
一种基于机器人上下料的码垛设备.pdf

绮兰****文章

1/6
2/6
3/6

4/6
5/6
6/6
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种基于机器人上下料的码垛设备.pdf
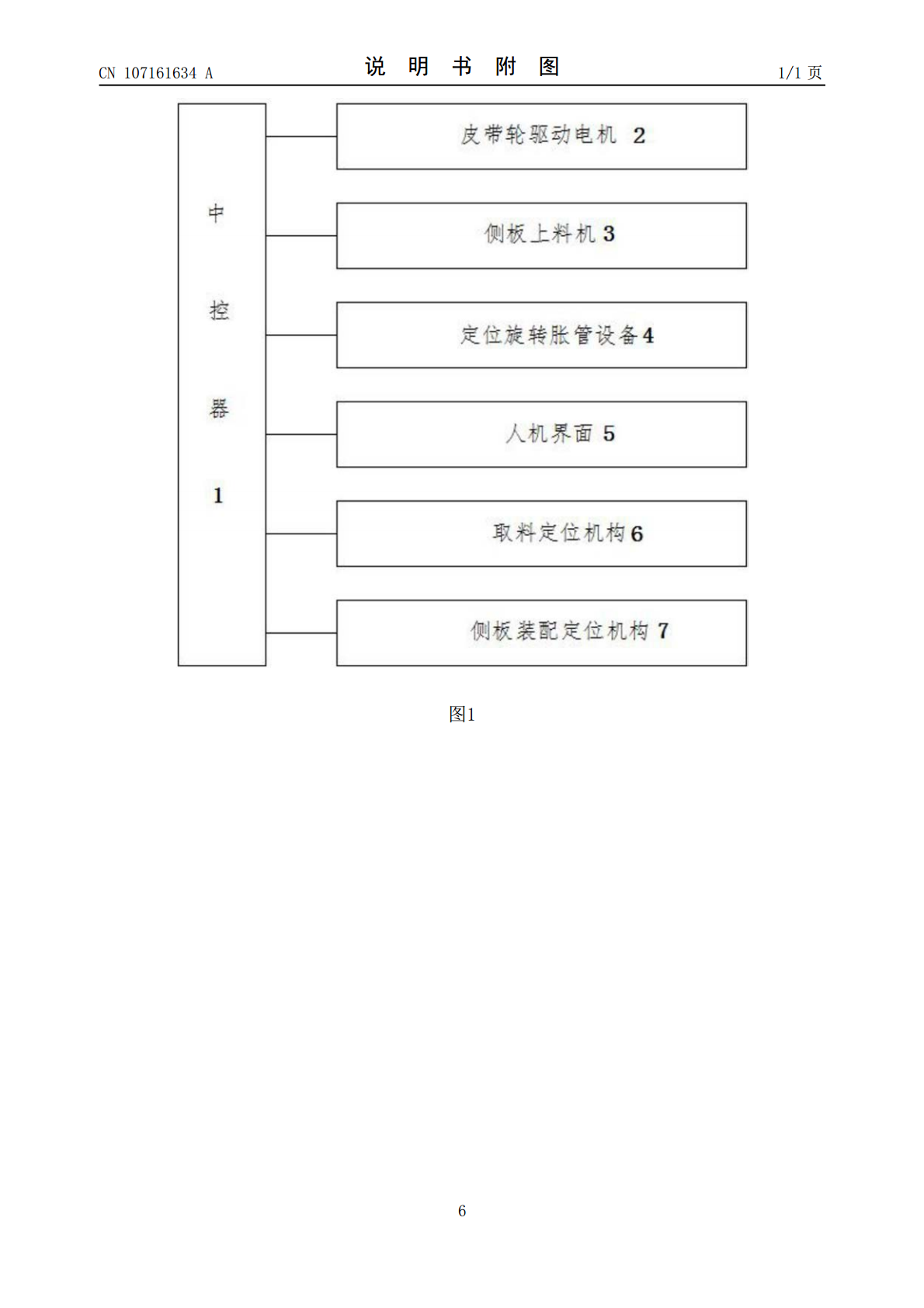
本发明涉及码垛设备领域,具体涉及一种基于机器人上下料的码垛设备,包括人工上料工作台、输送机构、侧板上料机、定位旋转胀管设备、带有机械臂的机器人以及带有中控器的控制器。人工装管后将装有管体的主板放入输送机构,输送机构包括壳体、固定在壳体两端的皮带轮和皮带轮驱动电机、连接两端皮带轮的输送带、固定于壳体顶端的机器人取料定位机构以及固定于壳体外侧的侧板装配定位机构。中控器分别电性连接皮带轮驱动电机、侧板上料机、定位旋转胀管设备、人机界面、取料定位机构以及侧板装配定位机构。本发明通过自动化设备进行上料下料以及码垛的
一种下料码垛夹具.pdf
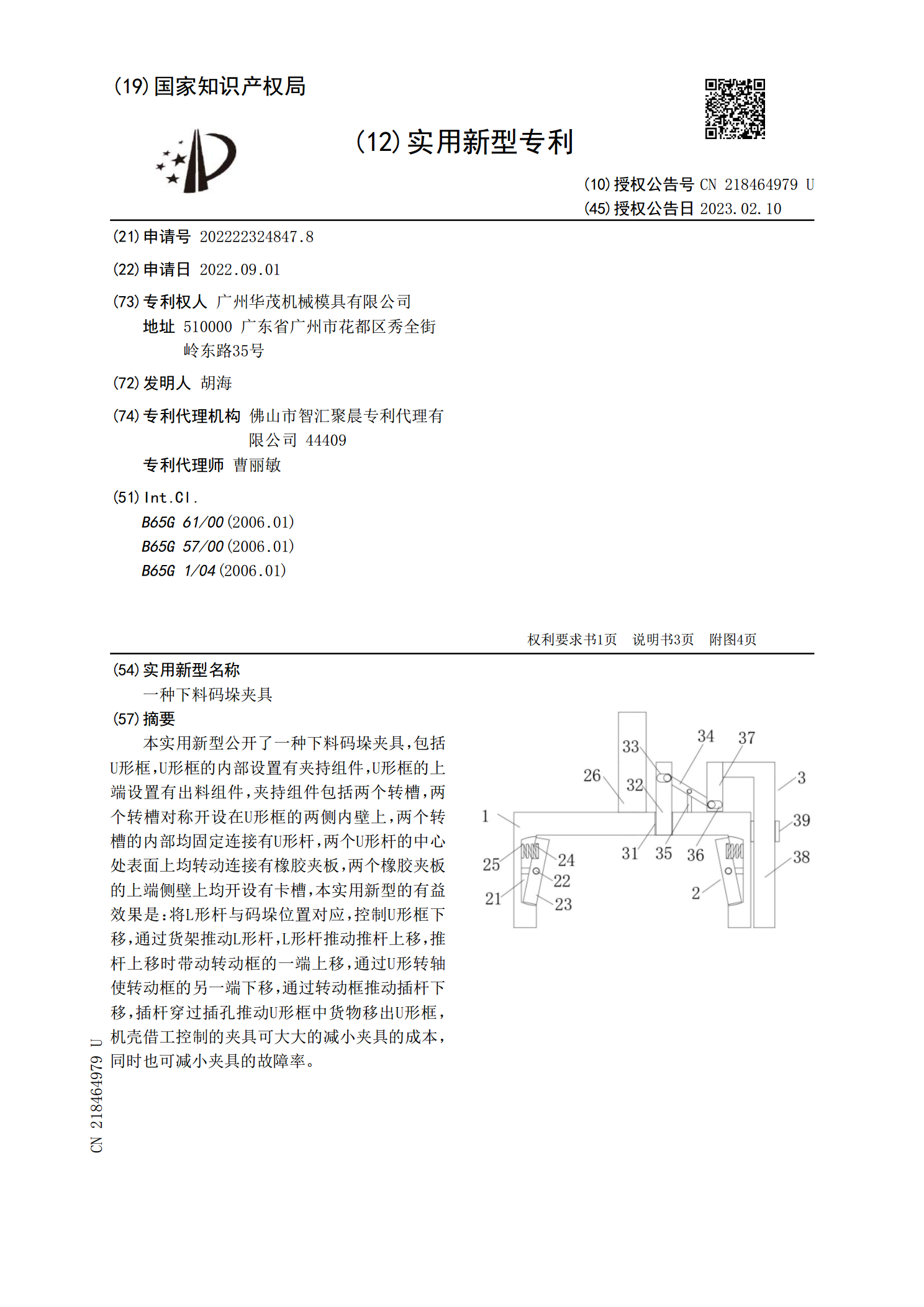
本实用新型公开了一种下料码垛夹具,包括U形框,U形框的内部设置有夹持组件,U形框的上端设置有出料组件,夹持组件包括两个转槽,两个转槽对称开设在U形框的两侧内壁上,两个转槽的内部均固定连接有U形杆,两个U形杆的中心处表面上均转动连接有橡胶夹板,两个橡胶夹板的上端侧壁上均开设有卡槽,本实用新型的有益效果是:将L形杆与码垛位置对应,控制U形框下移,通过货架推动L形杆,L形杆推动推杆上移,推杆上移时带动转动框的一端上移,通过U形转轴使转动框的另一端下移,通过转动框推动插杆下移,插杆穿过插孔推动U形框中货物移出U形

一种基于激光开槽机器人上下料设备.pdf
本发明公布了一种基于激光开槽机器人上下料设备,它包括桌体、激光切割模块、保护外罩、控制模块和固定驱动模块,所述固定驱动模块的伺服电机设置在桌体内的左侧面板上,所述伺服电机上设置有皮带轮;所述皮带轮上设置有皮带,皮带并与固定杆上皮带轮连接;所述固定杆设置在左支撑架上;所述固定杆一端设置有套筒;所述在左支撑架右侧设置右支撑架;所述右支撑架上设置有顶杆和顶紧气缸;所述顶杆与顶紧气缸通过固定块连接;所述左支撑架和右支撑架共中心面形式设置在桌面上。它集成了工业机器人的应用和激光切削方式,提高的切削精度和稳定性;同时
一种铝模板下料码垛系统.pdf
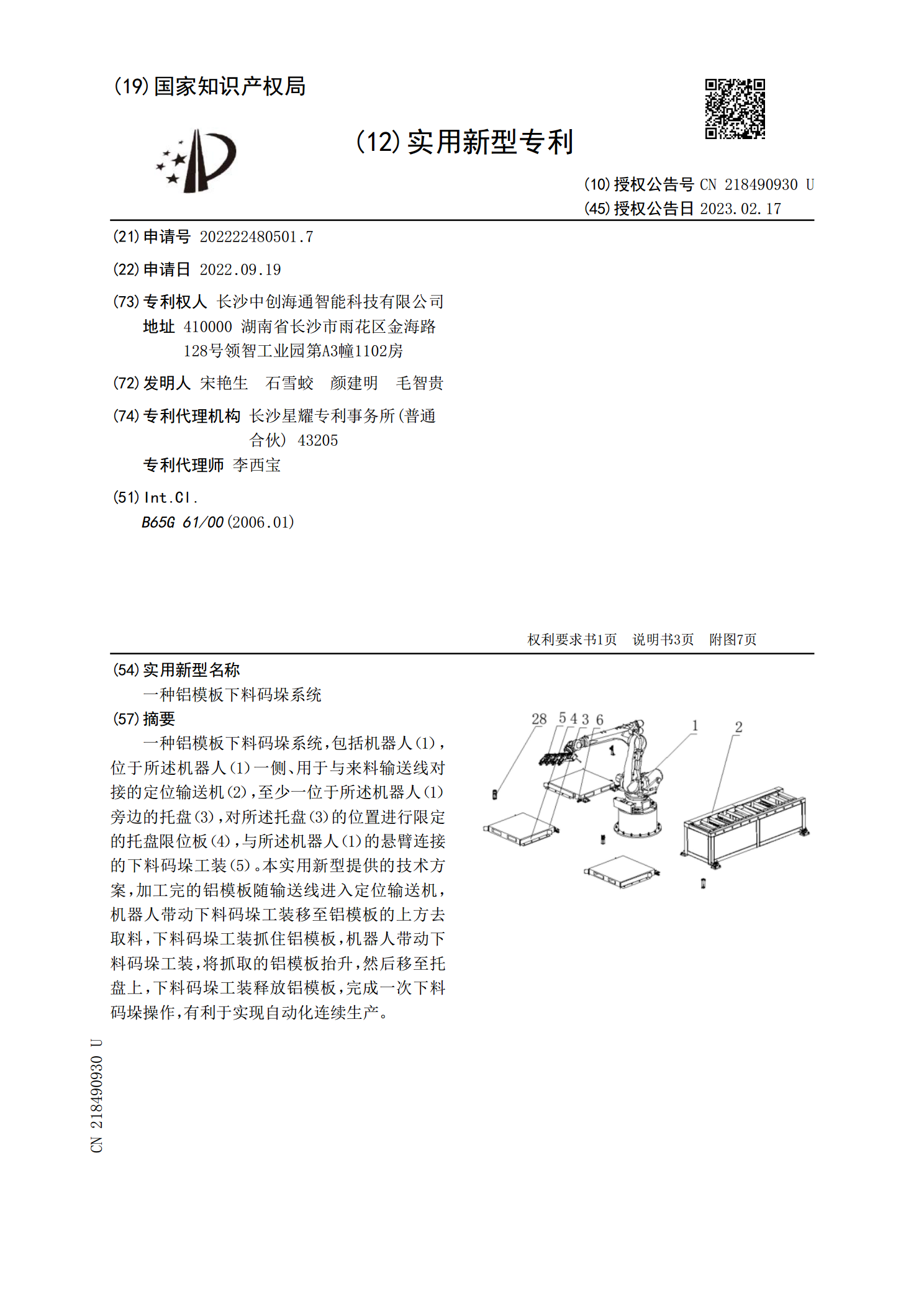
一种铝模板下料码垛系统,包括机器人(1),位于所述机器人(1)一侧、用于与来料输送线对接的定位输送机(2),至少一位于所述机器人(1)旁边的托盘(3),对所述托盘(3)的位置进行限定的托盘限位板(4),与所述机器人(1)的悬臂连接的下料码垛工装(5)。本实用新型提供的技术方案,加工完的铝模板随输送线进入定位输送机,机器人带动下料码垛工装移至铝模板的上方去取料,下料码垛工装抓住铝模板,机器人带动下料码垛工装,将抓取的铝模板抬升,然后移至托盘上,下料码垛工装释放铝模板,完成一次下料码垛操作,有利于实现自动化连
一种码垛机器人的控制方法及码垛机器人.pdf
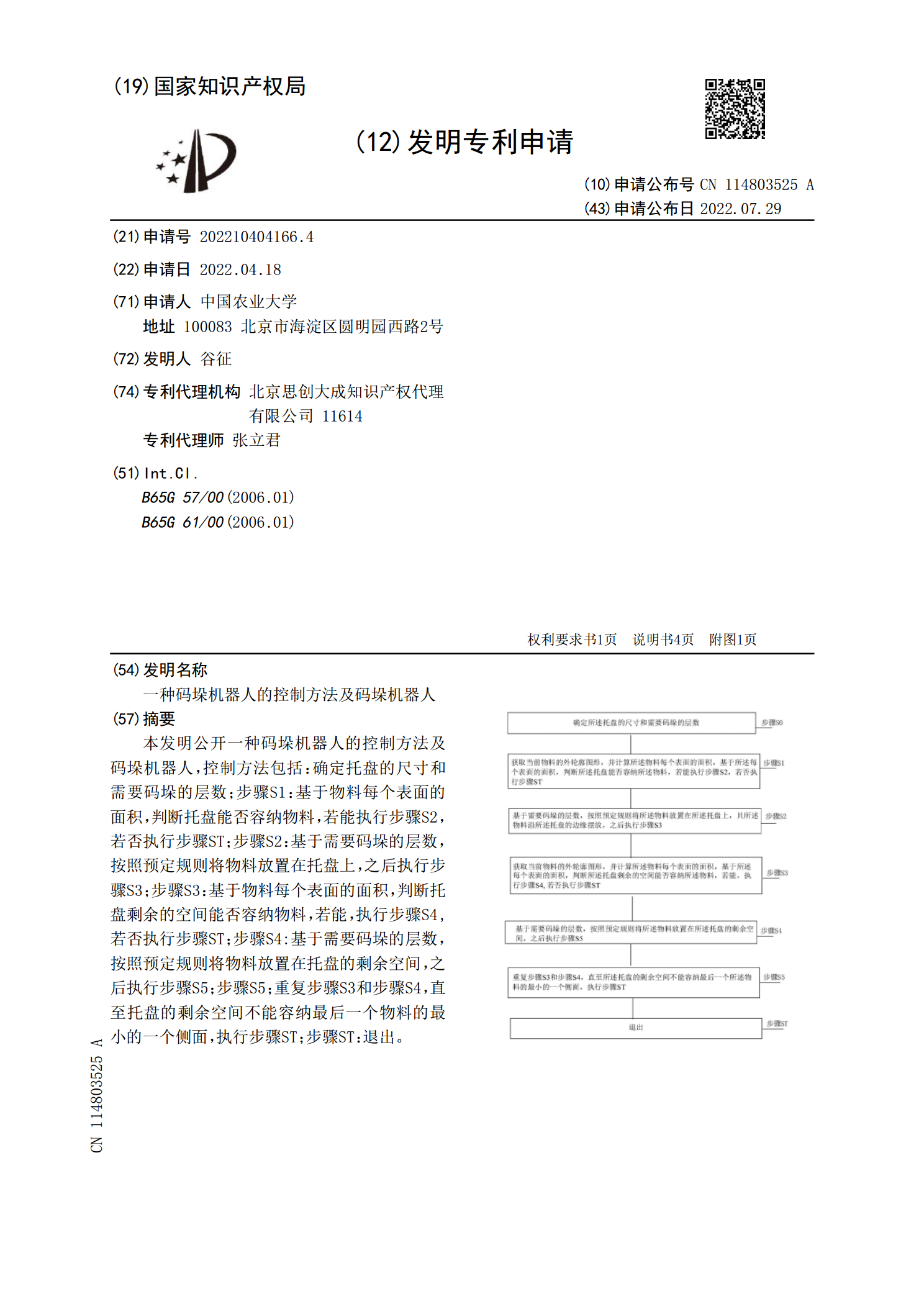
本发明公开一种码垛机器人的控制方法及码垛机器人,控制方法包括:确定托盘的尺寸和需要码垛的层数;步骤S1:基于物料每个表面的面积,判断托盘能否容纳物料,若能执行步骤S2,若否执行步骤ST;步骤S2:基于需要码垛的层数,按照预定规则将物料放置在托盘上,之后执行步骤S3;步骤S3:基于物料每个表面的面积,判断托盘剩余的空间能否容纳物料,若能,执行步骤S4,若否执行步骤ST;步骤S4:基于需要码垛的层数,按照预定规则将物料放置在托盘的剩余空间,之后执行步骤S5;步骤S5;重复步骤S3和步骤S4,直至托盘的剩余空间