
实时车身高度测量.pdf

明钰****甜甜

1/10
2/10
3/10
4/10
5/10
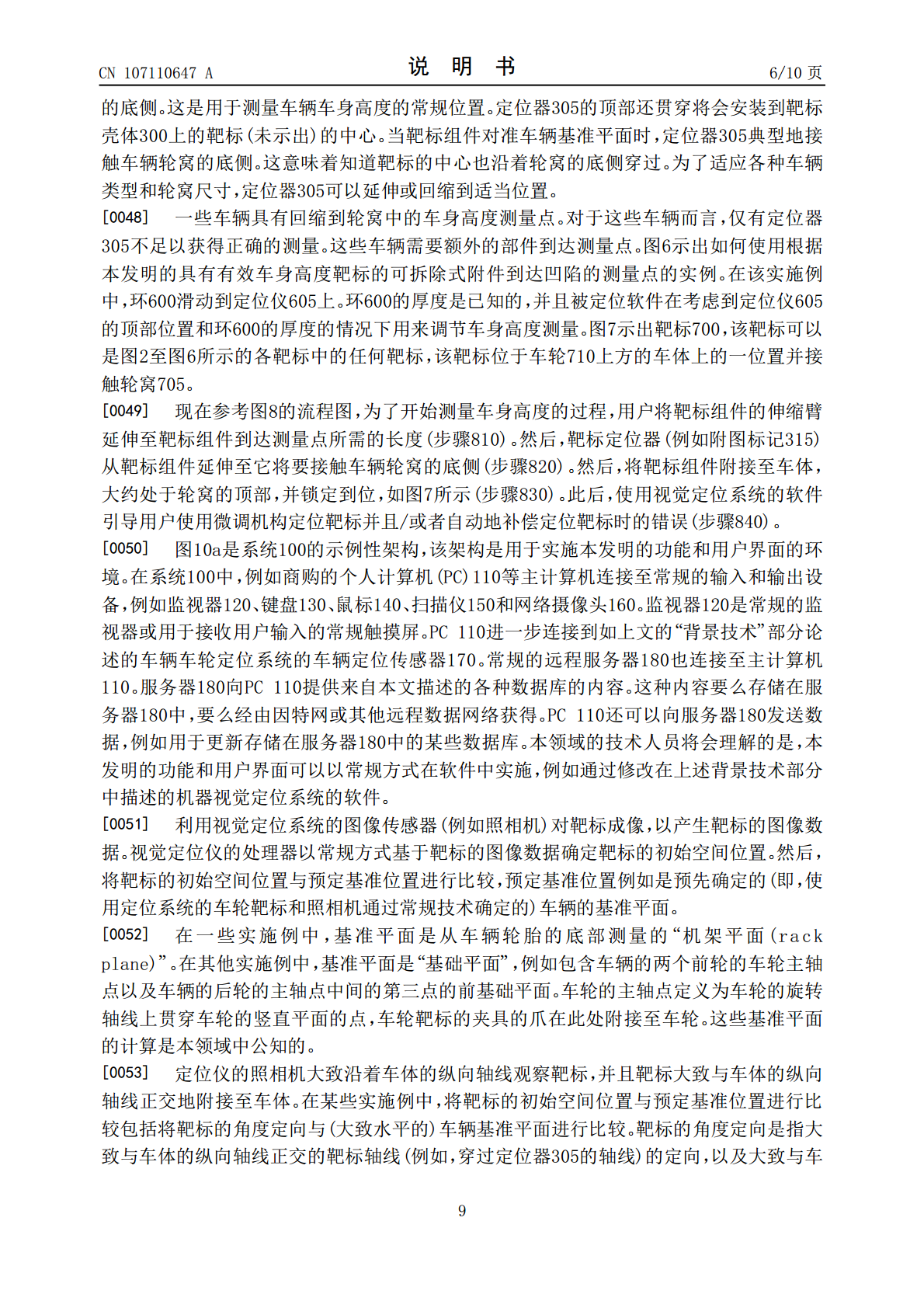
6/10
7/10
8/10
9/10
10/10
亲,该文档总共26页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
实时车身高度测量.pdf
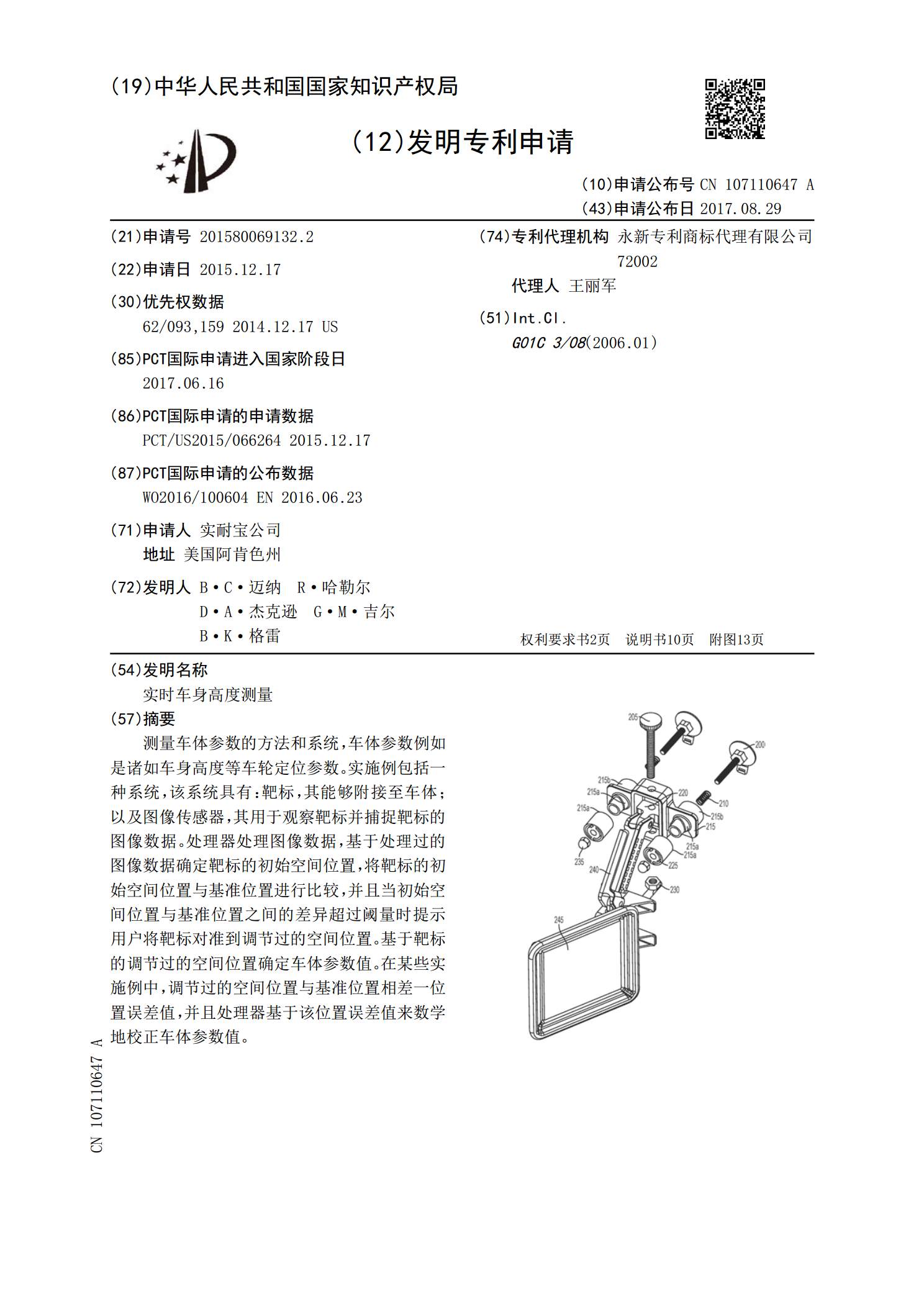
测量车体参数的方法和系统,车体参数例如是诸如车身高度等车轮定位参数。实施例包括一种系统,该系统具有:靶标,其能够附接至车体;以及图像传感器,其用于观察靶标并捕捉靶标的图像数据。处理器处理图像数据,基于处理过的图像数据确定靶标的初始空间位置,将靶标的初始空间位置与基准位置进行比较,并且当初始空间位置与基准位置之间的差异超过阈量时提示用户将靶标对准到调节过的空间位置。基于靶标的调节过的空间位置确定车体参数值。在某些实施例中,调节过的空间位置与基准位置相差一位置误差值,并且处理器基于该位置误差值来数学地校正车体

车身高度自动测量调整装置.pdf
车身高度自动测量调整装置,其包括:基体支架、车辆引导支架、测量位置支架、调整装置、测量装置和车轮限位装置;基体支架上设有车辆引导支架,测量位置支架固定于基体支架上,调整装置固定于基体上,测量装置固定于基体上,车轮限位装置设于测量位置支架上;解决了面包车身测量只能靠人工来完成的弊端,实现了自动化测量调整,减轻了劳动强度,提高了调整精度和装配效率并且具有操作简便,精度高,省时省力的优点。
车身高度测量装置及车辆配重快速测量方法.pdf
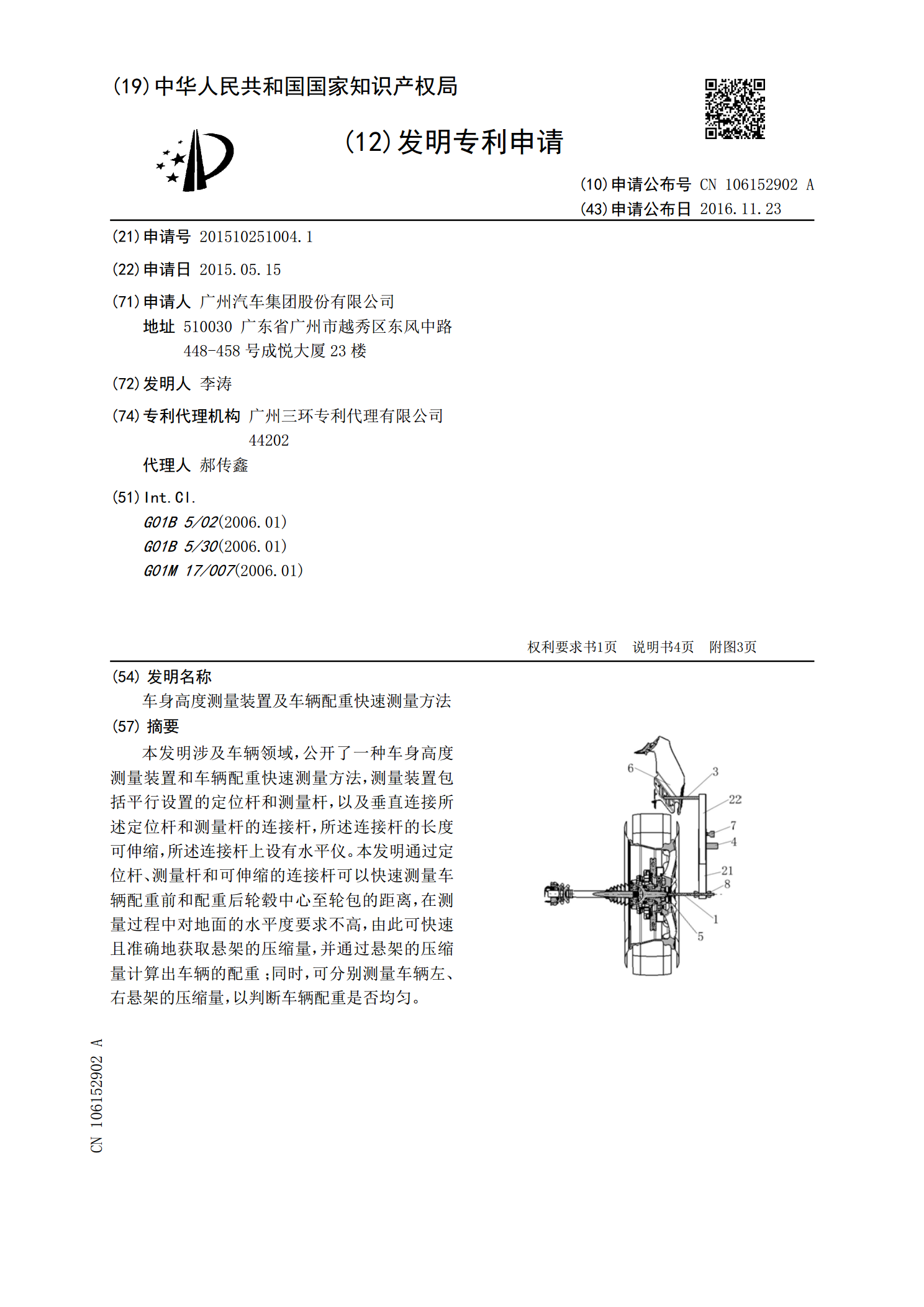
本发明涉及车辆领域,公开了一种车身高度测量装置和车辆配重快速测量方法,测量装置包括平行设置的定位杆和测量杆,以及垂直连接所述定位杆和测量杆的连接杆,所述连接杆的长度可伸缩,所述连接杆上设有水平仪。本发明通过定位杆、测量杆和可伸缩的连接杆可以快速测量车辆配重前和配重后轮毂中心至轮包的距离,在测量过程中对地面的水平度要求不高,由此可快速且准确地获取悬架的压缩量,并通过悬架的压缩量计算出车辆的配重;同时,可分别测量车辆左、右悬架的压缩量,以判断车辆配重是否均匀。
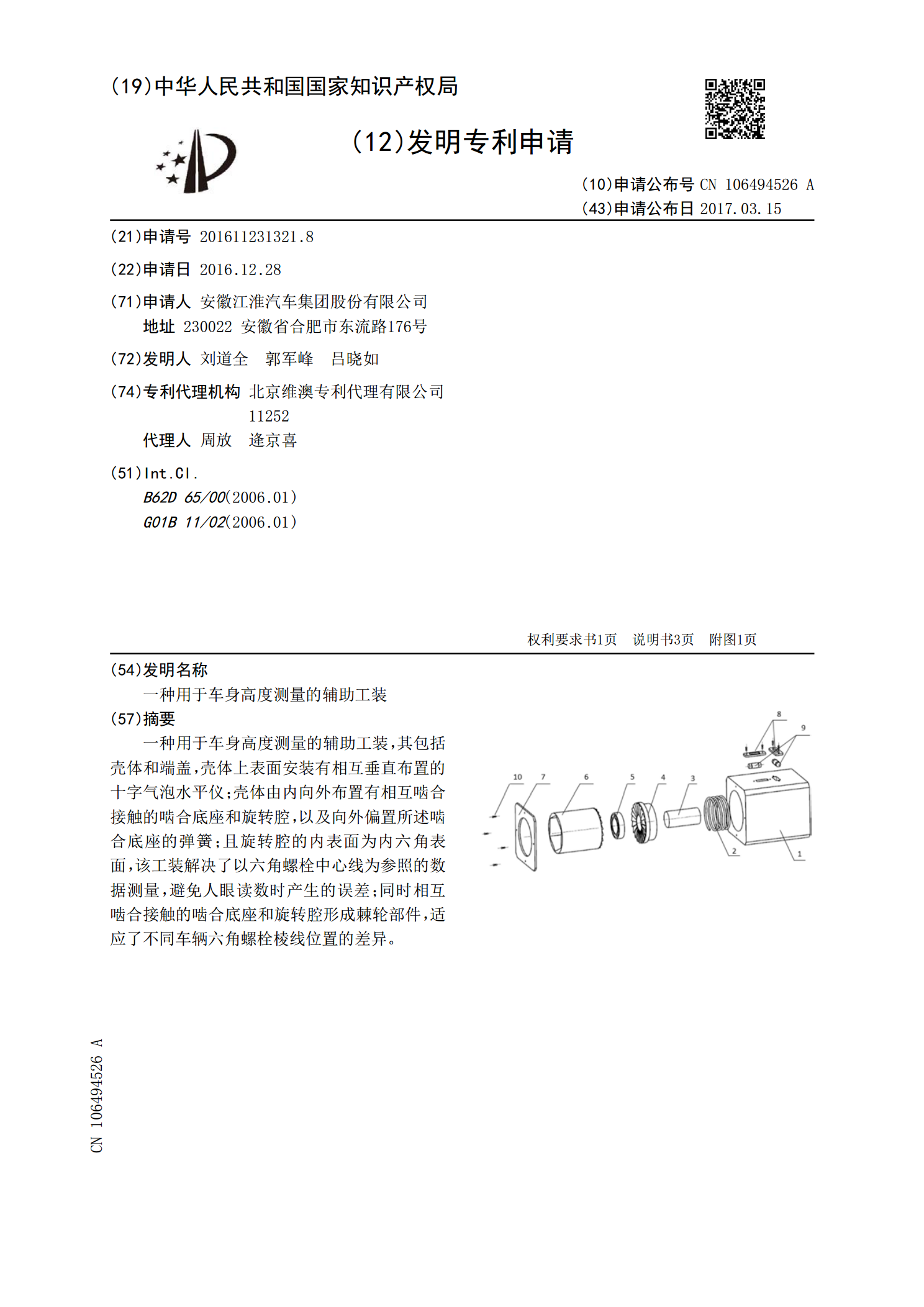
一种用于车身高度测量的辅助工装.pdf
一种用于车身高度测量的辅助工装,其包括壳体和端盖,壳体上表面安装有相互垂直布置的十字气泡水平仪;壳体由内向外布置有相互啮合接触的啮合底座和旋转腔,以及向外偏置所述啮合底座的弹簧;且旋转腔的内表面为内六角表面,该工装解决了以六角螺栓中心线为参照的数据测量,避免人眼读数时产生的误差;同时相互啮合接触的啮合底座和旋转腔形成棘轮部件,适应了不同车辆六角螺栓棱线位置的差异。
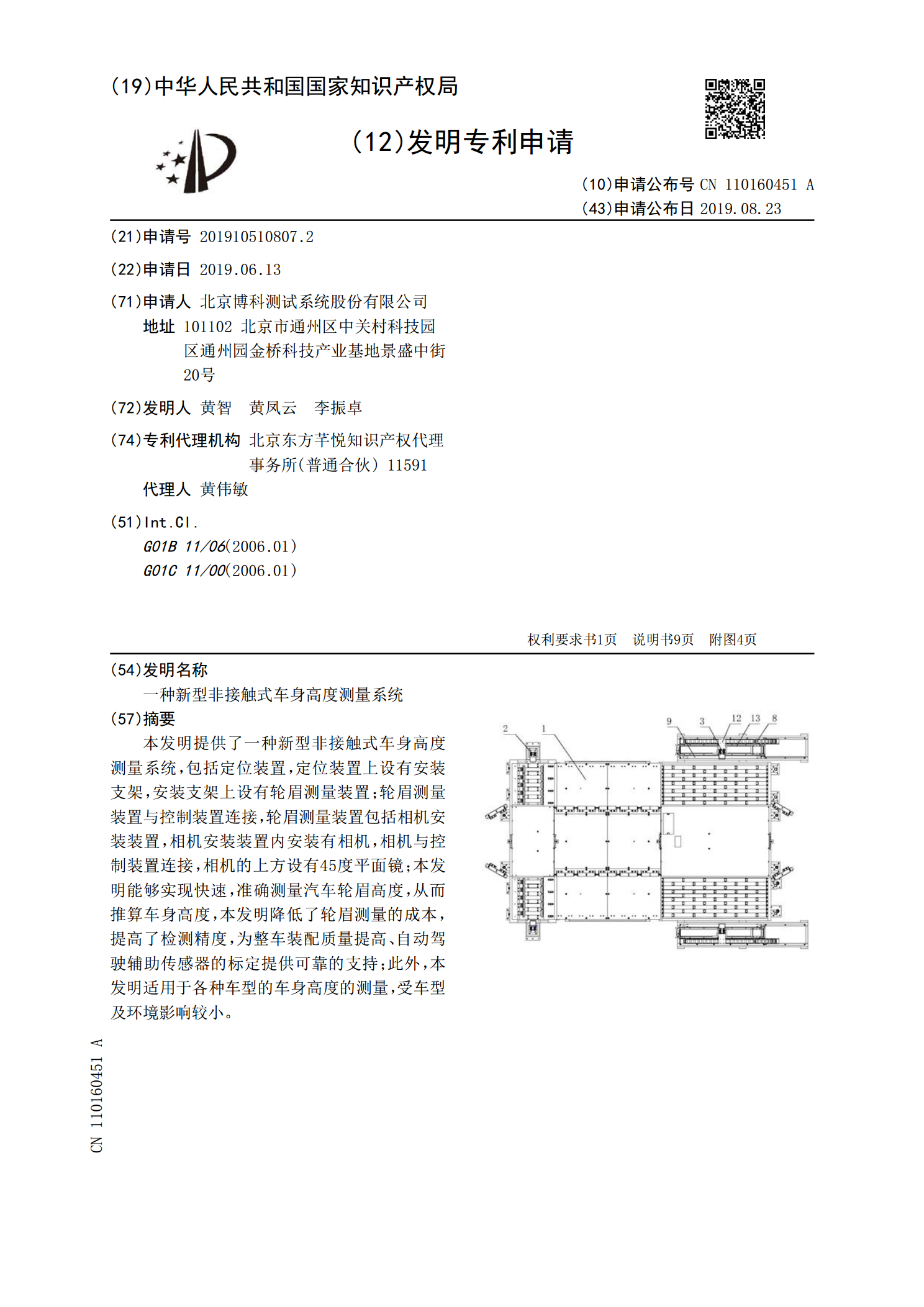
一种新型非接触式车身高度测量系统.pdf
本发明提供了一种新型非接触式车身高度测量系统,包括定位装置,定位装置上设有安装支架,安装支架上设有轮眉测量装置;轮眉测量装置与控制装置连接,轮眉测量装置包括相机安装装置,相机安装装置内安装有相机,相机与控制装置连接,相机的上方设有45度平面镜;本发明能够实现快速,准确测量汽车轮眉高度,从而推算车身高度,本发明降低了轮眉测量的成本,提高了检测精度,为整车装配质量提高、自动驾驶辅助传感器的标定提供可靠的支持;此外,本发明适用于各种车型的车身高度的测量,受车型及环境影响较小。