
一种用于柔性机器人的永磁变刚度驱动模块.pdf

听云****君哇

1/7
2/7
3/7
4/7
5/7
6/7
7/7
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种用于柔性机器人的永磁变刚度驱动模块.pdf
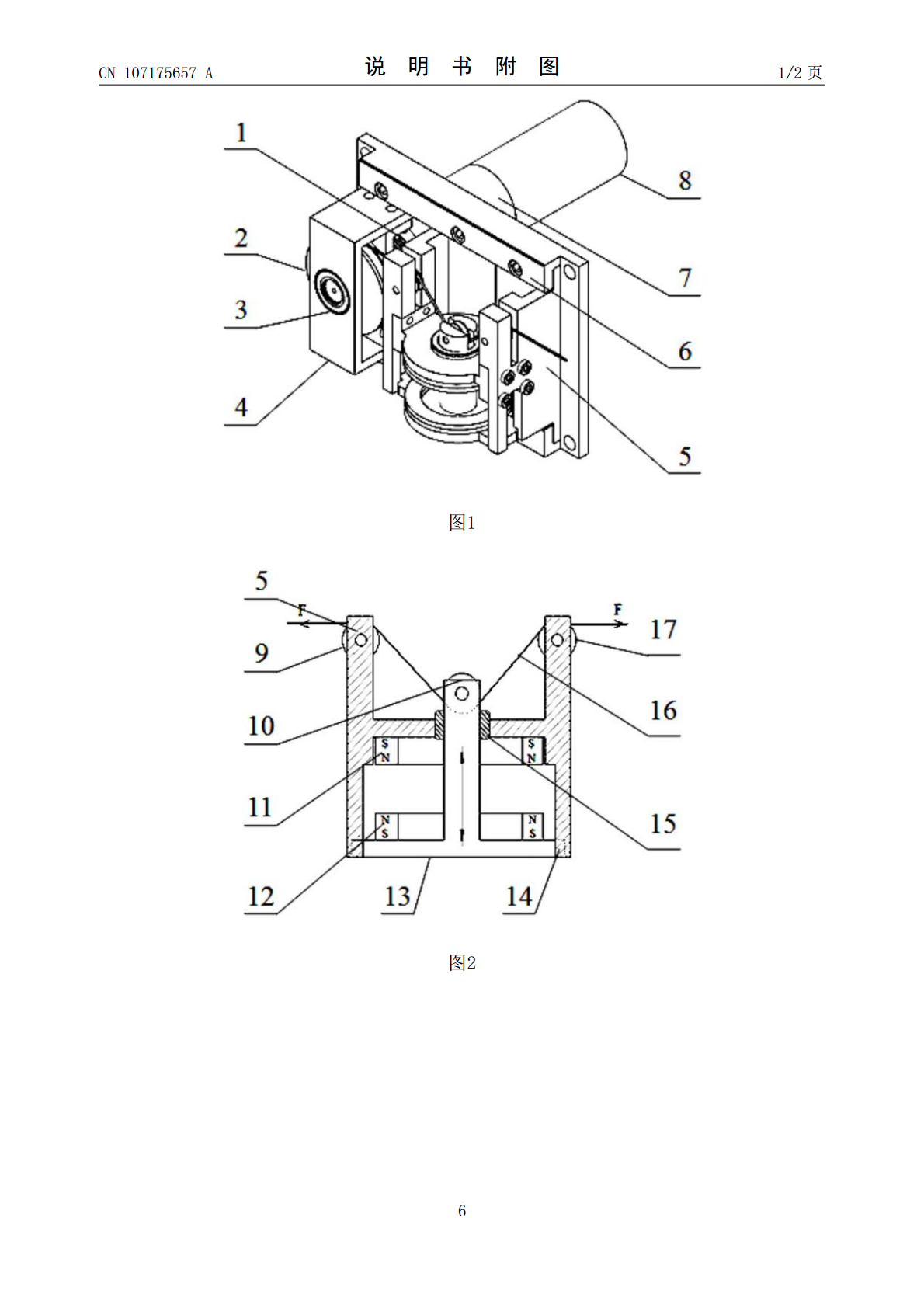
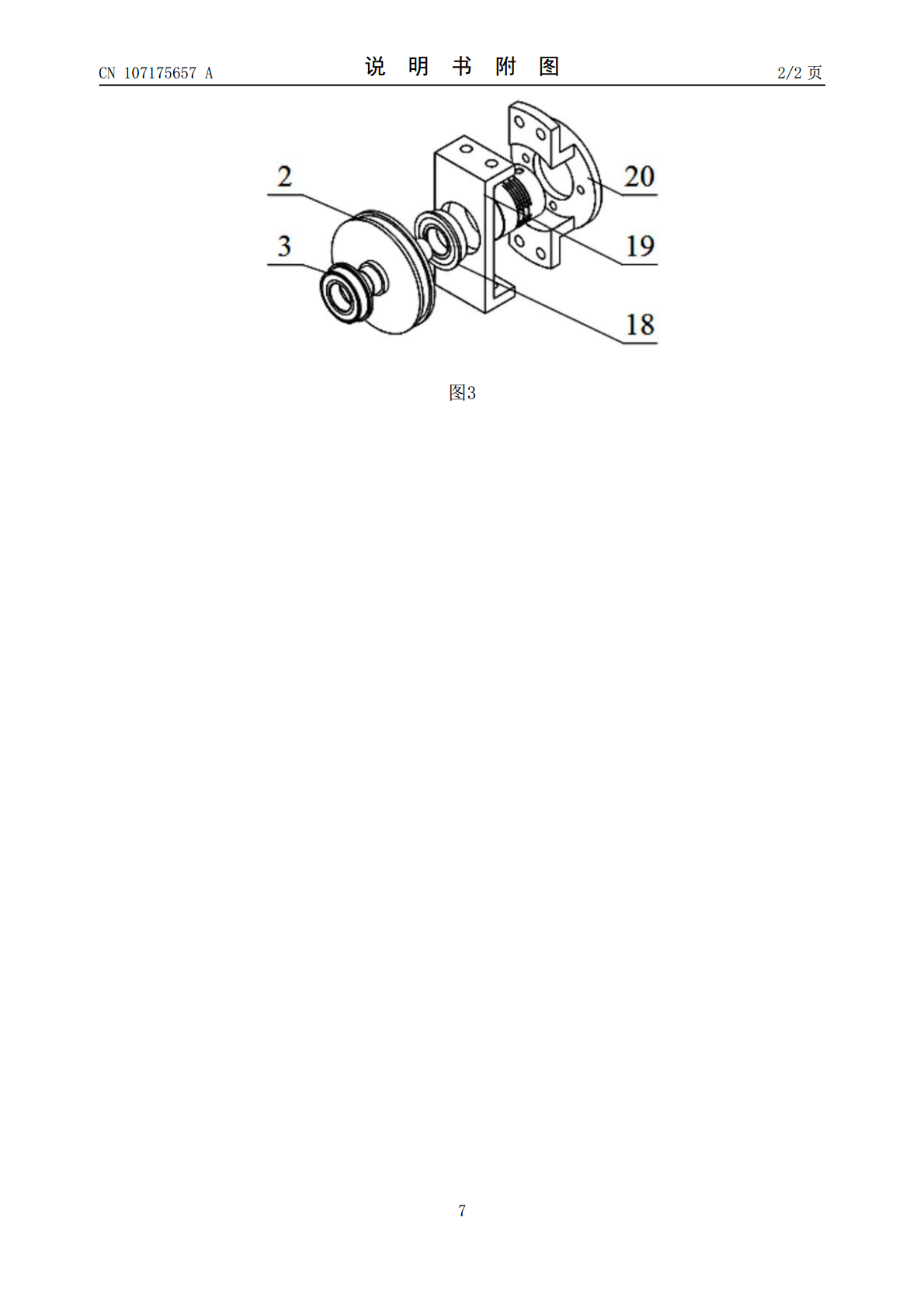
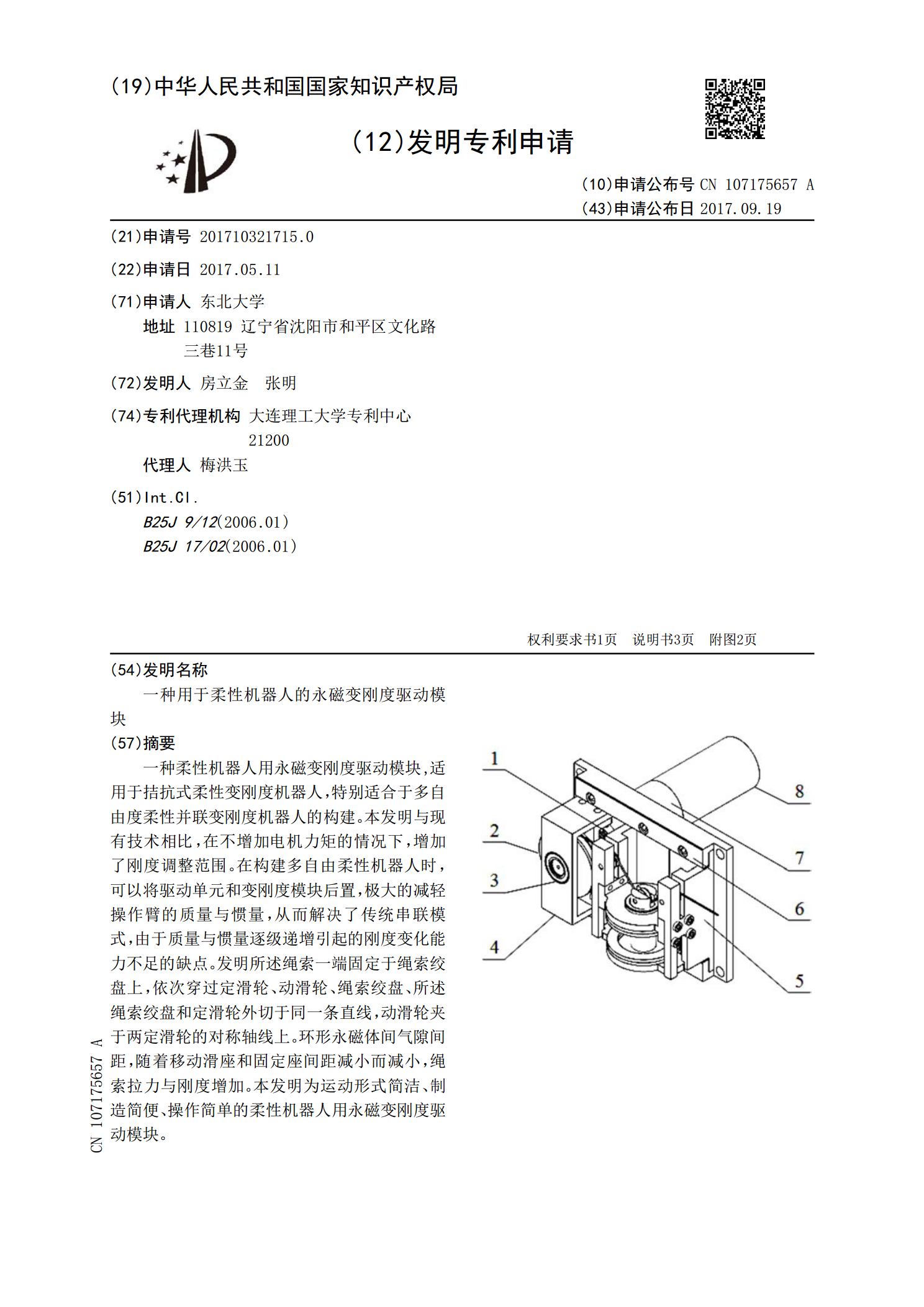
一种柔性机器人用永磁变刚度驱动模块,适用于拮抗式柔性变刚度机器人,特别适合于多自由度柔性并联变刚度机器人的构建。本发明与现有技术相比,在不增加电机力矩的情况下,增加了刚度调整范围。在构建多自由柔性机器人时,可以将驱动单元和变刚度模块后置,极大的减轻操作臂的质量与惯量,从而解决了传统串联模式,由于质量与惯量逐级递增引起的刚度变化能力不足的缺点。发明所述绳索一端固定于绳索绞盘上,依次穿过定滑轮、动滑轮、绳索绞盘、所述绳索绞盘和定滑轮外切于同一条直线,动滑轮夹于两定滑轮的对称轴线上。环形永磁体间气隙间距,随着移
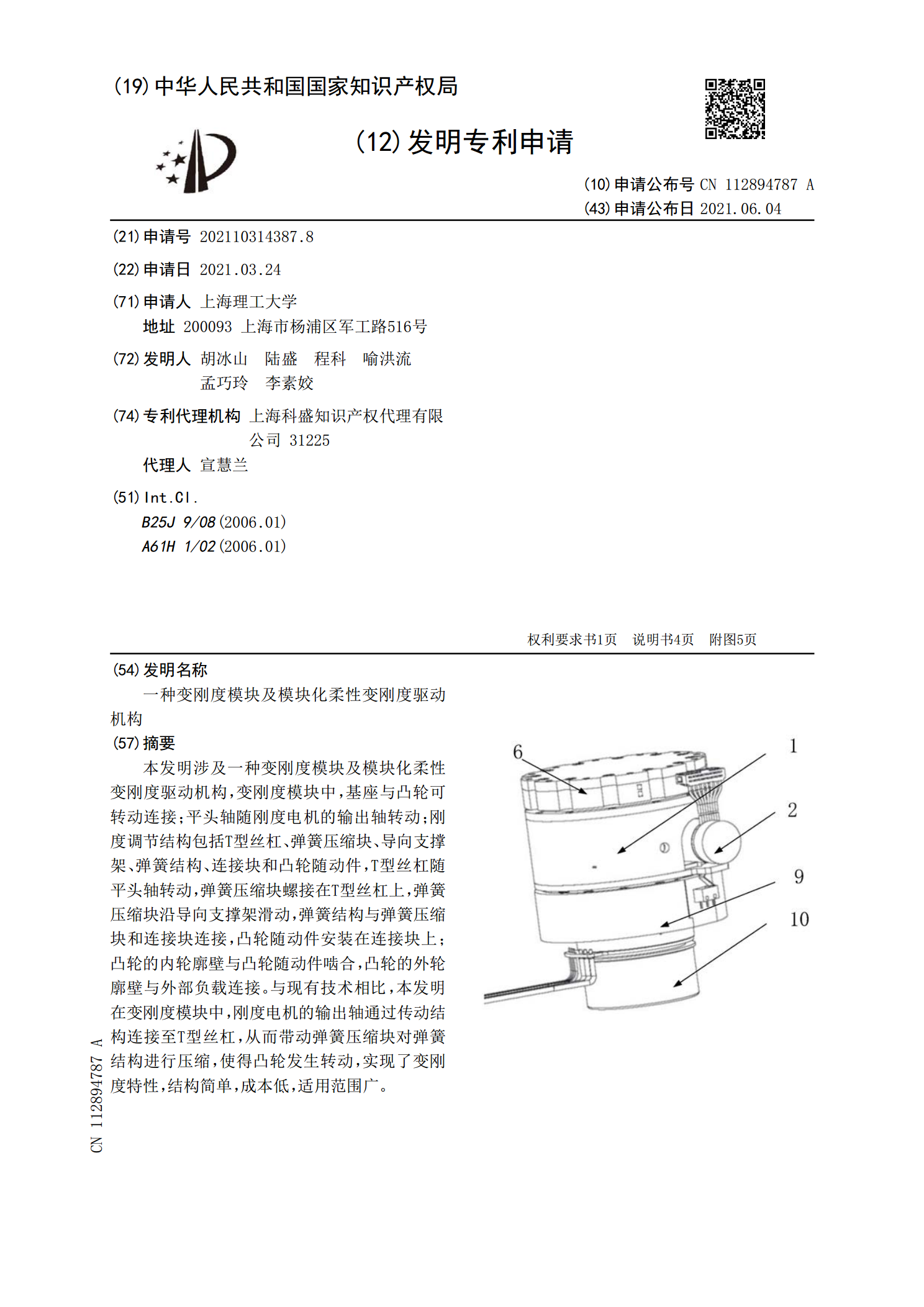
一种变刚度模块及模块化柔性变刚度驱动机构.pdf
本发明涉及一种变刚度模块及模块化柔性变刚度驱动机构,变刚度模块中,基座与凸轮可转动连接;平头轴随刚度电机的输出轴转动;刚度调节结构包括T型丝杠、弹簧压缩块、导向支撑架、弹簧结构、连接块和凸轮随动件,T型丝杠随平头轴转动,弹簧压缩块螺接在T型丝杠上,弹簧压缩块沿导向支撑架滑动,弹簧结构与弹簧压缩块和连接块连接,凸轮随动件安装在连接块上;凸轮的内轮廓壁与凸轮随动件啮合,凸轮的外轮廓壁与外部负载连接。与现有技术相比,本发明在变刚度模块中,刚度电机的输出轴通过传动结构连接至T型丝杠,从而带动弹簧压缩块对弹簧结构进
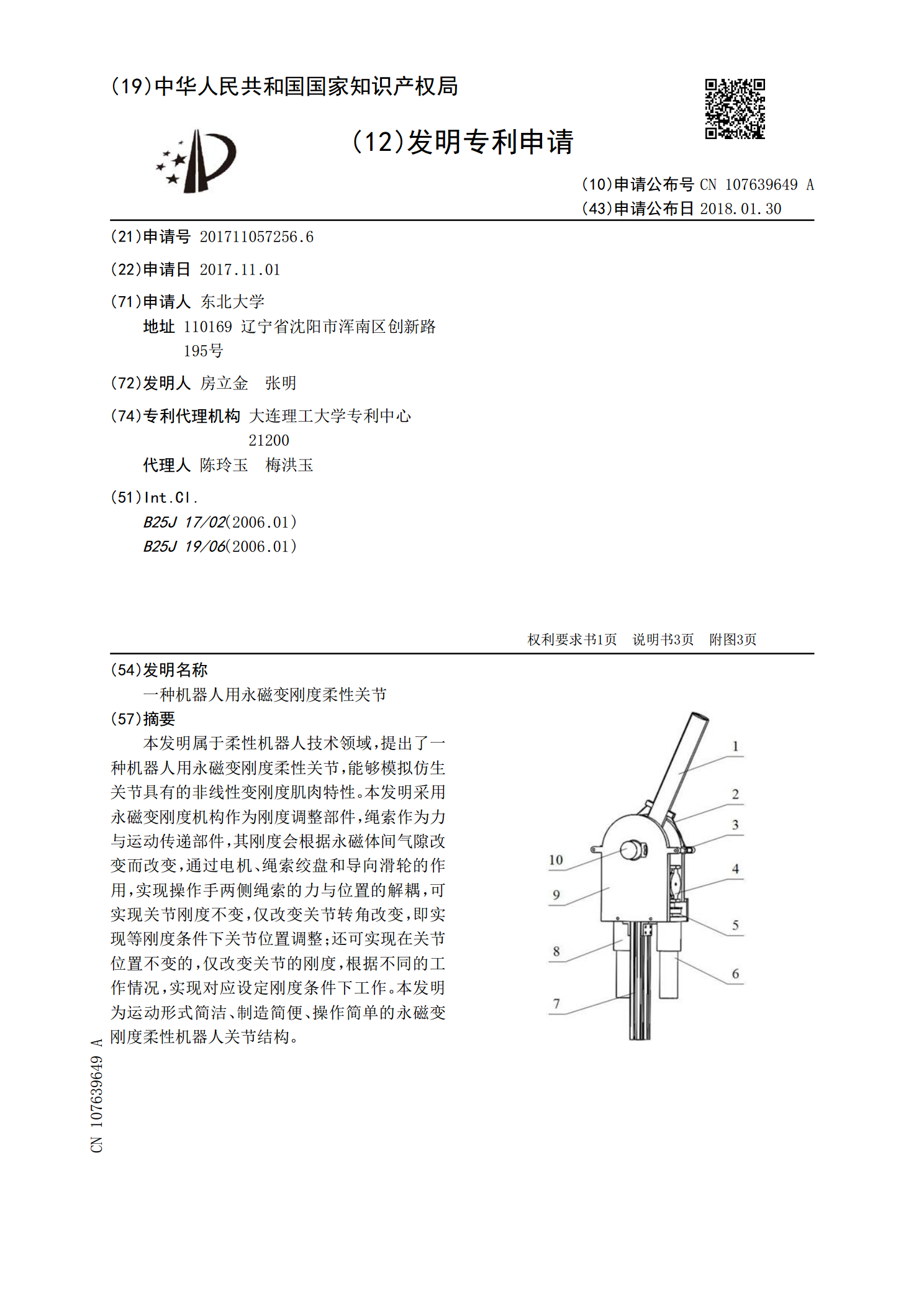
一种机器人用永磁变刚度柔性关节.pdf
本发明属于柔性机器人技术领域,提出了一种机器人用永磁变刚度柔性关节,能够模拟仿生关节具有的非线性变刚度肌肉特性。本发明采用永磁变刚度机构作为刚度调整部件,绳索作为力与运动传递部件,其刚度会根据永磁体间气隙改变而改变,通过电机、绳索绞盘和导向滑轮的作用,实现操作手两侧绳索的力与位置的解耦,可实现关节刚度不变,仅改变关节转角改变,即实现等刚度条件下关节位置调整;还可实现在关节位置不变的,仅改变关节的刚度,根据不同的工作情况,实现对应设定刚度条件下工作。本发明为运动形式简洁、制造简便、操作简单的永磁变刚度柔性机
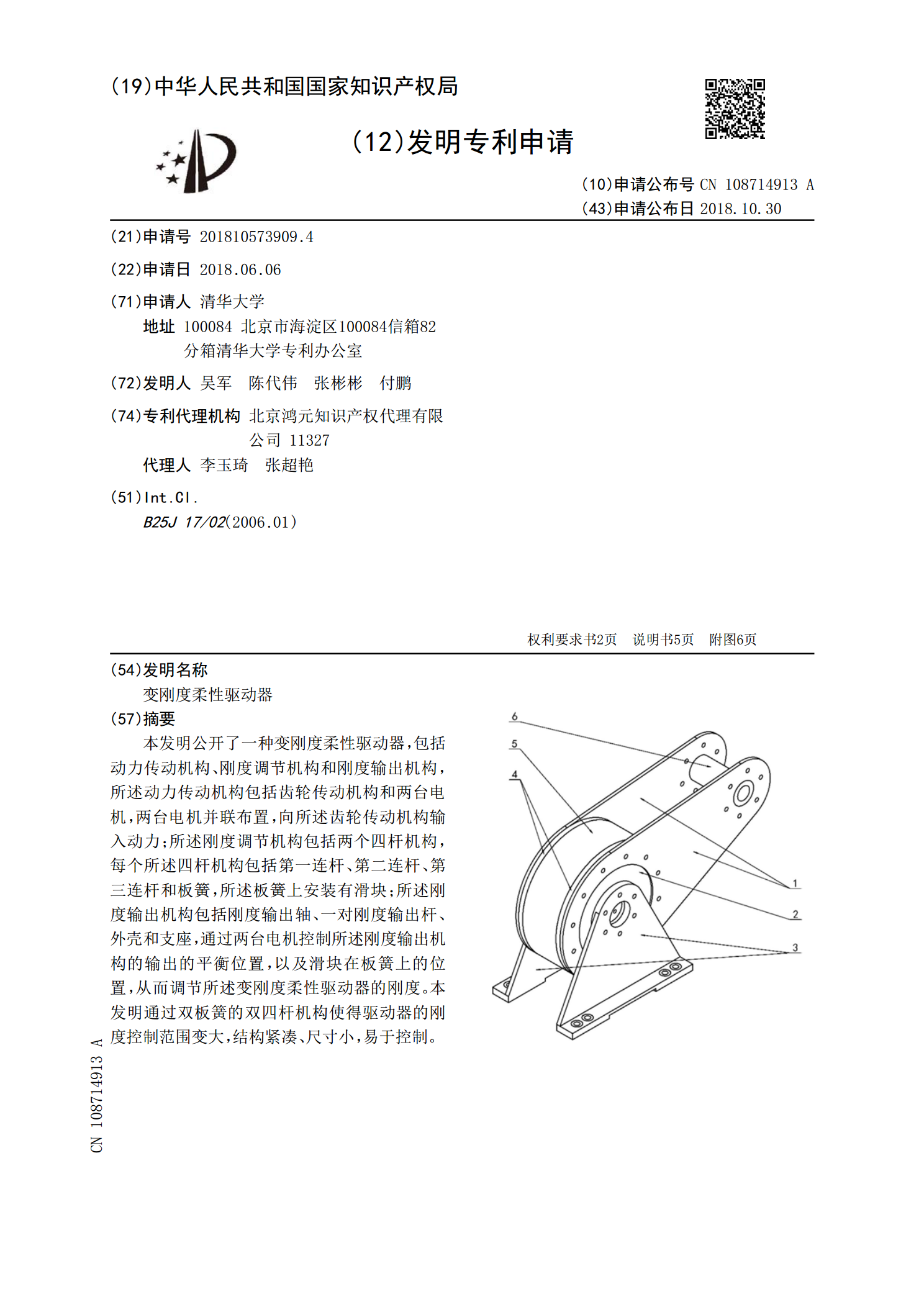
变刚度柔性驱动器.pdf
本发明公开了一种变刚度柔性驱动器,包括动力传动机构、刚度调节机构和刚度输出机构,所述动力传动机构包括齿轮传动机构和两台电机,两台电机并联布置,向所述齿轮传动机构输入动力;所述刚度调节机构包括两个四杆机构,每个所述四杆机构包括第一连杆、第二连杆、第三连杆和板簧,所述板簧上安装有滑块;所述刚度输出机构包括刚度输出轴、一对刚度输出杆、外壳和支座,通过两台电机控制所述刚度输出机构的输出的平衡位置,以及滑块在板簧上的位置,从而调节所述变刚度柔性驱动器的刚度。本发明通过双板簧的双四杆机构使得驱动器的刚度控制范围变大,
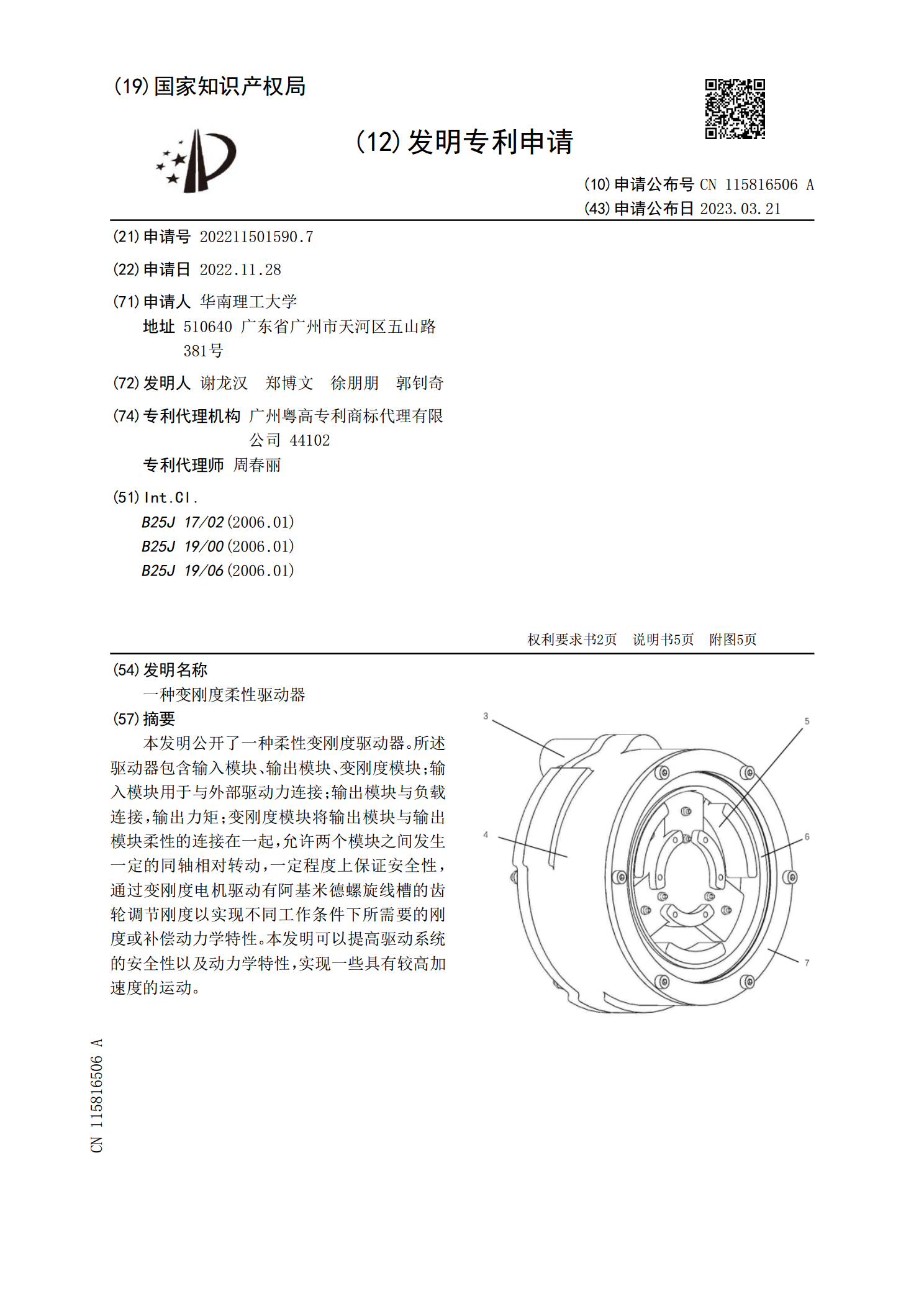
一种变刚度柔性驱动器.pdf
本发明公开了一种柔性变刚度驱动器。所述驱动器包含输入模块、输出模块、变刚度模块;输入模块用于与外部驱动力连接;输出模块与负载连接,输出力矩;变刚度模块将输出模块与输出模块柔性的连接在一起,允许两个模块之间发生一定的同轴相对转动,一定程度上保证安全性,通过变刚度电机驱动有阿基米德螺旋线槽的齿轮调节刚度以实现不同工作条件下所需要的刚度或补偿动力学特性。本发明可以提高驱动系统的安全性以及动力学特性,实现一些具有较高加速度的运动。