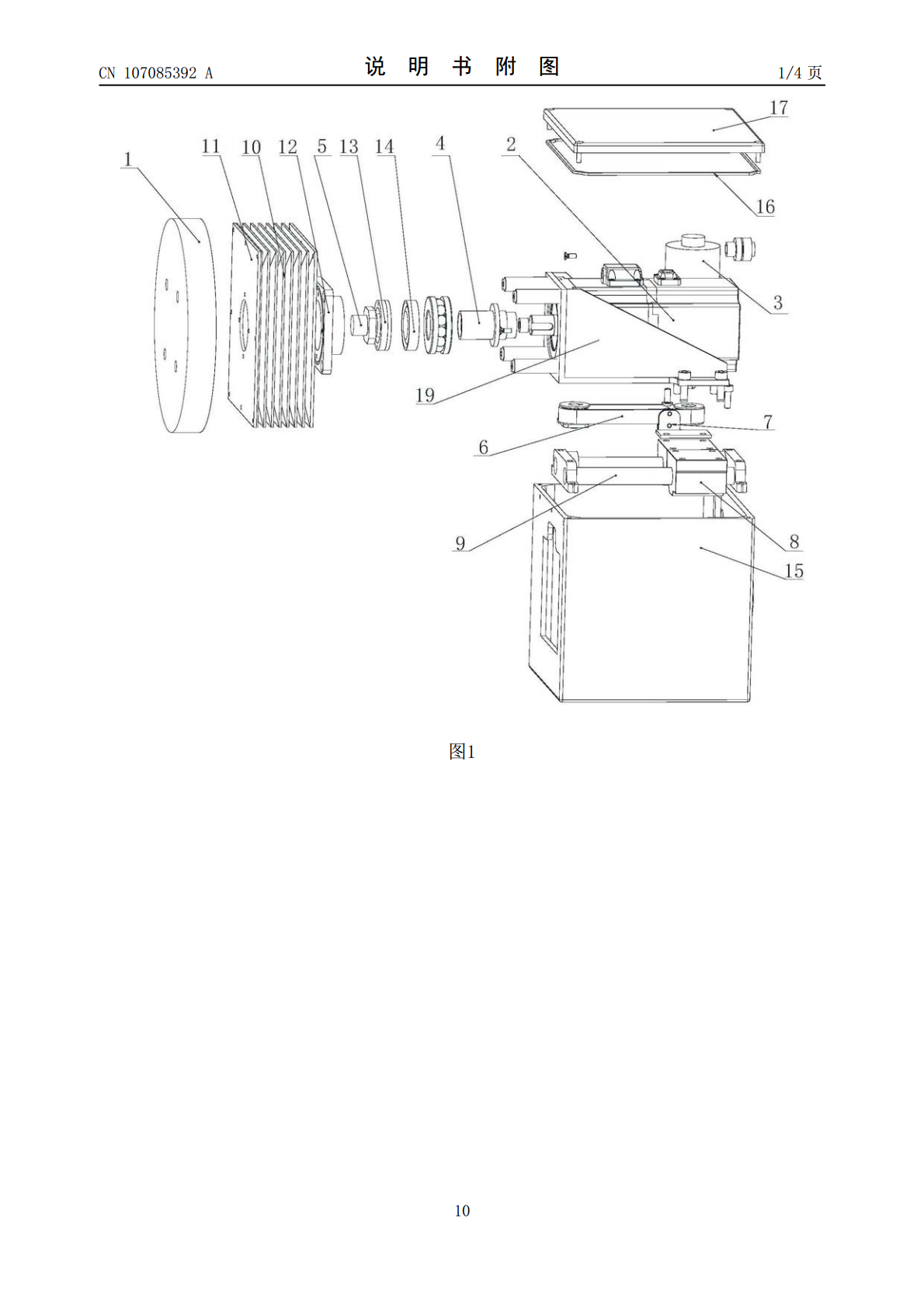
本发明公开了一种工业机器人的打磨抛光工具,包括箱体与打磨盘,箱体内设有打磨伺服电机与伸缩伺服电机;打磨伺服电与打磨盘动力连接;伸缩伺服电机的轴线垂直于打磨伺服电机;伸缩伺服电机动力连接有同步带轮;同步带的传递方向平行于打磨伺服电机的轴线方向;同步带上连接有皮带夹紧装置;还包括导轨,导轨上滑动连接有滑块;皮带夹紧装置以及打磨伺服电机均固定在滑块上。还公开了一种控制方法:控制器实时读取打磨倾角θ,根据θ计算重力分量F
一种基于机器人的打磨抛光方法.pdf
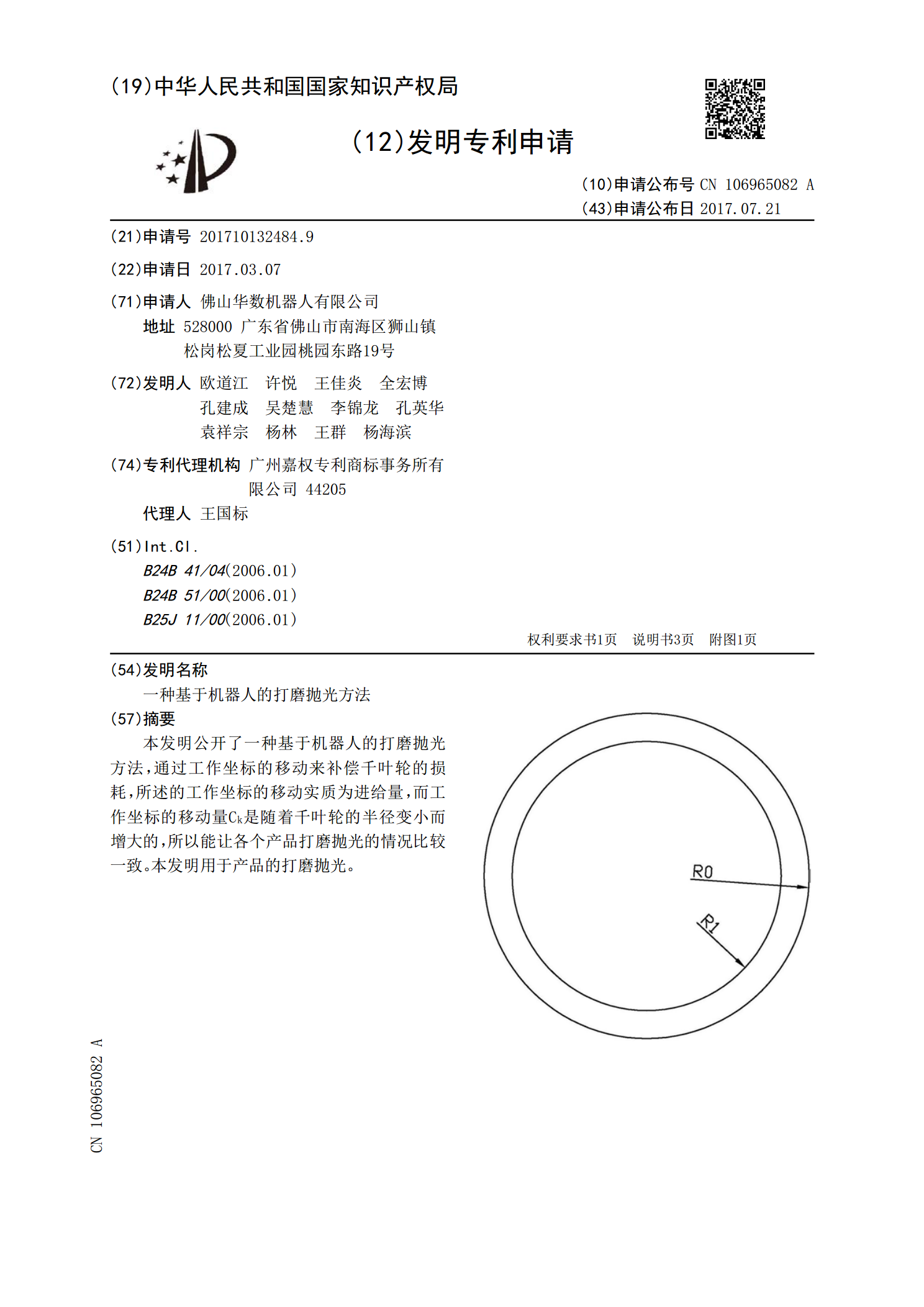
本发明公开了一种基于机器人的打磨抛光方法,通过工作坐标的移动来补偿千叶轮的损耗,所述的工作坐标的移动实质为进给量,而工作坐标的移动量C
一种抛光打磨方法.pdf
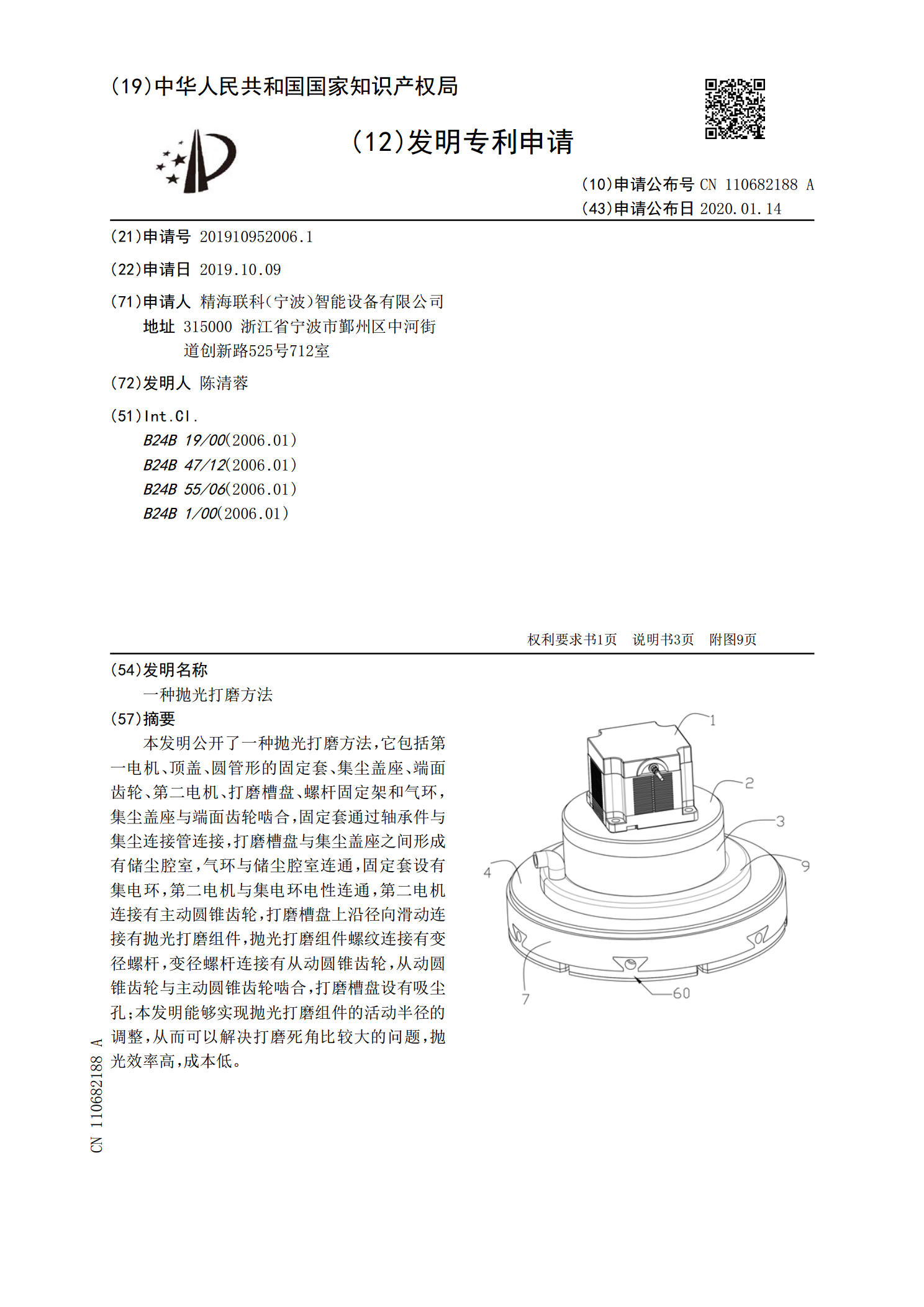
本发明公开了一种抛光打磨方法,它包括第一电机、顶盖、圆管形的固定套、集尘盖座、端面齿轮、第二电机、打磨槽盘、螺杆固定架和气环,集尘盖座与端面齿轮啮合,固定套通过轴承件与集尘连接管连接,打磨槽盘与集尘盖座之间形成有储尘腔室,气环与储尘腔室连通,固定套设有集电环,第二电机与集电环电性连通,第二电机连接有主动圆锥齿轮,打磨槽盘上沿径向滑动连接有抛光打磨组件,抛光打磨组件螺纹连接有变径螺杆,变径螺杆连接有从动圆锥齿轮,从动圆锥齿轮与主动圆锥齿轮啮合,打磨槽盘设有吸尘孔;本发明能够实现抛光打磨组件的活动半径的调整,
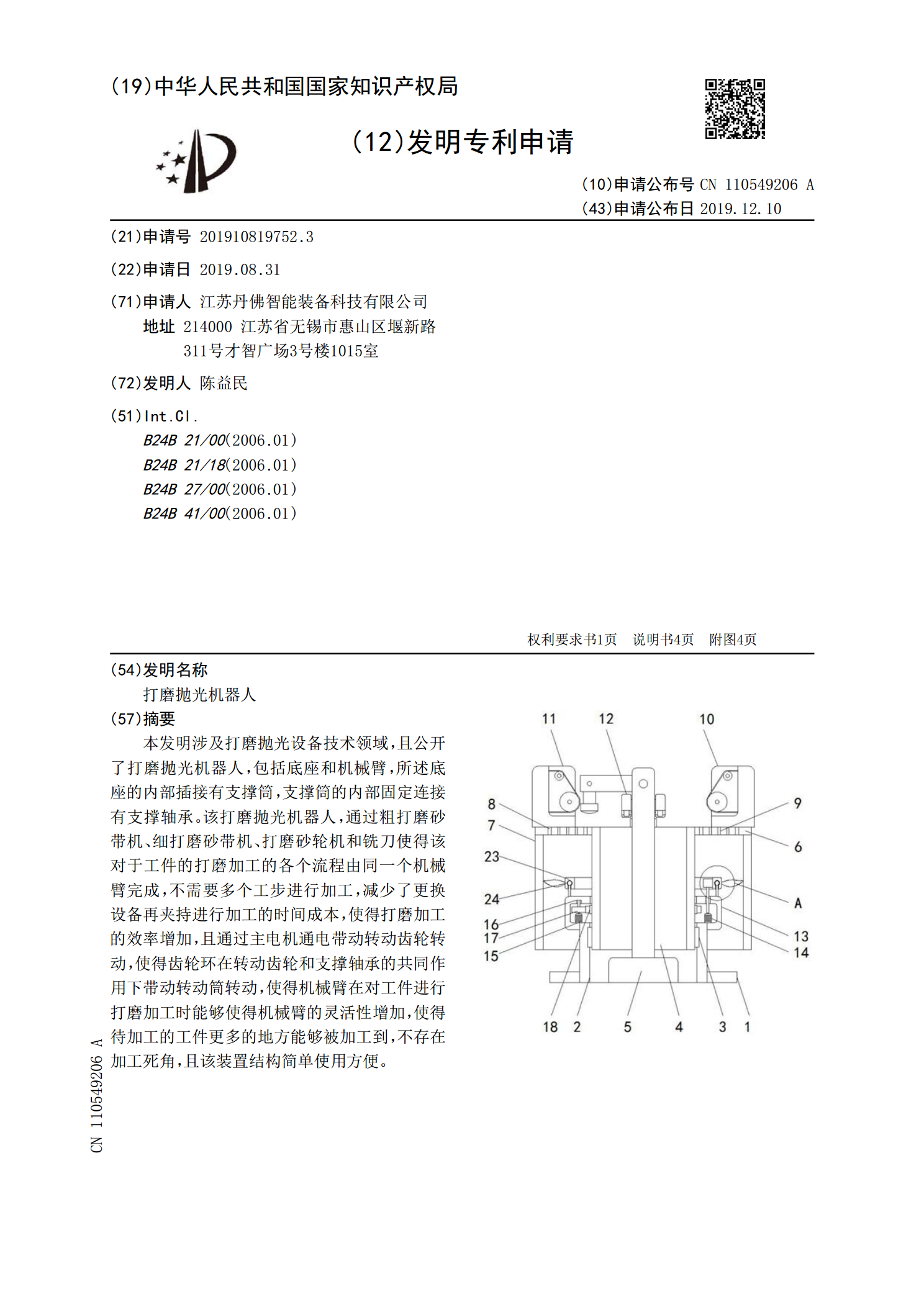
打磨抛光机器人.pdf
本发明涉及打磨抛光设备技术领域,且公开了打磨抛光机器人,包括底座和机械臂,所述底座的内部插接有支撑筒,支撑筒的内部固定连接有支撑轴承。该打磨抛光机器人,通过粗打磨砂带机、细打磨砂带机、打磨砂轮机和铣刀使得该对于工件的打磨加工的各个流程由同一个机械臂完成,不需要多个工步进行加工,减少了更换设备再夹持进行加工的时间成本,使得打磨加工的效率增加,且通过主电机通电带动转动齿轮转动,使得齿轮环在转动齿轮和支撑轴承的共同作用下带动转动筒转动,使得机械臂在对工件进行打磨加工时能够使得机械臂的灵活性增加,使得待加工的工件
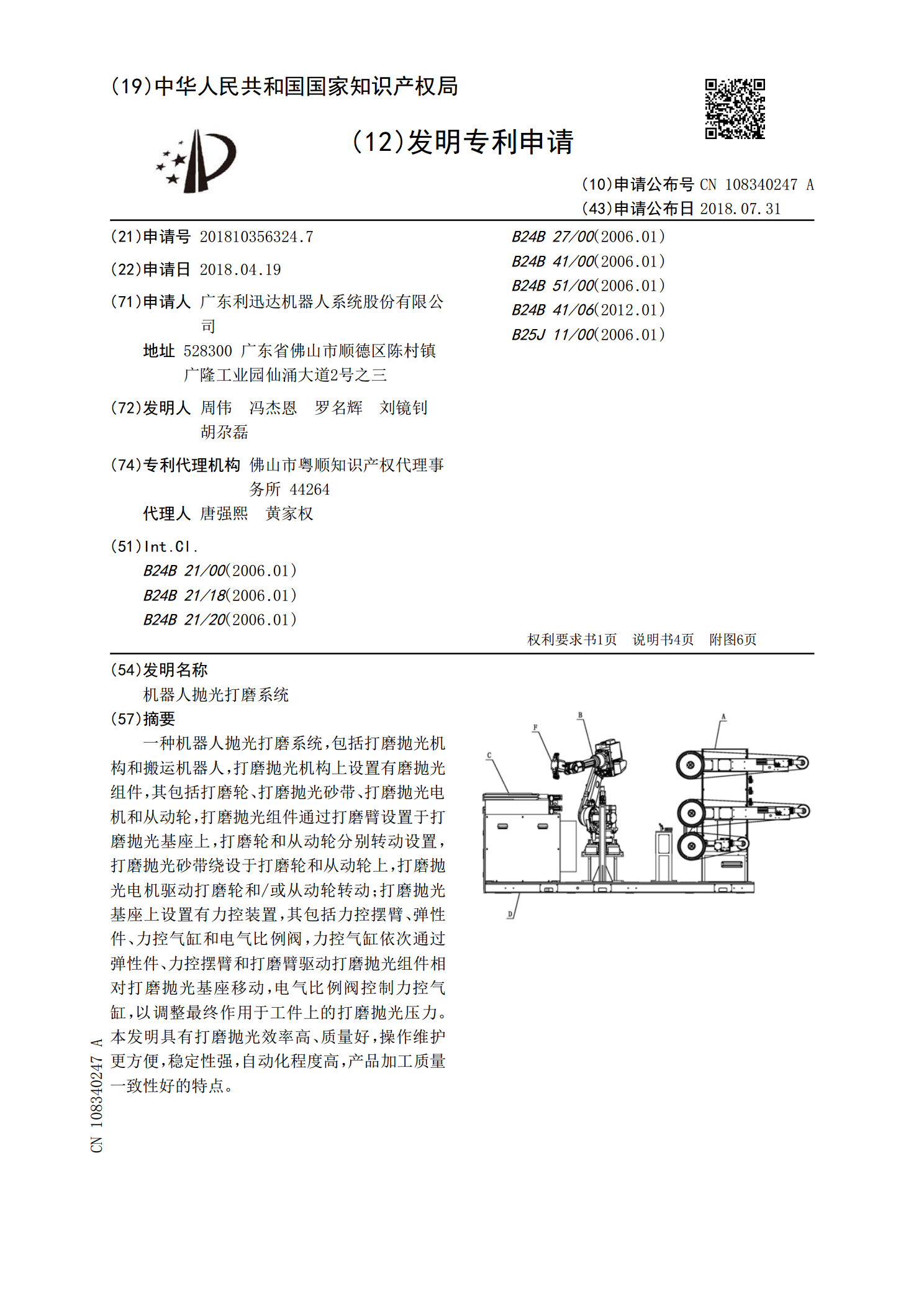
机器人抛光打磨系统.pdf
一种机器人抛光打磨系统,包括打磨抛光机构和搬运机器人,打磨抛光机构上设置有磨抛光组件,其包括打磨轮、打磨抛光砂带、打磨抛光电机和从动轮,打磨抛光组件通过打磨臂设置于打磨抛光基座上,打磨轮和从动轮分别转动设置,打磨抛光砂带绕设于打磨轮和从动轮上,打磨抛光电机驱动打磨轮和/或从动轮转动;打磨抛光基座上设置有力控装置,其包括力控摆臂、弹性件、力控气缸和电气比例阀,力控气缸依次通过弹性件、力控摆臂和打磨臂驱动打磨抛光组件相对打磨抛光基座移动,电气比例阀控制力控气缸,以调整最终作用于工件上的打磨抛光压力。本发明具有