
复合轮式机器人行走机构.pdf

书生****瑞梦

1/10
2/10
3/10
4/10

5/10

6/10
7/10
8/10

9/10
10/10
亲,该文档总共13页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

复合轮式机器人行走机构.pdf
本发明公开了一种复合轮式机器人行走机构,包括底盘、大功率电机、控制器和四个复合轮式机构,所述大功率电机固定于所述底盘上,所述复合轮式机构包括一个十字行星架、两个主动轮和两个从动轮,所述主动轮和所述从动轮间隔设于所述十字行星架的架杆端部,所述大功率电机通过传动机构驱动所述十字行星架,所述主动轮分别通过小功率电机驱动,所述底盘两侧相对的两个所述十字行星架之间通过同步轴连接,所述同步轴上设有电刷开关,所述电刷开关包括定子和转子,所述转子套设于所述同步轴上,所述定子通过导线连接所述控制器,所述转子通过导线连接所述
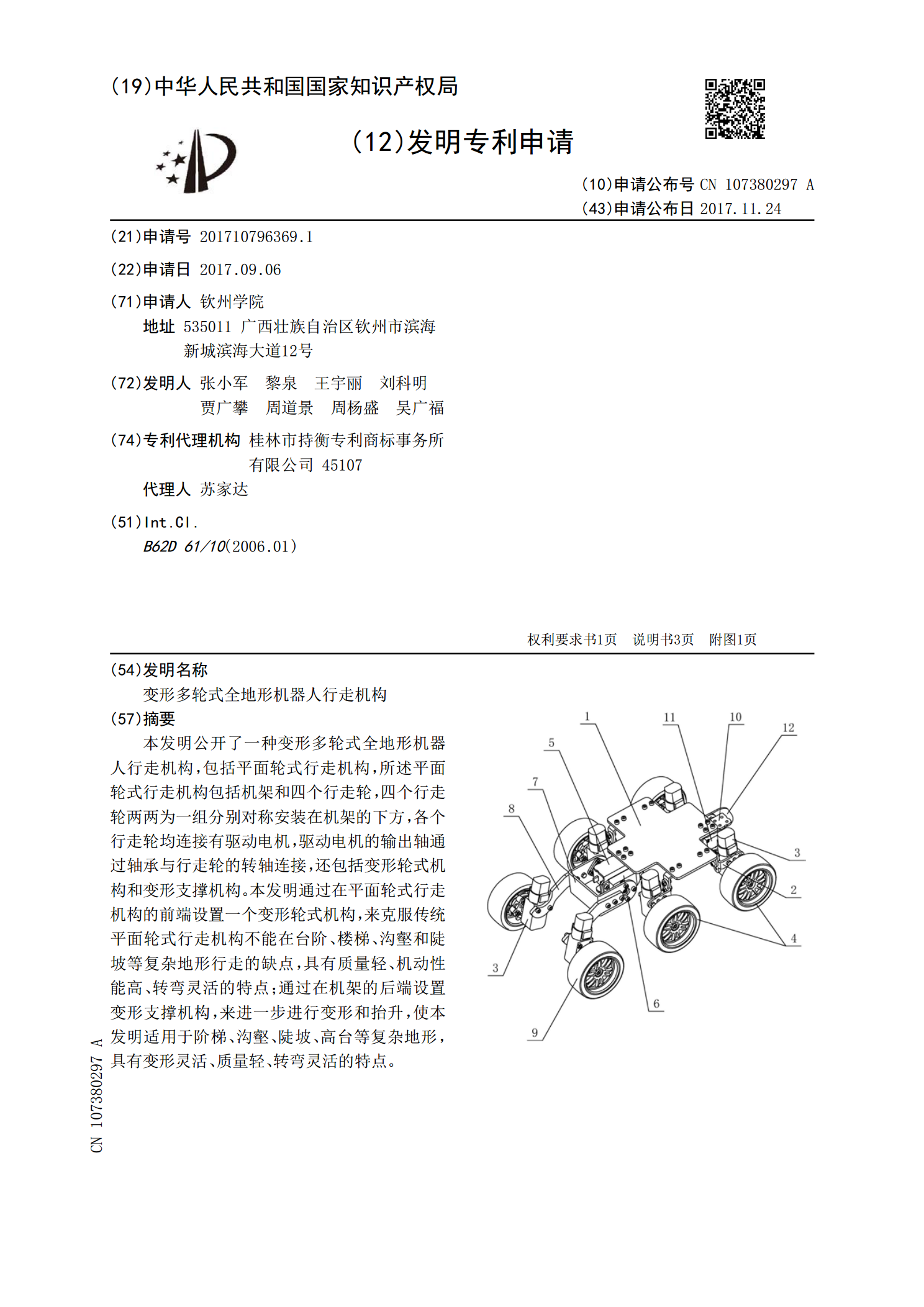
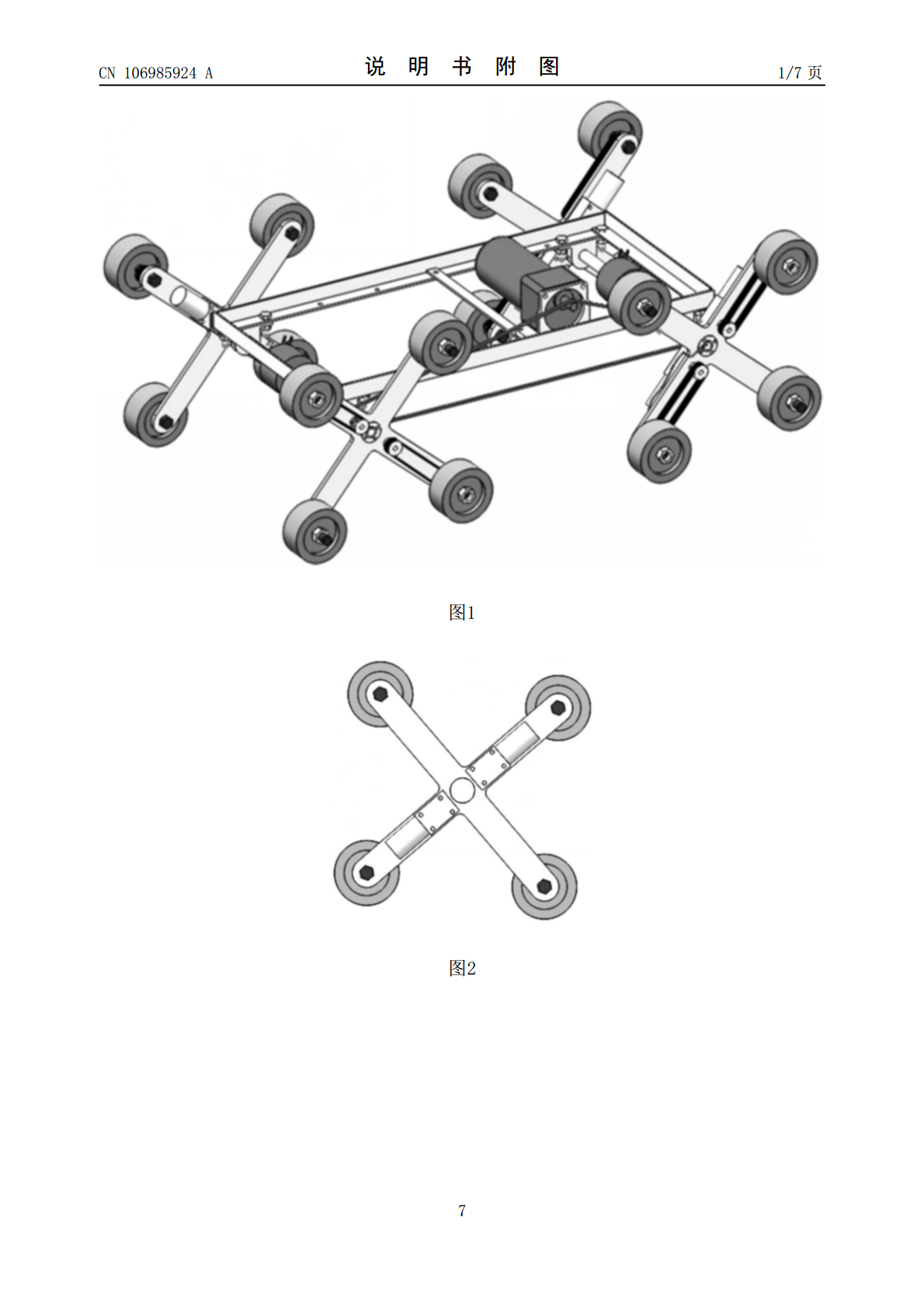
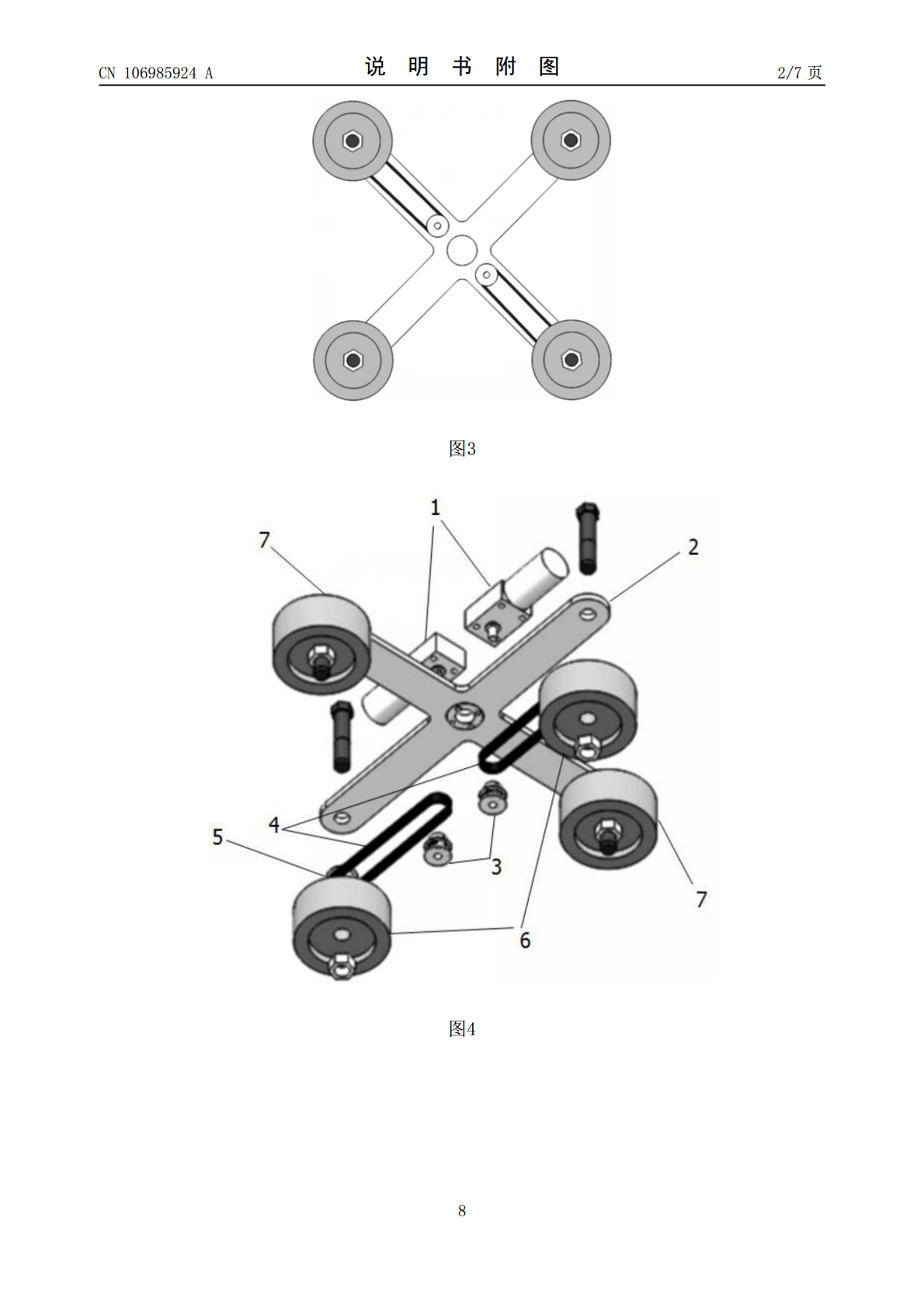
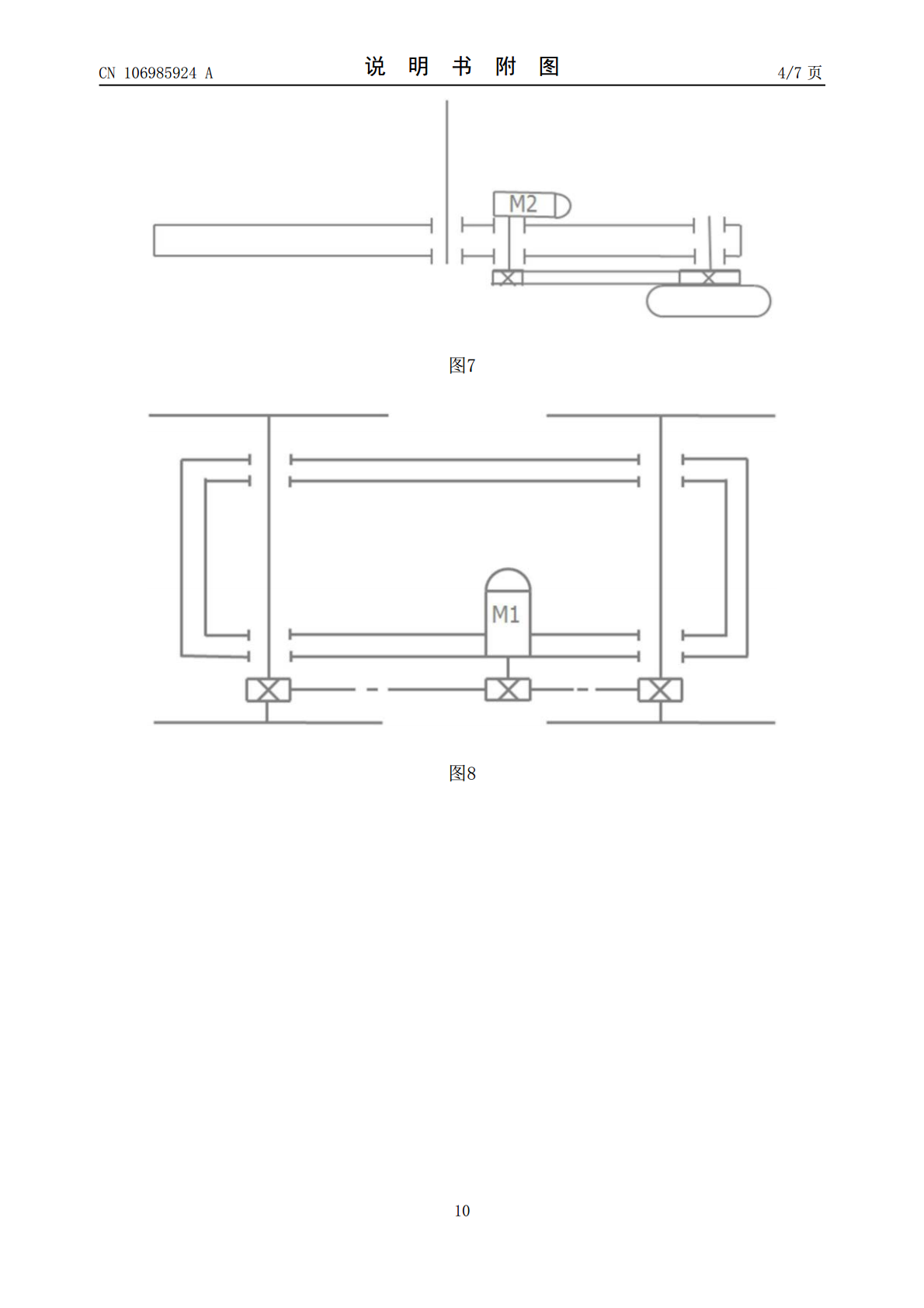
变形多轮式全地形机器人行走机构.pdf
本发明公开了一种变形多轮式全地形机器人行走机构,包括平面轮式行走机构,所述平面轮式行走机构包括机架和四个行走轮,四个行走轮两两为一组分别对称安装在机架的下方,各个行走轮均连接有驱动电机,驱动电机的输出轴通过轴承与行走轮的转轴连接,还包括变形轮式机构和变形支撑机构。本发明通过在平面轮式行走机构的前端设置一个变形轮式机构,来克服传统平面轮式行走机构不能在台阶、楼梯、沟壑和陡坡等复杂地形行走的缺点,具有质量轻、机动性能高、转弯灵活的特点;通过在机架的后端设置变形支撑机构,来进一步进行变形和抬升,使本发明适用于阶

轮爪复合式机器人的行走机构.pdf
轮爪复合式机器人的行走机构,涉及一种水田运输或者种植机械的行走机构,包括车轮和带动车轮行走的驱动机构,在车轮的外侧以轮轴为中心线沿圆周方向对称设有多组爪叶,每两个对称设置的爪叶均连接在爪叶伸缩机构上,所述的爪叶伸缩机构主要由轮爪轴、滑套和连杆组成,轮爪轴的一端通过连接套筒与轮轴相连接,并以定位销固定,轮爪轴另一端悬空,在轮爪轴上套设有滑套,爪叶的一端与轮爪轴以铰链连接,爪叶的中部与连杆的一端呈铰链连接,连杆的另一端与滑套以铰链连接。本装置一方面减少车轮对水稻田土壤的压实,另一方面可以在水稻田中快速行走,使

一种自适应海底复杂地形的复合轮式行走机构.pdf
本发明公开了一种自适应海底复杂地形的复合轮式行走机构,它包括铰接式车架和安装在车架两侧具有独立驱动系统的复合轮系。所述复合轮系由前、后连接板以及安装于前、后连接板上具有独立驱动系统的前轮、中轮和后轮,所述前轮、中轮、后轮之间有链轮,所述链轮通过链条相互传递动力,所述前、后连接板又跟油缸和车架铰接。本发明采用主动控制的方式进行越障,可越过2倍于轮胎直径的台阶、凸台,可跨过小于轮系中前后轮距的壕沟,可适应高低起伏的路面,使轮胎与地面连续接触,最大程度地获得路面附着力,有效的提高在海底复杂路况下的动力性能以及工

用于移动机器人的四轮式行走机构.pdf
本发明公开一种用于移动机器人的四轮式行走机构,包括,电机及驱动轮;还包括,圆弧齿同步轮带装置;所述驱动轮通过圆弧齿同步轮带装置安装于所述电机驱动轴上。本发明所带来的有益效果:本发明具有换向速度快、缓冲间隙小、传动距离精准、损耗低、无噪声和振动危害、启动性能好、节能和经济的优点,并且结构相对简单,安装方便,功能强大,尤其能降低成本。