
一种机器人的轮式行走装置.pdf

一只****生物


1/7

2/7

3/7

4/7

5/7

6/7
7/7
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种机器人的轮式行走装置.pdf
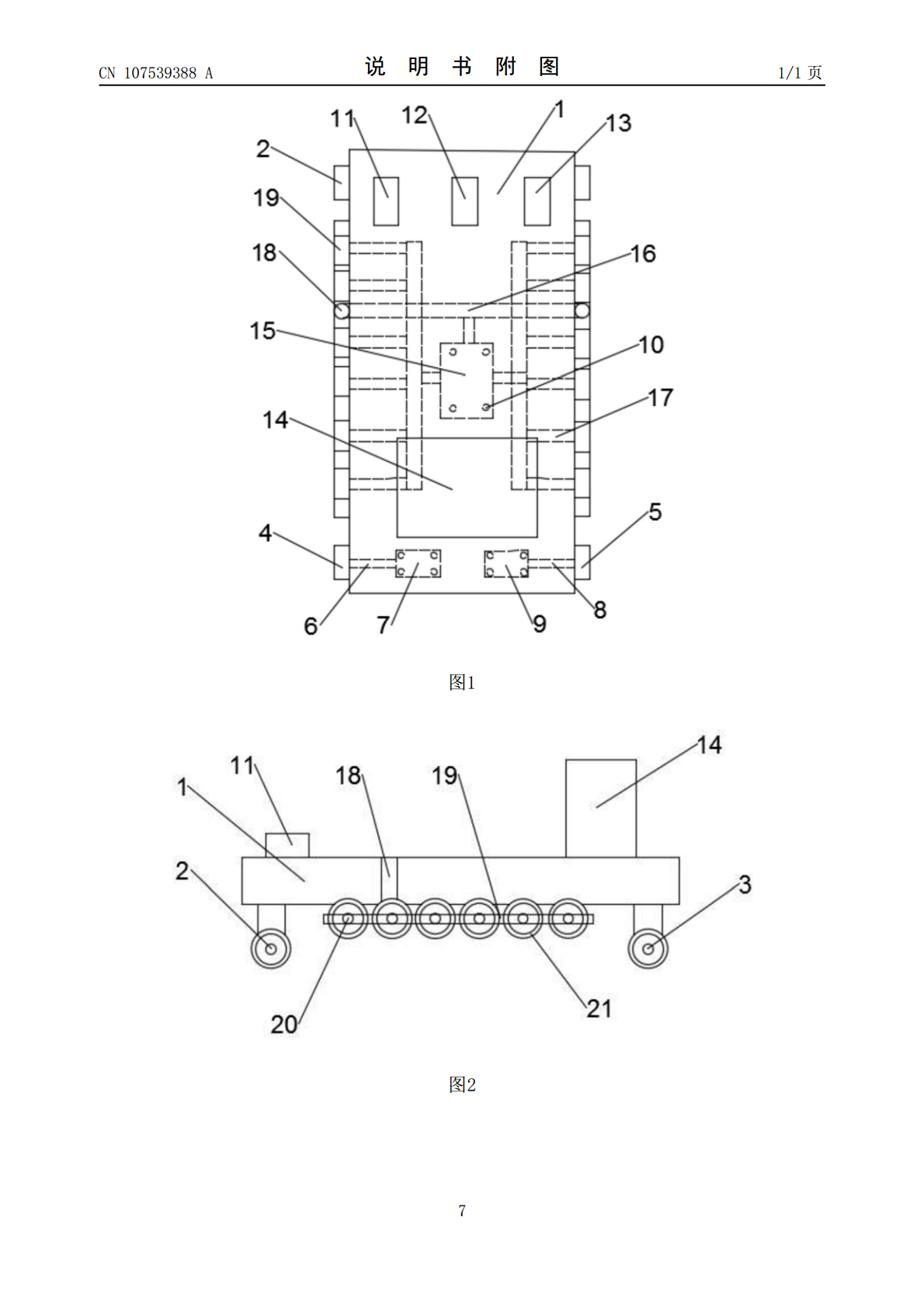
本发明公开了一种机器人的轮式行走装置,包括底盘,底盘前面两侧分别安装万向轮,底盘后面两侧分别安装左后驱动轮和右后驱动轮,左后驱动轮通过左后驱动轴连接左后轮驱动电机,右后驱动轮通过右后驱动轴连接右后轮驱动电机,底盘上表面前侧从左至右依次安装超声测距传感器、倾角传感器和红外避障传感器,底盘的底面中间连接辅助驱动电机,辅助驱动电机连接升降驱动轴和若干个辅助驱动轴,升降驱动轴连接两个升降杆,两个升降杆均一端固定在底盘上,另一端固定连接横向杆,横向杆上均安装若干个辅助驱动轮,辅助驱动轮分别连接在辅助驱动轴上,该装置

机器人行走装置和轮式机器人.pdf
本发明公开了一种机器人行走装置和轮式机器人。该机器人行走装置,包括设置在机器人底盘底部的驱动机构和固定机构;所述驱动机构包括沿所述机器人底盘径向方向依次设置的驱动电机、全向轮、用于连接所述驱动电机的输出轴和所述全向轮的转接轴、以及用于实现所述转接轴与所述驱动电机和所述全向轮固定连接的连接组件;所述固定机构用于将所述驱动电机固定在所述机器人底盘上。该机器人行走装置采用固定机构将驱动机构设置在机器人底盘上,在驱动机构出现故障时,无需拆开机器人底盘即可进行更换,使得驱动机构的后期维护过程更简单方便。
一种轮式行走装置.pdf
本发明公开了一种轮式行走装置,包括承载底盘、滚轮总成、行走转向总成和驱动总成;通过采用两个驱动单元,每个驱动单元对应三个以上的传动件,使得三个以上的传动件运行时的转动角度均与驱动单元的转速相对应,对称设置的主动轮和从动轮避免了某个轮子的对地面的附着力不同而失控,通过主动轮和从动轮的转动不相互干涉所抵消的转速差,提高了动力的传递效率。且同轴设置的转向轴和驱动轴减小了设备的体积,采用了两轮单驱动车轮装置比以往的单轮装置具有更高的稳定性。
一种齿轮式行走装置.pdf
本发明公开一种齿轮式行走装置,包括第一行走齿轮和第二行走齿轮,第一行走齿轮与第二行走齿轮啮合,并且第一行走齿轮可在第二行走齿轮上旋转;第一行走齿轮的侧端连有第一动力电机组件,第一动力电机组件上连有第一撑架,第一撑架与第二行走齿轮的侧端连接;所述第一行走齿轮和第二行走齿轮均有两个,两个第一行走齿轮之间连接有第一同步连杆,两个第二行走齿轮之间连接有第二同步连杆;第一同步连杆穿过第一动力电机组件的前部,并且第一同步连杆与第一动力电机组件内的旋转轴相连。该行走机构中的两个行走齿轮啮合,行走更稳定,结构简单新颖。

一种轮式行走机器人行走阻力平衡调节系统.pdf
本发明公开了一种轮式行走机器人行走阻力平衡调节系统,涉及机器人调节控制系统领域。本发明中:行走机器人本体上装设有陀螺仪,行走机器人的传动机构上装设有速度传感器,行走机器人的传动机构与相应的动力电机连接;行走阻力调节系统内设有陀螺仪监测单元、速率传感监测单元和电机驱动单元;行走阻力调节系统内设置有摩擦阻力平衡调节单元;行走阻力调节系统内设有数据信息存储单元和数据信息分析单元。本发明通过陀螺仪对机器人行走的路面坡度角度进行实时监测,通过速度传感器对行走机器人的行走速率进行实时监测,通过速率对比方式进行速率变化