
一种码垛机器人的控制方法及码垛机器人.pdf

努力****弘毅

1/7
2/7
3/7
4/7

5/7
6/7
7/7
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种码垛机器人的控制方法及码垛机器人.pdf
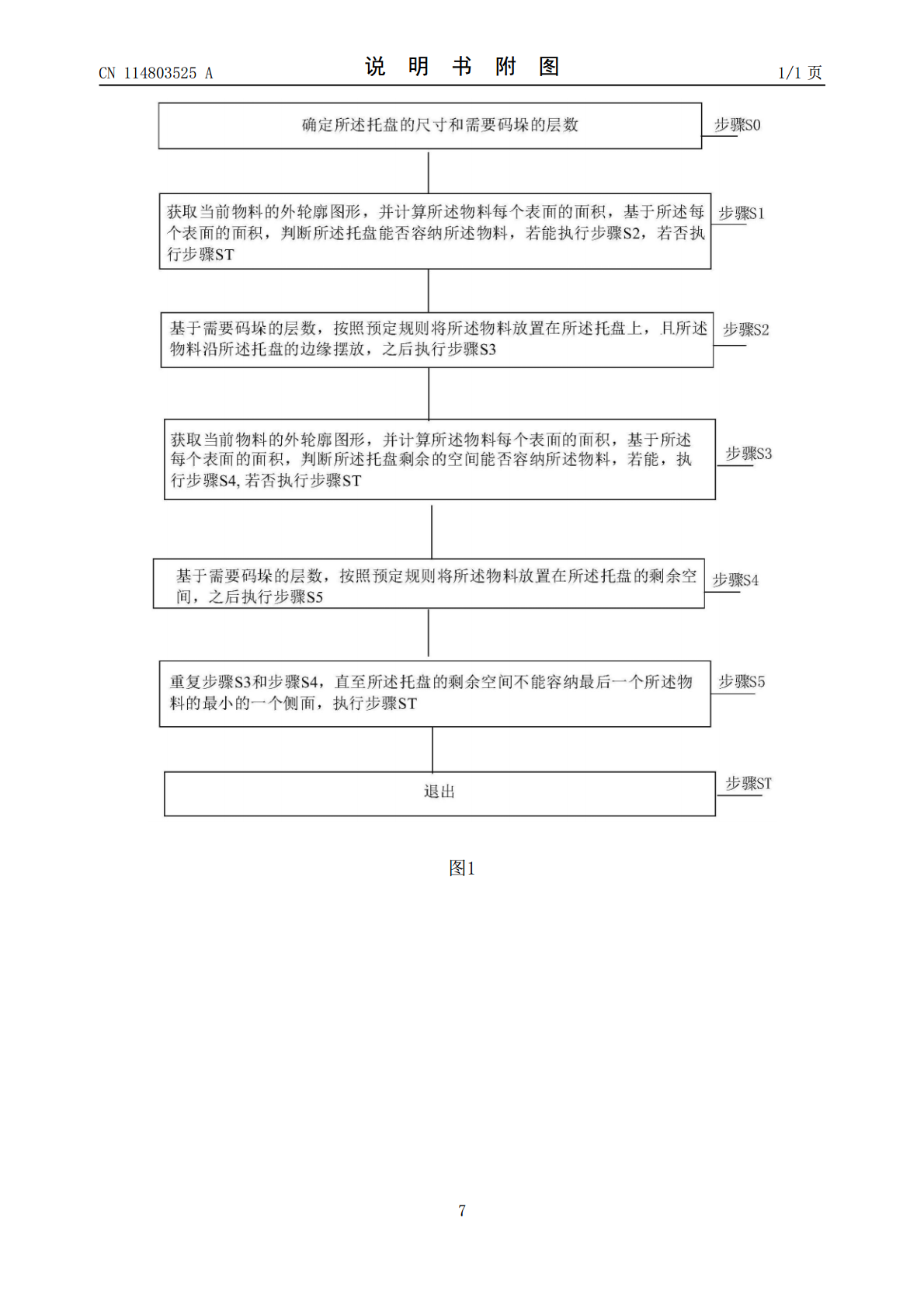
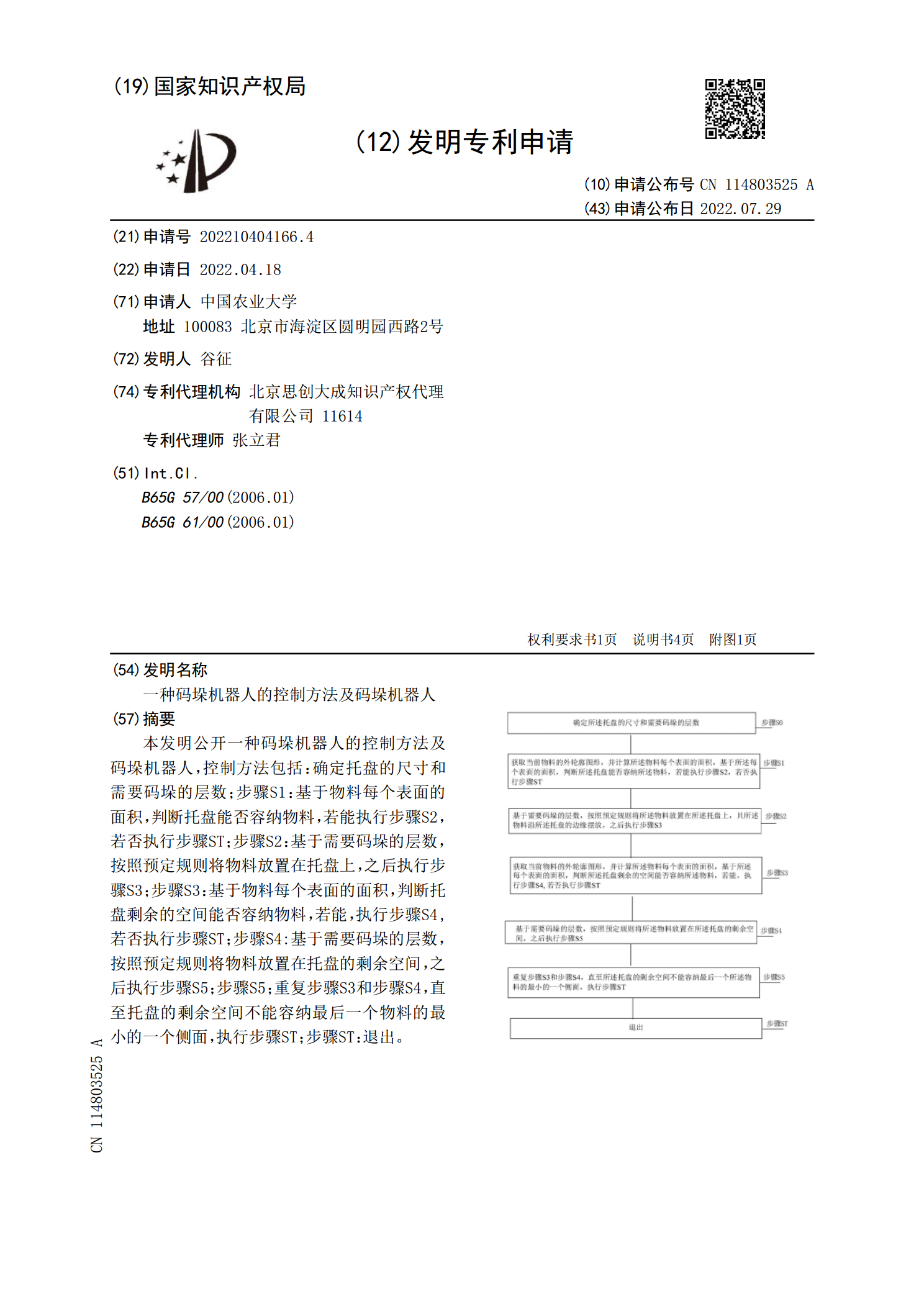
本发明公开一种码垛机器人的控制方法及码垛机器人,控制方法包括:确定托盘的尺寸和需要码垛的层数;步骤S1:基于物料每个表面的面积,判断托盘能否容纳物料,若能执行步骤S2,若否执行步骤ST;步骤S2:基于需要码垛的层数,按照预定规则将物料放置在托盘上,之后执行步骤S3;步骤S3:基于物料每个表面的面积,判断托盘剩余的空间能否容纳物料,若能,执行步骤S4,若否执行步骤ST;步骤S4:基于需要码垛的层数,按照预定规则将物料放置在托盘的剩余空间,之后执行步骤S5;步骤S5;重复步骤S3和步骤S4,直至托盘的剩余空间

一种物料码垛控制机器人及码垛方法.pdf
本发明公开一种物料码垛控制机器人及码垛方法,涉及码垛机器人相关技术领域,包括支杆和滑行轨道,支杆的底端固定有设备舱,支杆的顶端与滑行轨道滑动连接,支杆的顶端为T字型结构,支杆T字型结构的端部通过行进齿轮与滑行轨道连接,设备舱的内部滑动安装有力杆,力杆的底端通过定向槽滑动安装有伸缩杆,伸缩杆的底端固定有夹板,夹板的侧面通过活动孔插接有活动杆,设备舱的内部通过升降机构与力杆连接,升降机构内部的动力电机以及为行进齿轮提供动力的电机的输入端均通过导线连接有逻辑控制器,杆与力杆所在方向于竖直方向齐平。通过以上各装置
码垛货运机器人及码垛方法.pdf
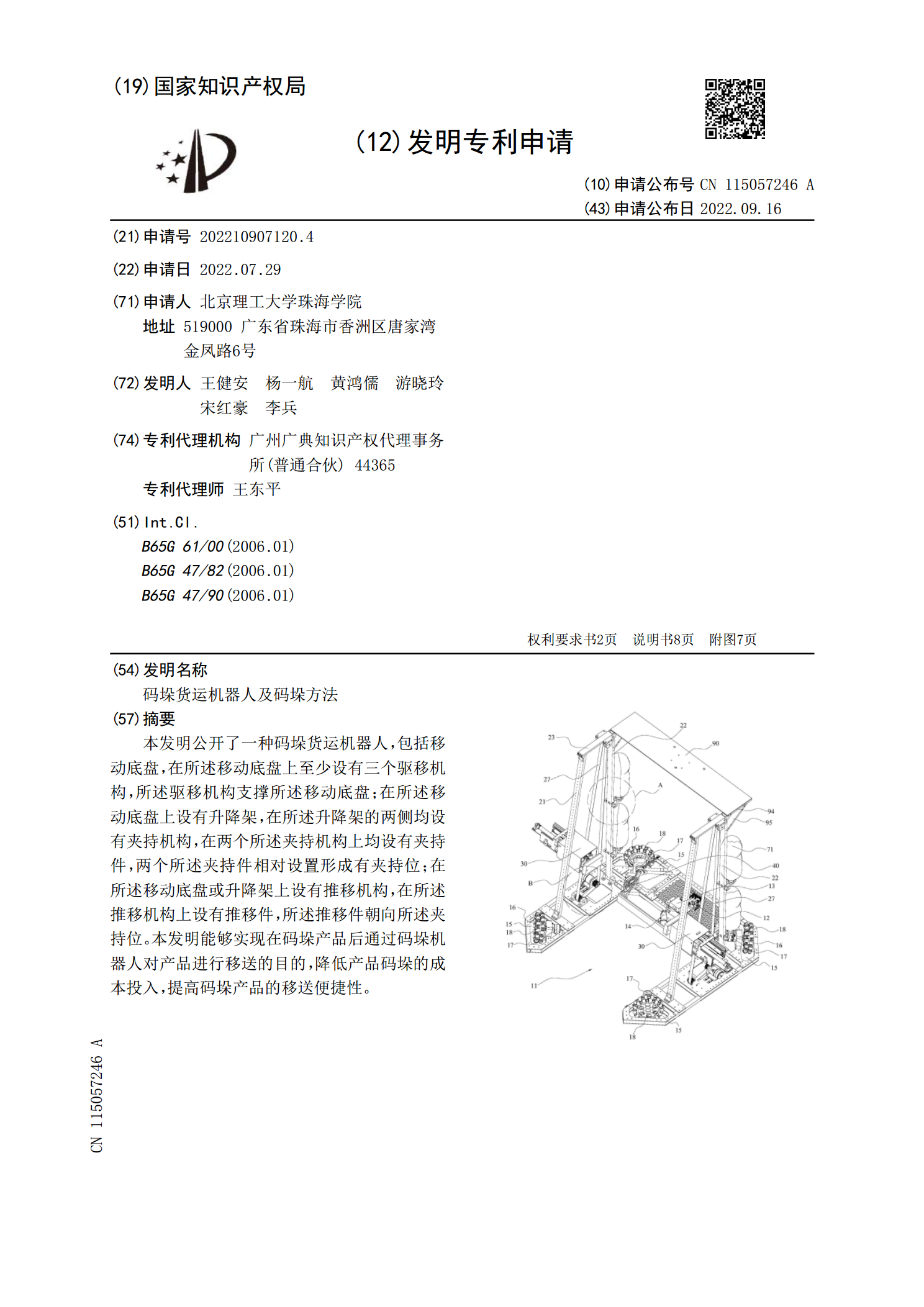
本发明公开了一种码垛货运机器人,包括移动底盘,在所述移动底盘上至少设有三个驱移机构,所述驱移机构支撑所述移动底盘;在所述移动底盘上设有升降架,在所述升降架的两侧均设有夹持机构,在两个所述夹持机构上均设有夹持件,两个所述夹持件相对设置形成有夹持位;在所述移动底盘或升降架上设有推移机构,在所述推移机构上设有推移件,所述推移件朝向所述夹持位。本发明能够实现在码垛产品后通过码垛机器人对产品进行移送的目的,降低产品码垛的成本投入,提高码垛产品的移送便捷性。
一种码垛机器人及其控制方法.pdf
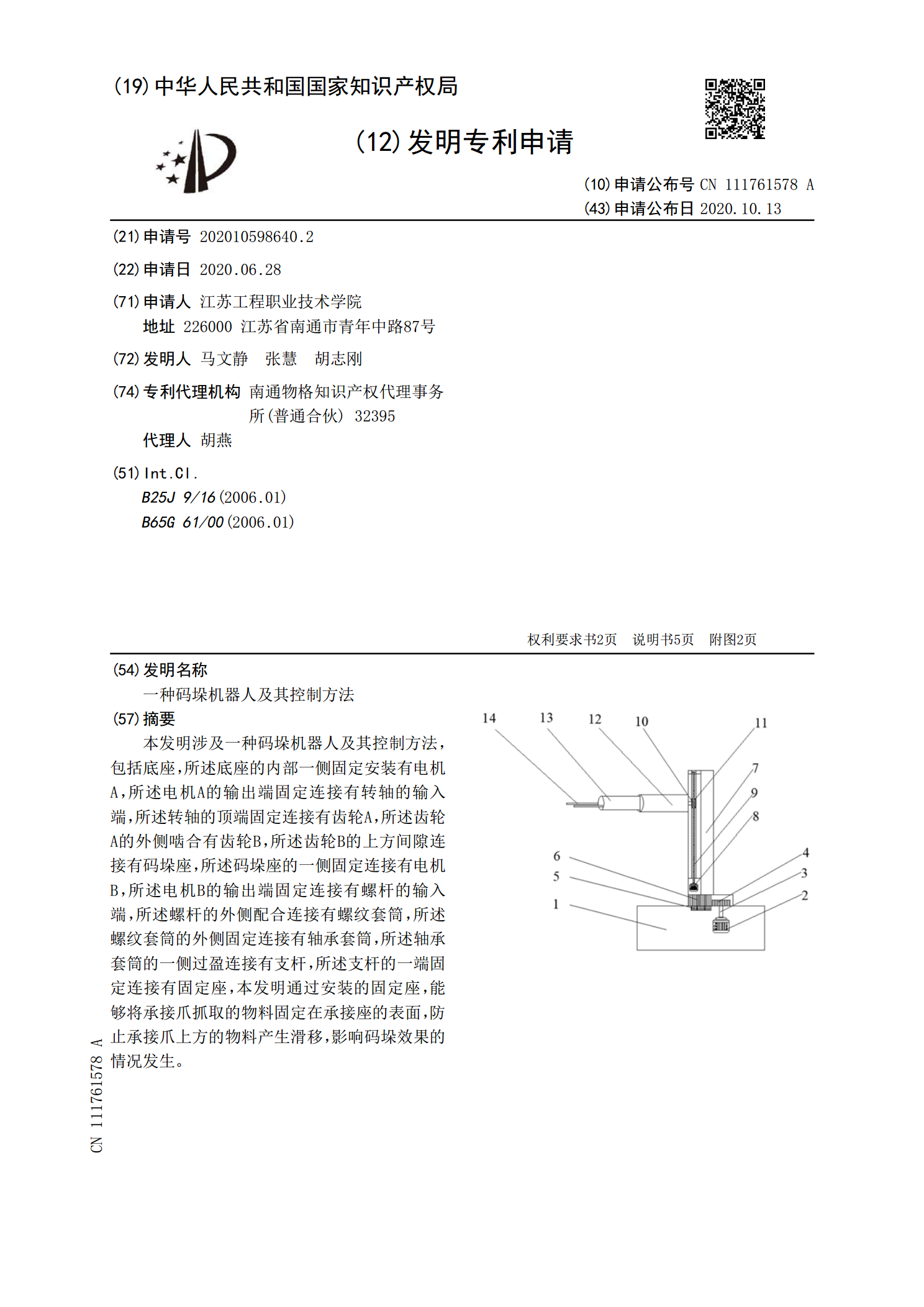
本发明涉及一种码垛机器人及其控制方法,包括底座,所述底座的内部一侧固定安装有电机A,所述电机A的输出端固定连接有转轴的输入端,所述转轴的顶端固定连接有齿轮A,所述齿轮A的外侧啮合有齿轮B,所述齿轮B的上方间隙连接有码垛座,所述码垛座的一侧固定连接有电机B,所述电机B的输出端固定连接有螺杆的输入端,所述螺杆的外侧配合连接有螺纹套筒,所述螺纹套筒的外侧固定连接有轴承套筒,所述轴承套筒的一侧过盈连接有支杆,所述支杆的一端固定连接有固定座,本发明通过安装的固定座,能够将承接爪抓取的物料固定在承接座的表面,防止承接

一种码垛机器人.pdf
一种码垛机器人,由夹持装置、夹头旋转装置、平衡起升装置和机架旋转装置四部分组成。所述的夹持装置由两组气缸、导向杆和夹板组成,其中一组气缸对砖坯进行夹紧,另一组气缸控制砖坯间距。所述的夹头旋转装置由伺服电机带动齿轮旋转,从而控制夹头整体转过的角度。减轻砖瓦生产线上工人的劳动强度,提高砖的烧制质量。