
机器人行走装置和轮式机器人.pdf

是你****馨呀

1/10
2/10
3/10
4/10

5/10
6/10
7/10

8/10
9/10
10/10
亲,该文档总共13页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

机器人行走装置和轮式机器人.pdf
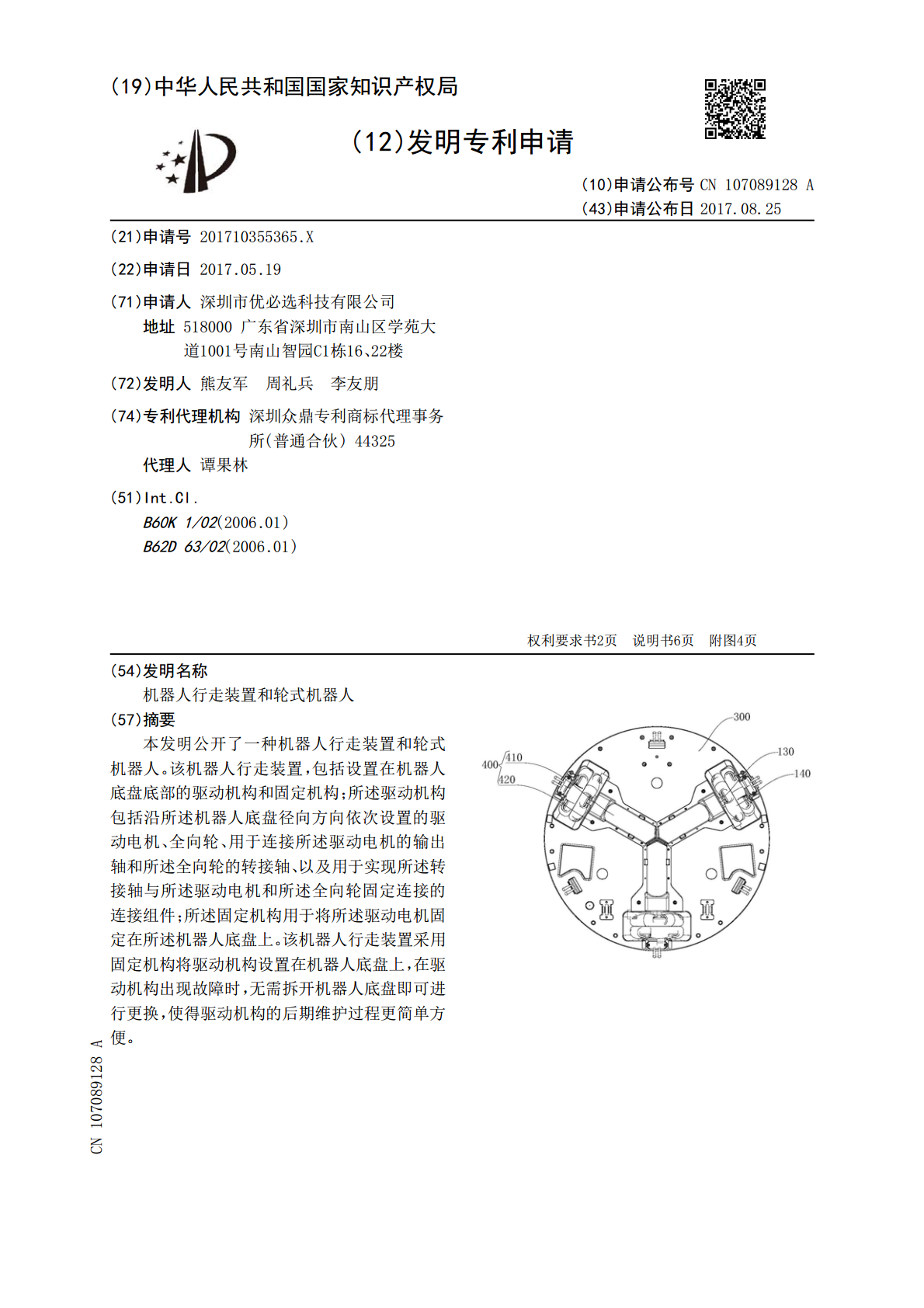
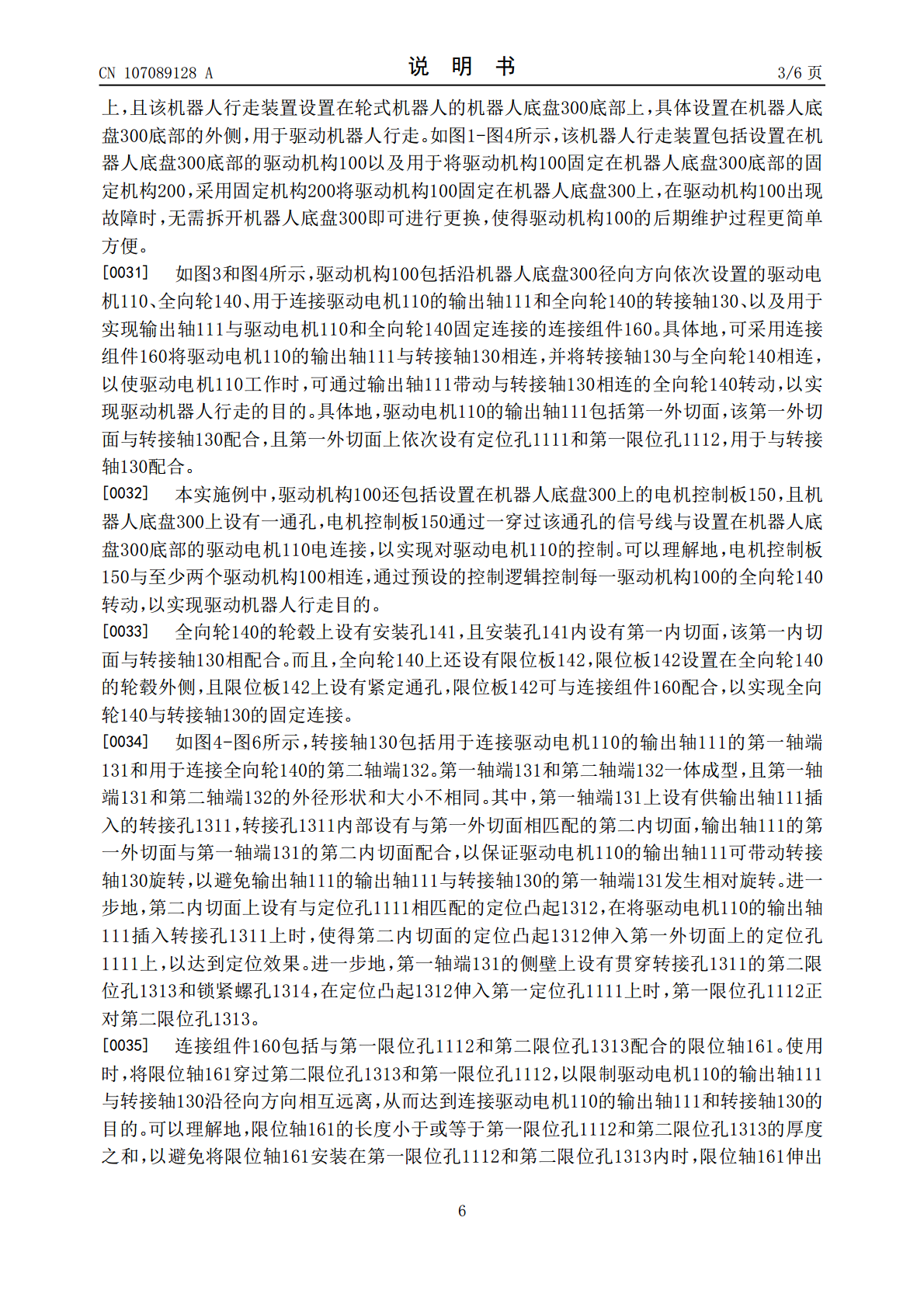
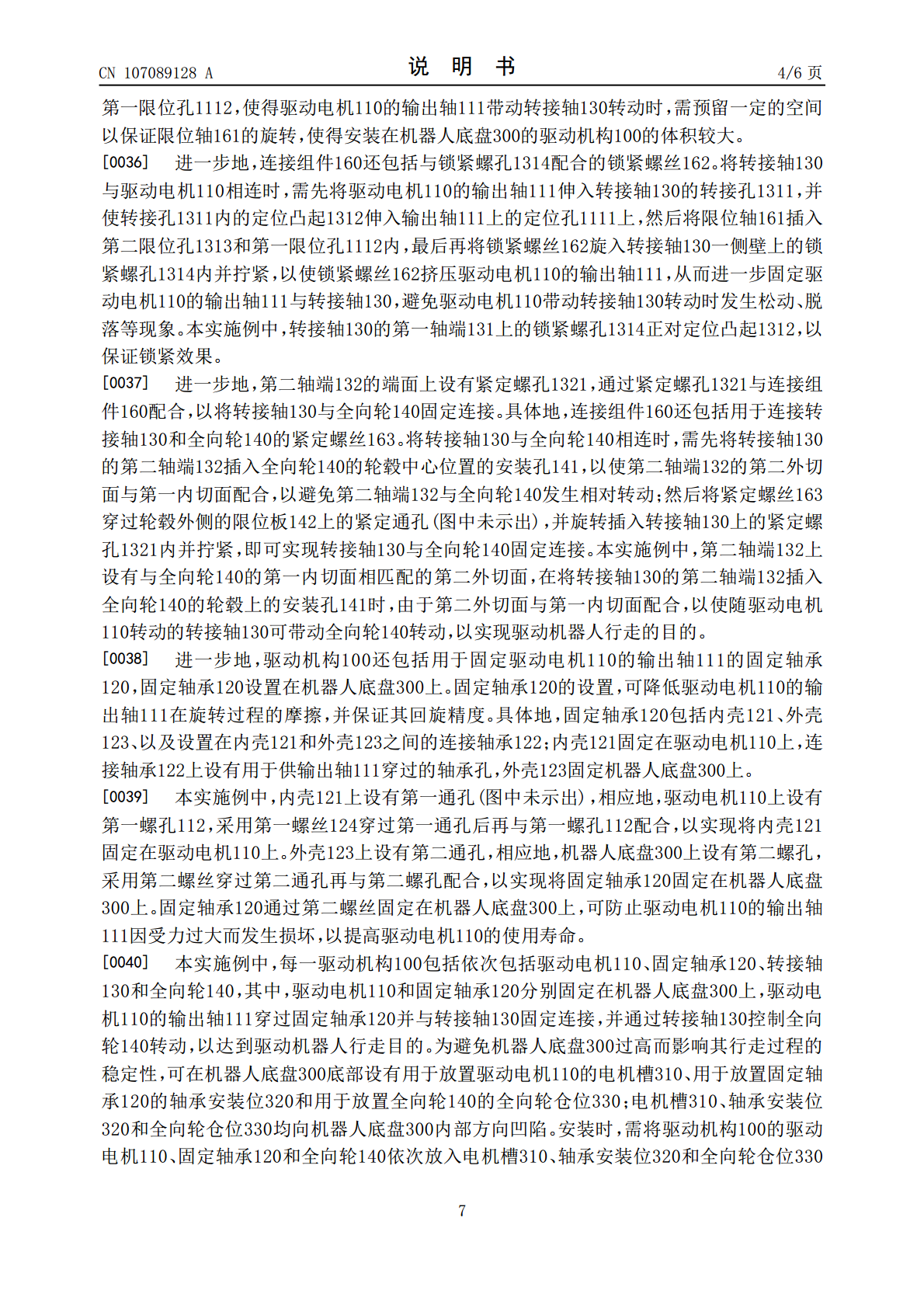
本发明公开了一种机器人行走装置和轮式机器人。该机器人行走装置,包括设置在机器人底盘底部的驱动机构和固定机构;所述驱动机构包括沿所述机器人底盘径向方向依次设置的驱动电机、全向轮、用于连接所述驱动电机的输出轴和所述全向轮的转接轴、以及用于实现所述转接轴与所述驱动电机和所述全向轮固定连接的连接组件;所述固定机构用于将所述驱动电机固定在所述机器人底盘上。该机器人行走装置采用固定机构将驱动机构设置在机器人底盘上,在驱动机构出现故障时,无需拆开机器人底盘即可进行更换,使得驱动机构的后期维护过程更简单方便。
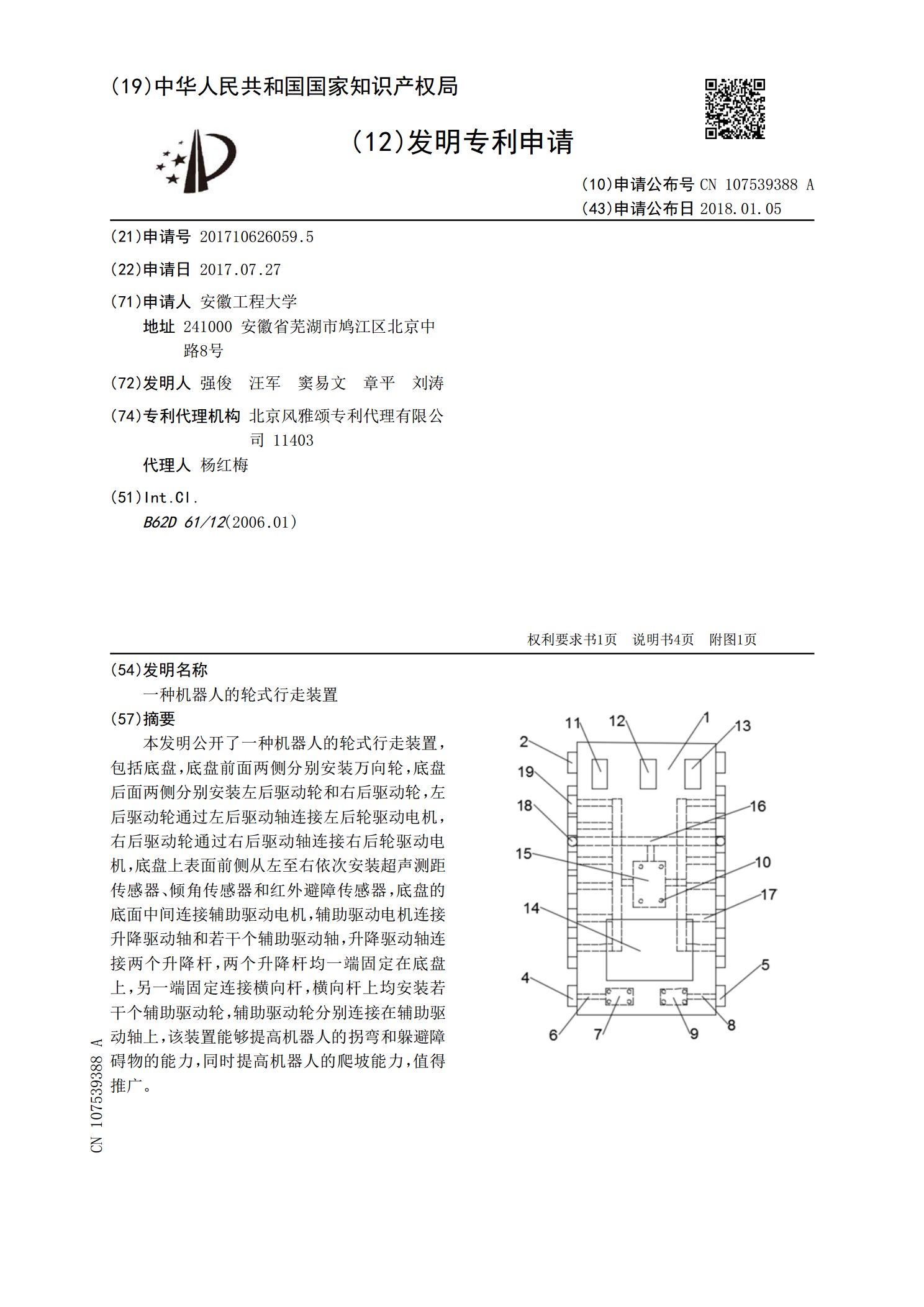
一种机器人的轮式行走装置.pdf
本发明公开了一种机器人的轮式行走装置,包括底盘,底盘前面两侧分别安装万向轮,底盘后面两侧分别安装左后驱动轮和右后驱动轮,左后驱动轮通过左后驱动轴连接左后轮驱动电机,右后驱动轮通过右后驱动轴连接右后轮驱动电机,底盘上表面前侧从左至右依次安装超声测距传感器、倾角传感器和红外避障传感器,底盘的底面中间连接辅助驱动电机,辅助驱动电机连接升降驱动轴和若干个辅助驱动轴,升降驱动轴连接两个升降杆,两个升降杆均一端固定在底盘上,另一端固定连接横向杆,横向杆上均安装若干个辅助驱动轮,辅助驱动轮分别连接在辅助驱动轴上,该装置

行走装置底盘和机器人.pdf
本发明公开了一种行走装置底盘和机器人。本发明的行走装置底盘包括底盘本体、两个驱动轮、第一万向轮和第二万向轮。两个驱动轮分别设置于底盘本体的横向左右两侧。第一万向轮和第二万向轮设置于底盘本体上且在纵向方向上相互错开并位于两个驱动轮的同一侧。本发明的行走装置底盘在通过凹入部障碍时,第一万向轮会先运行到凹入部障碍的上方,此时第二万向轮与两个驱动轮共同支撑底盘本体,因此底盘依旧可以保持平稳运动,第一万向轮不会陷入凹入部中。随着底盘运动,第一万向轮越过凹入部,第二万向轮运行到凹入部上方,此时由于第一万向轮与两个驱动

轮式仿生行走康复机器人.pdf
轮式仿生行走康复机器人。目前想要对瘫痪病人的手脚进行适当的锻炼时,需要靠人来帮忙,十分麻烦。本发明组成包括:底架(13),底架与提升架(11)的下部铰接并通过支撑液压缸(14)支撑,提升架上下两侧分别设置抬升轮组(8),上侧抬升轮组上的支撑轮(16)支撑在手臂支轮(22)上,手臂支轮与底架上侧设置的两个手臂支杆(1)下部通过转轴连接,下侧抬升轮组两侧的支撑轮支撑在腿部支轮(23)上,腿部支轮与铰接连杆(21)的铰接处通过转轴连接,铰接连杆与底架下侧设置的两个腿部支杆(5)铰接,手臂支杆的两侧设置有一组手臂

复合轮式机器人行走机构.pdf
本发明公开了一种复合轮式机器人行走机构,包括底盘、大功率电机、控制器和四个复合轮式机构,所述大功率电机固定于所述底盘上,所述复合轮式机构包括一个十字行星架、两个主动轮和两个从动轮,所述主动轮和所述从动轮间隔设于所述十字行星架的架杆端部,所述大功率电机通过传动机构驱动所述十字行星架,所述主动轮分别通过小功率电机驱动,所述底盘两侧相对的两个所述十字行星架之间通过同步轴连接,所述同步轴上设有电刷开关,所述电刷开关包括定子和转子,所述转子套设于所述同步轴上,所述定子通过导线连接所述控制器,所述转子通过导线连接所述