
变刚度柔性驱动器.pdf

灵慧****89

1/10
2/10

3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共14页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
变刚度柔性驱动器.pdf
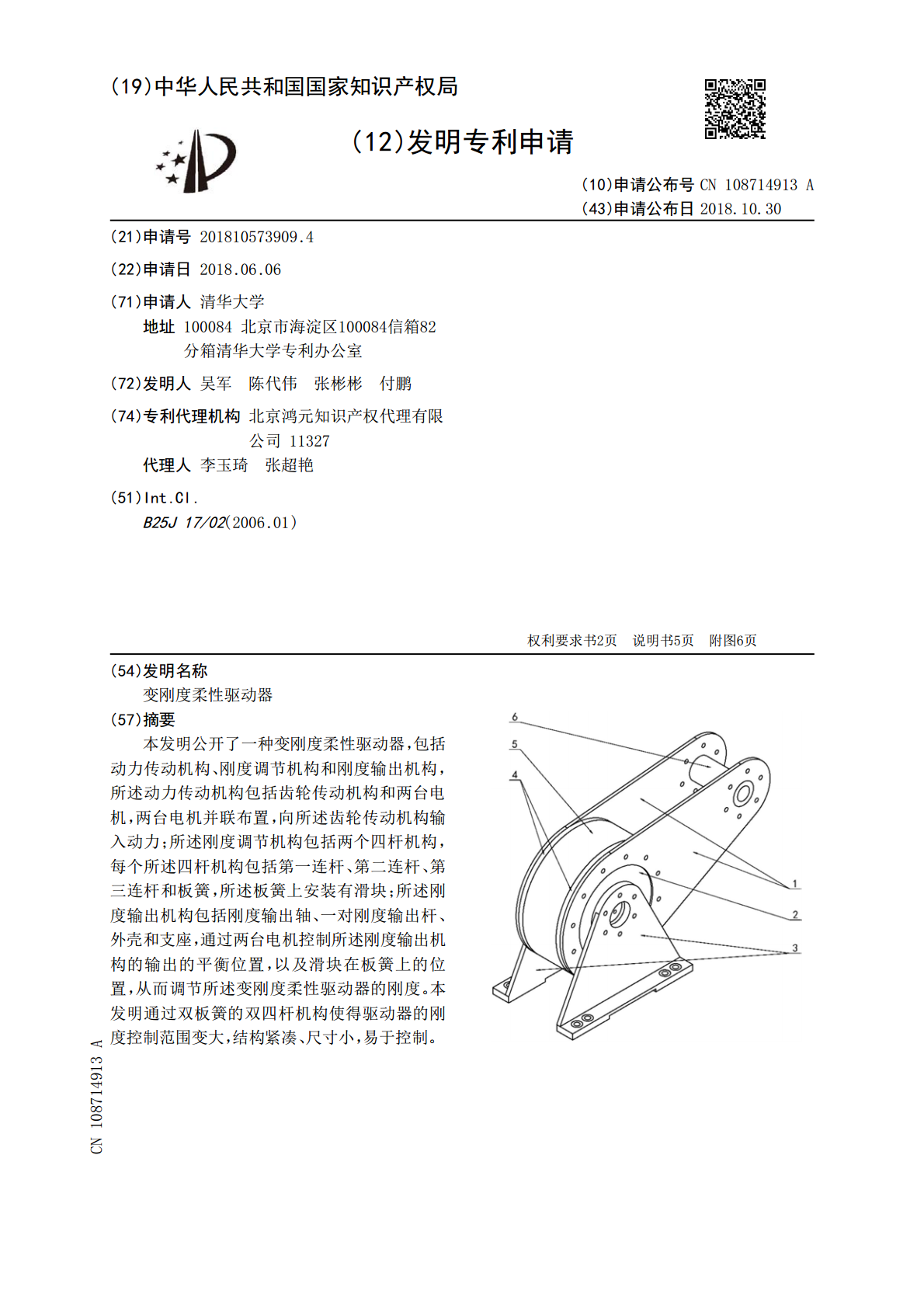
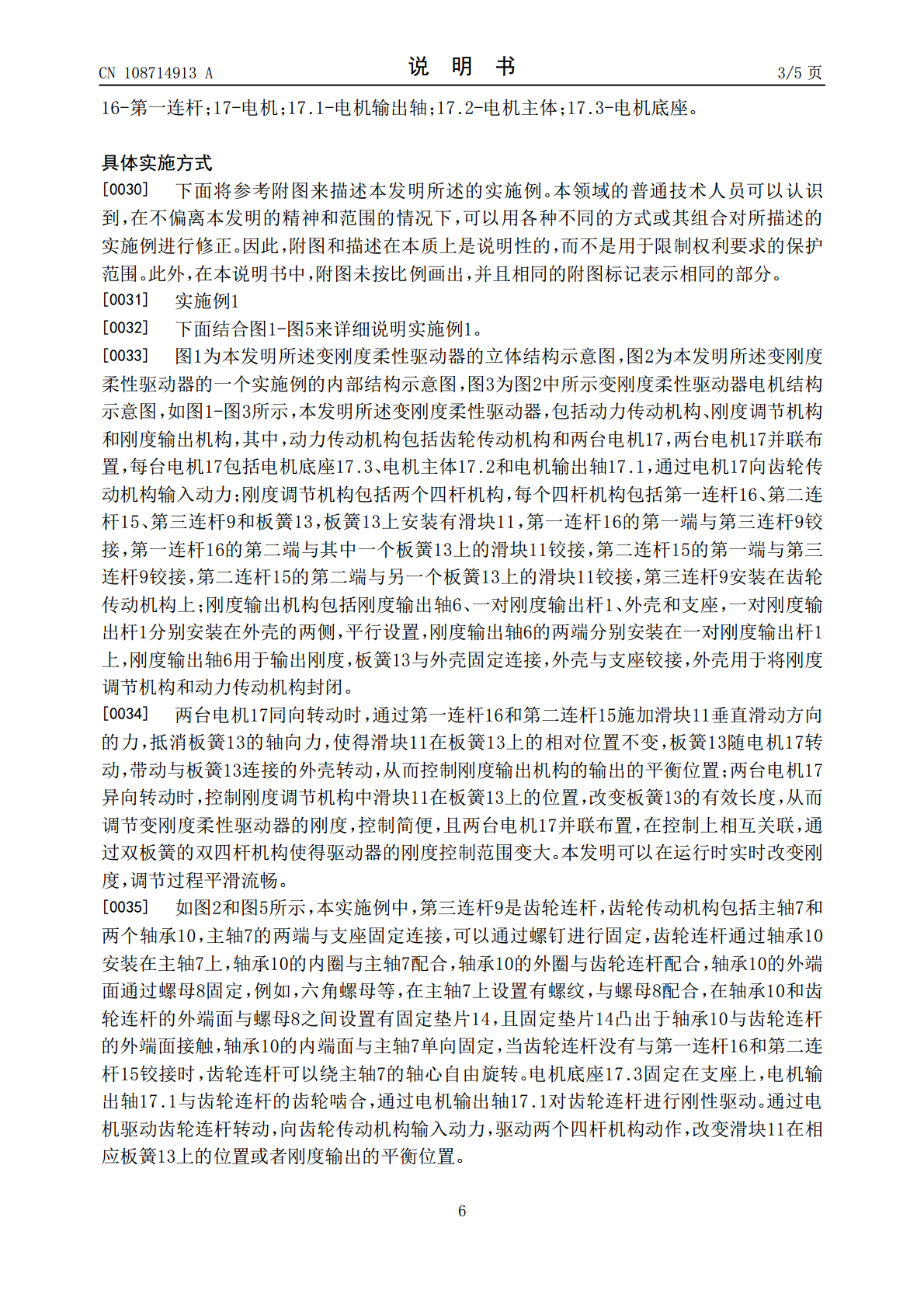
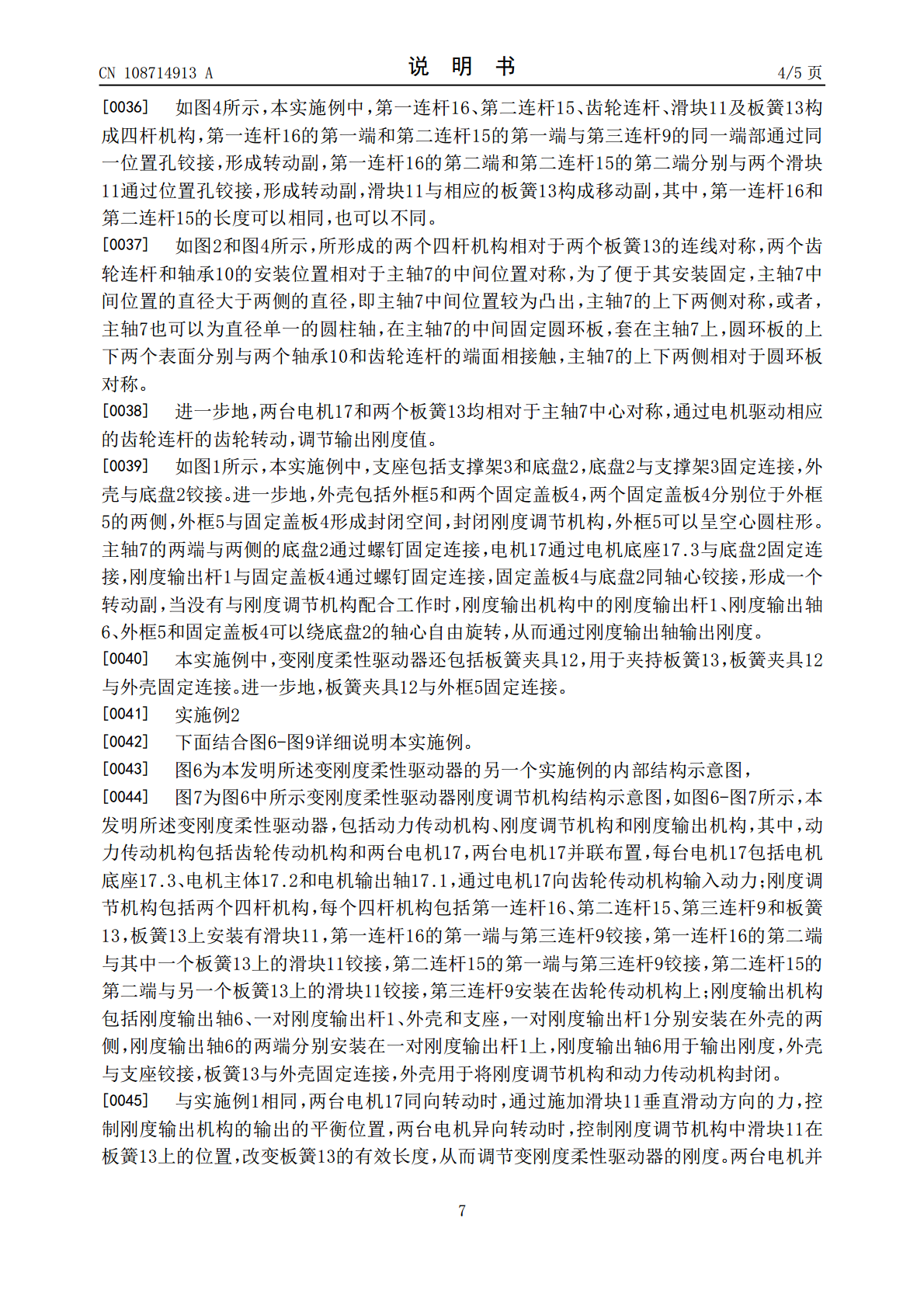
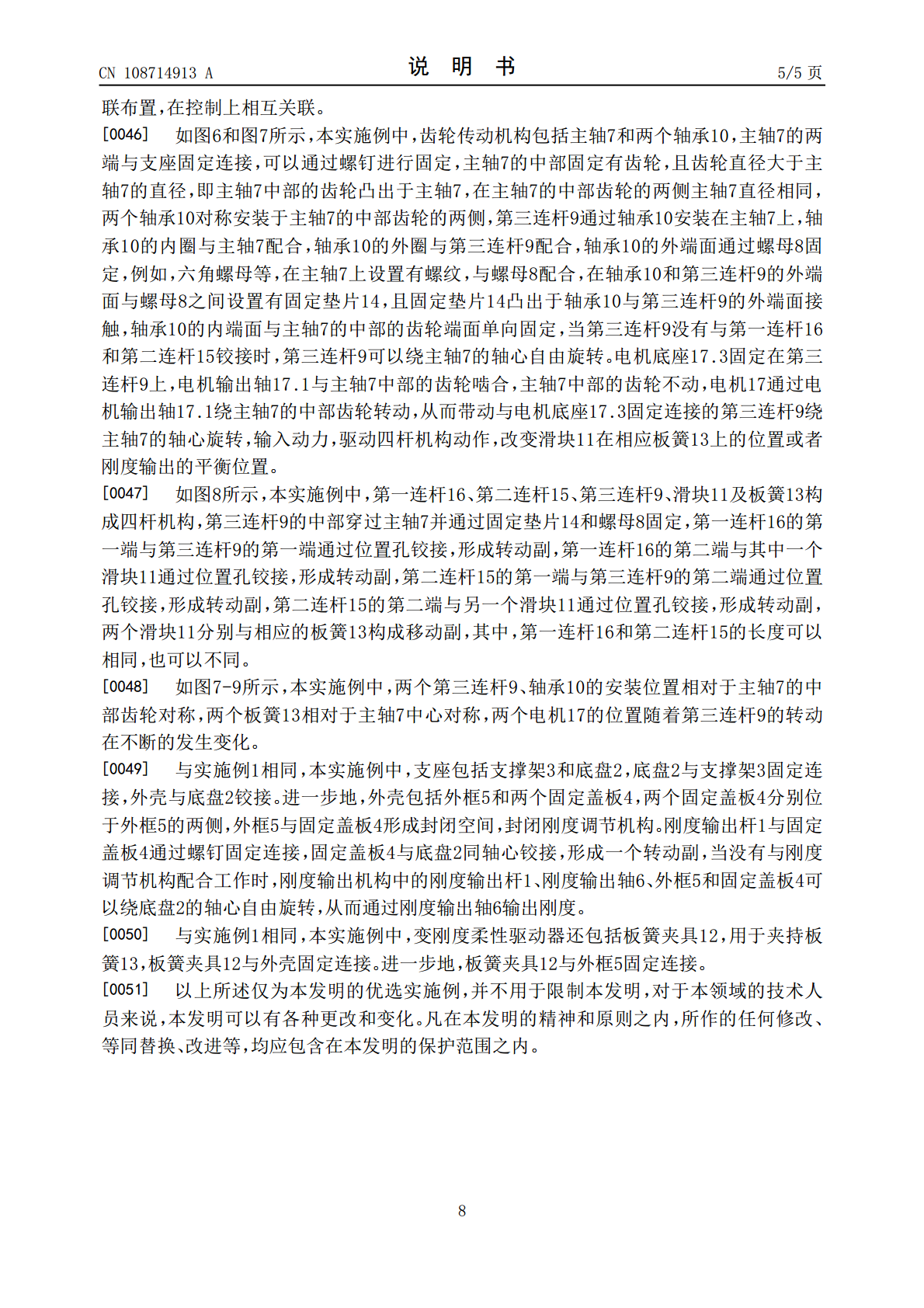
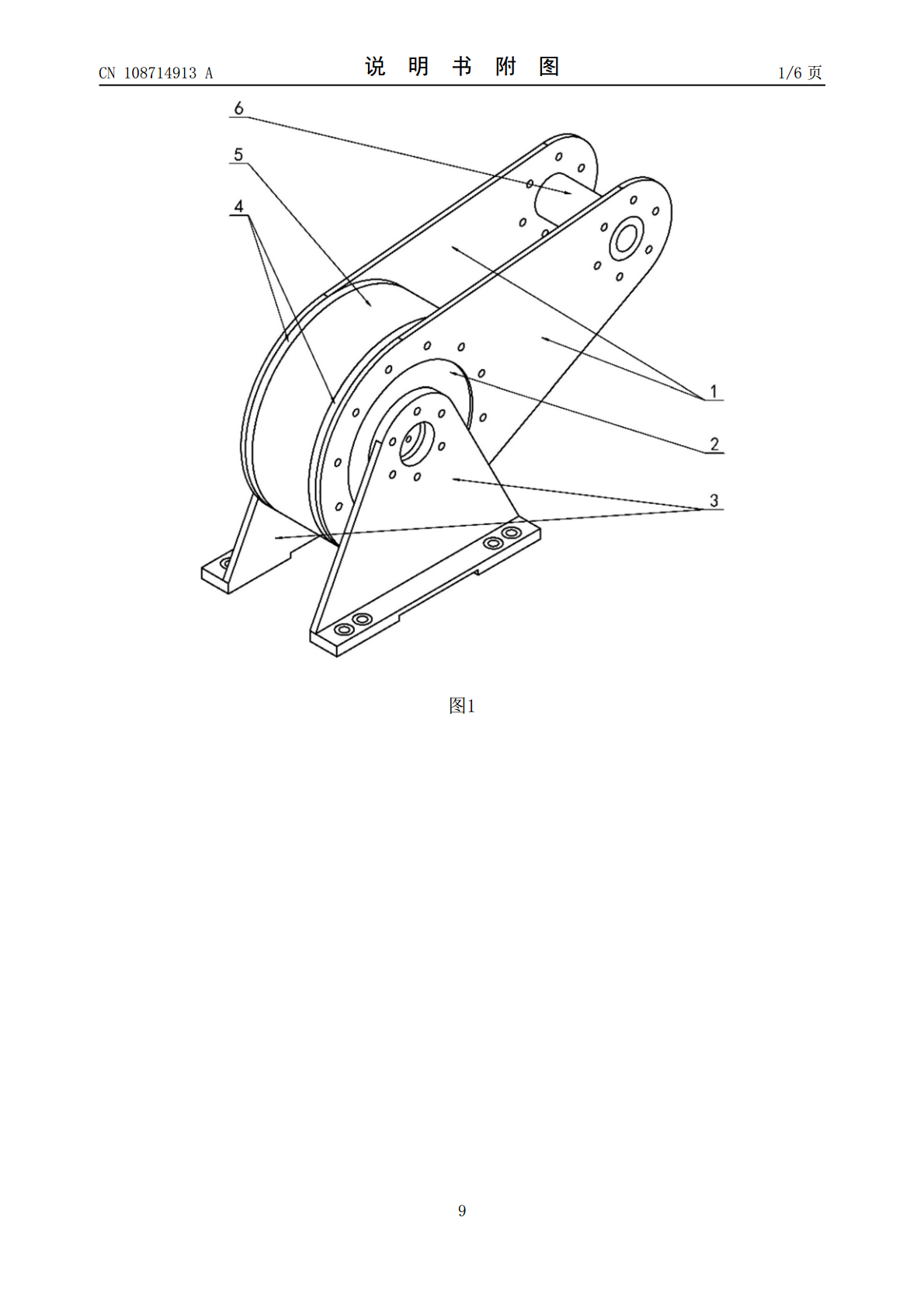
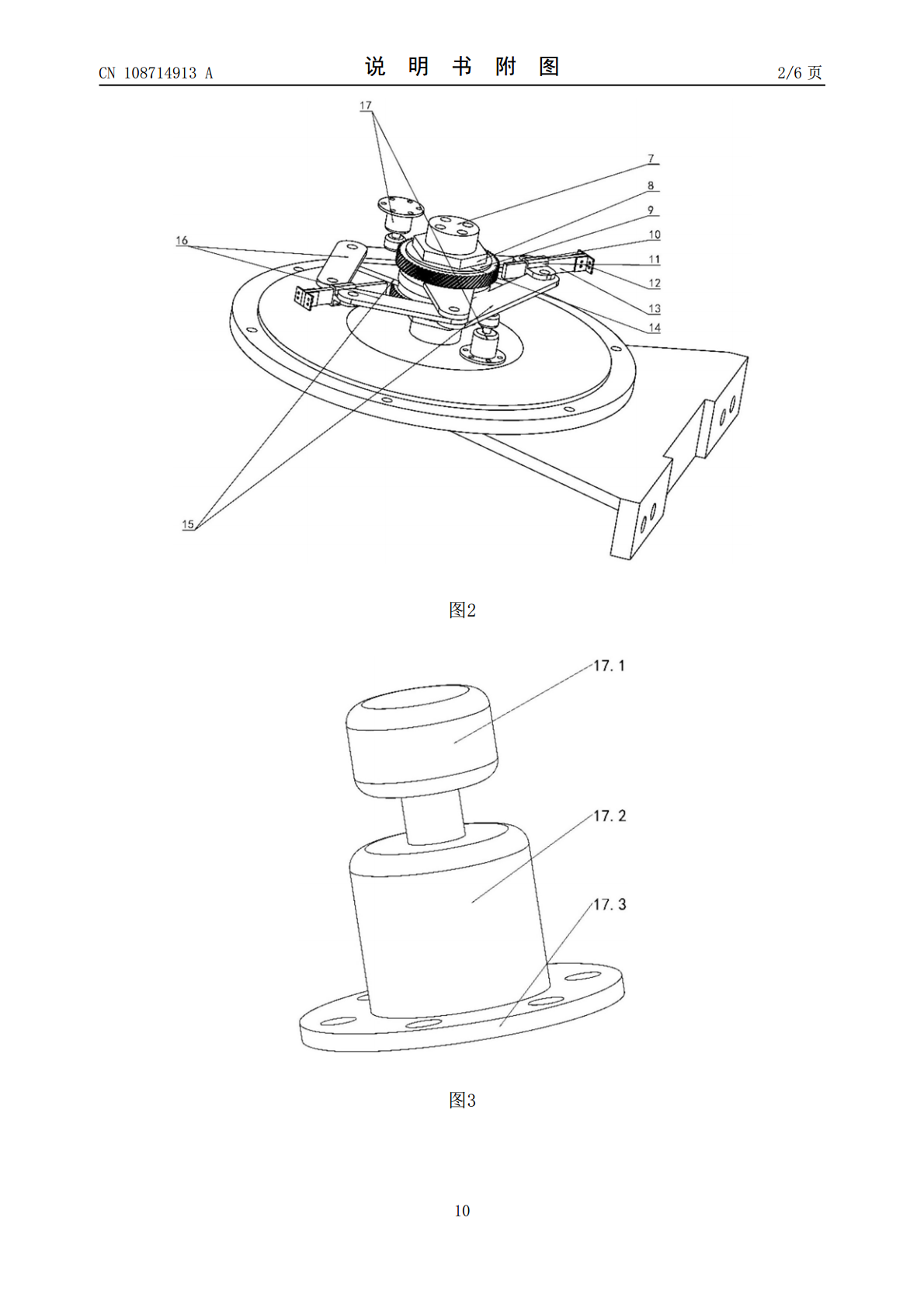
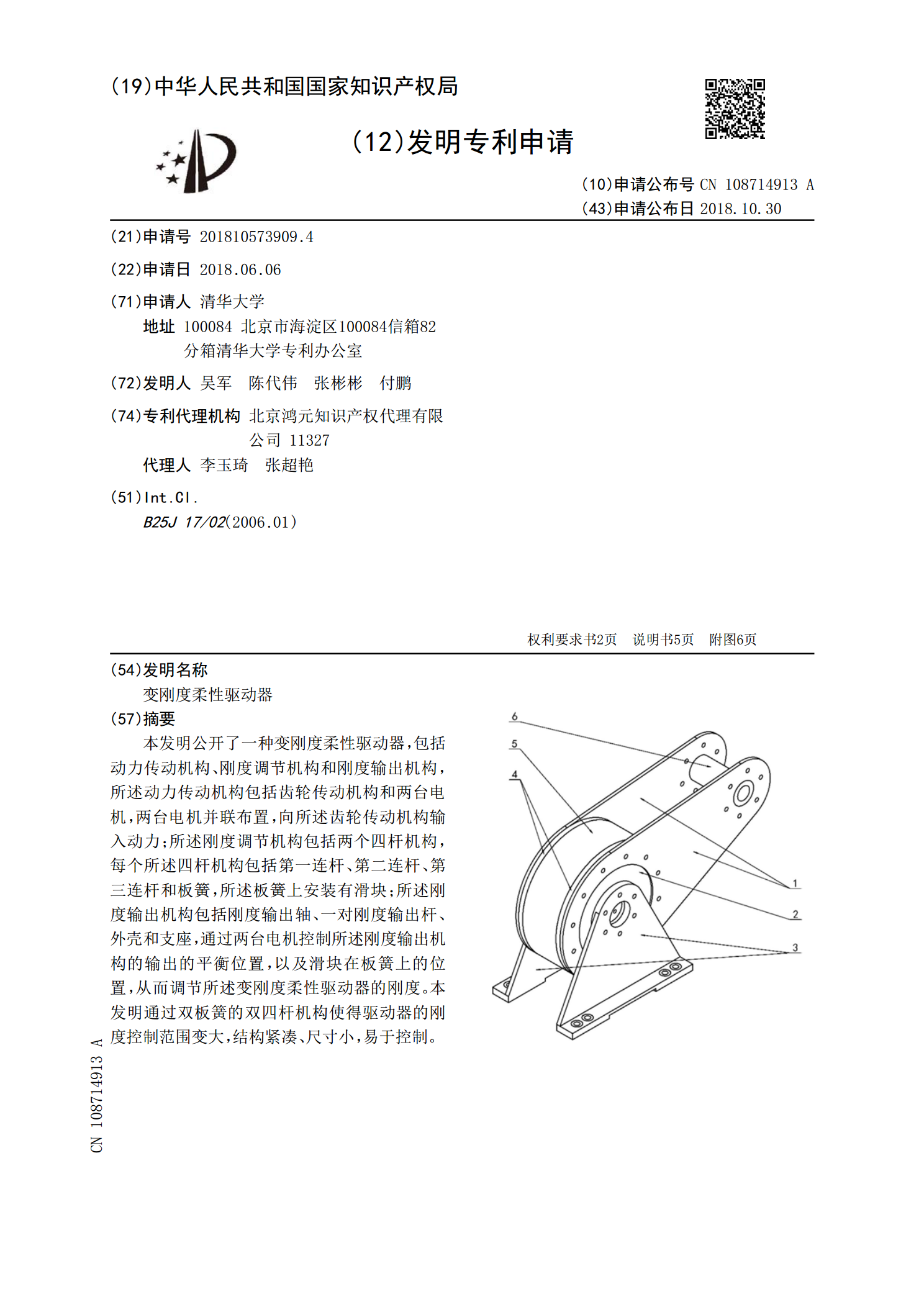
本发明公开了一种变刚度柔性驱动器,包括动力传动机构、刚度调节机构和刚度输出机构,所述动力传动机构包括齿轮传动机构和两台电机,两台电机并联布置,向所述齿轮传动机构输入动力;所述刚度调节机构包括两个四杆机构,每个所述四杆机构包括第一连杆、第二连杆、第三连杆和板簧,所述板簧上安装有滑块;所述刚度输出机构包括刚度输出轴、一对刚度输出杆、外壳和支座,通过两台电机控制所述刚度输出机构的输出的平衡位置,以及滑块在板簧上的位置,从而调节所述变刚度柔性驱动器的刚度。本发明通过双板簧的双四杆机构使得驱动器的刚度控制范围变大,
一种变刚度柔性驱动器.pdf
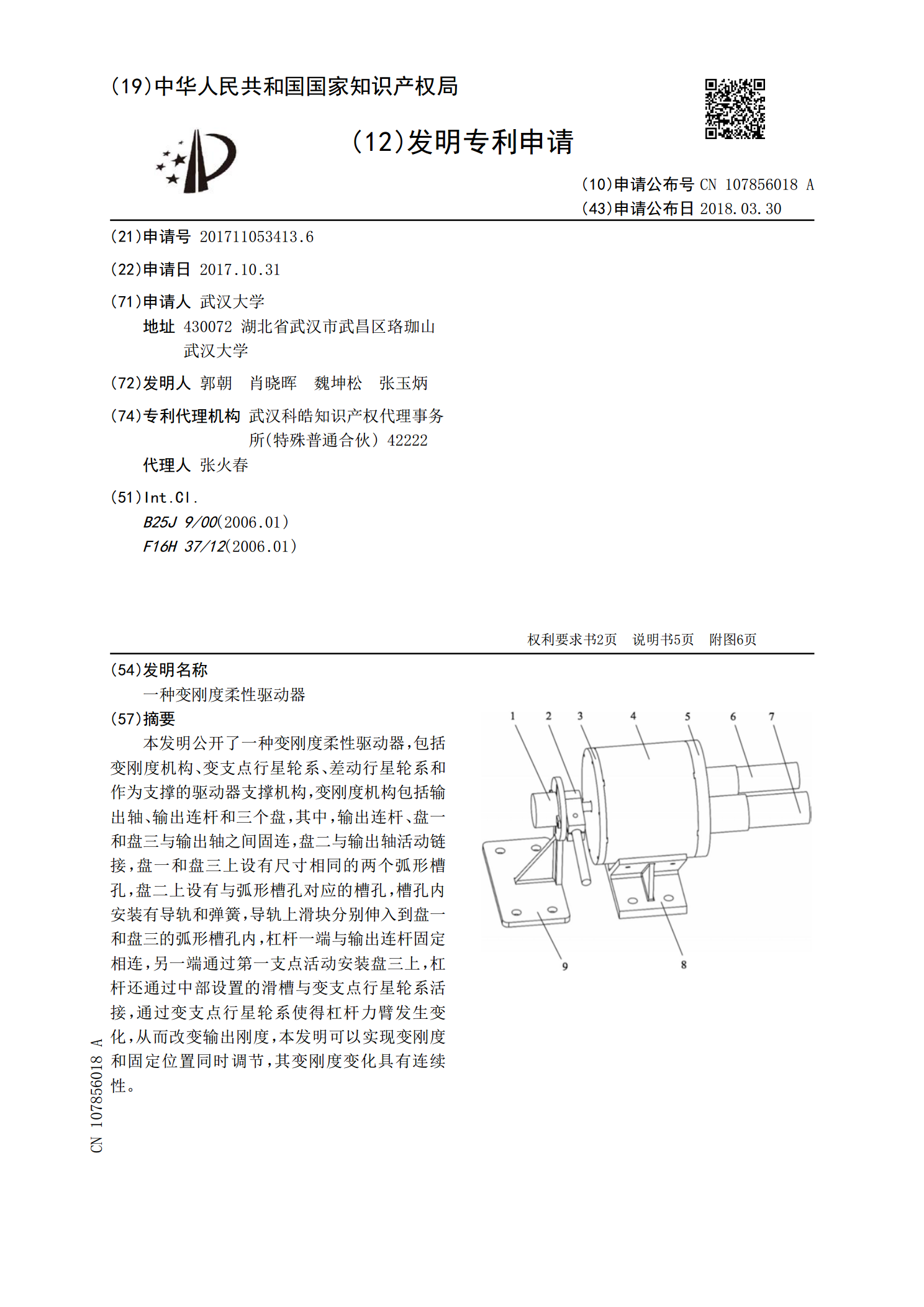
本发明公开了一种变刚度柔性驱动器,包括变刚度机构、变支点行星轮系、差动行星轮系和作为支撑的驱动器支撑机构,变刚度机构包括输出轴、输出连杆和三个盘,其中,输出连杆、盘一和盘三与输出轴之间固连,盘二与输出轴活动链接,盘一和盘三上设有尺寸相同的两个弧形槽孔,盘二上设有与弧形槽孔对应的槽孔,槽孔内安装有导轨和弹簧,导轨上滑块分别伸入到盘一和盘三的弧形槽孔内,杠杆一端与输出连杆固定相连,另一端通过第一支点活动安装盘三上,杠杆还通过中部设置的滑槽与变支点行星轮系活接,通过变支点行星轮系使得杠杆力臂发生变化,从而改变输
一种变刚度柔性驱动器.pdf
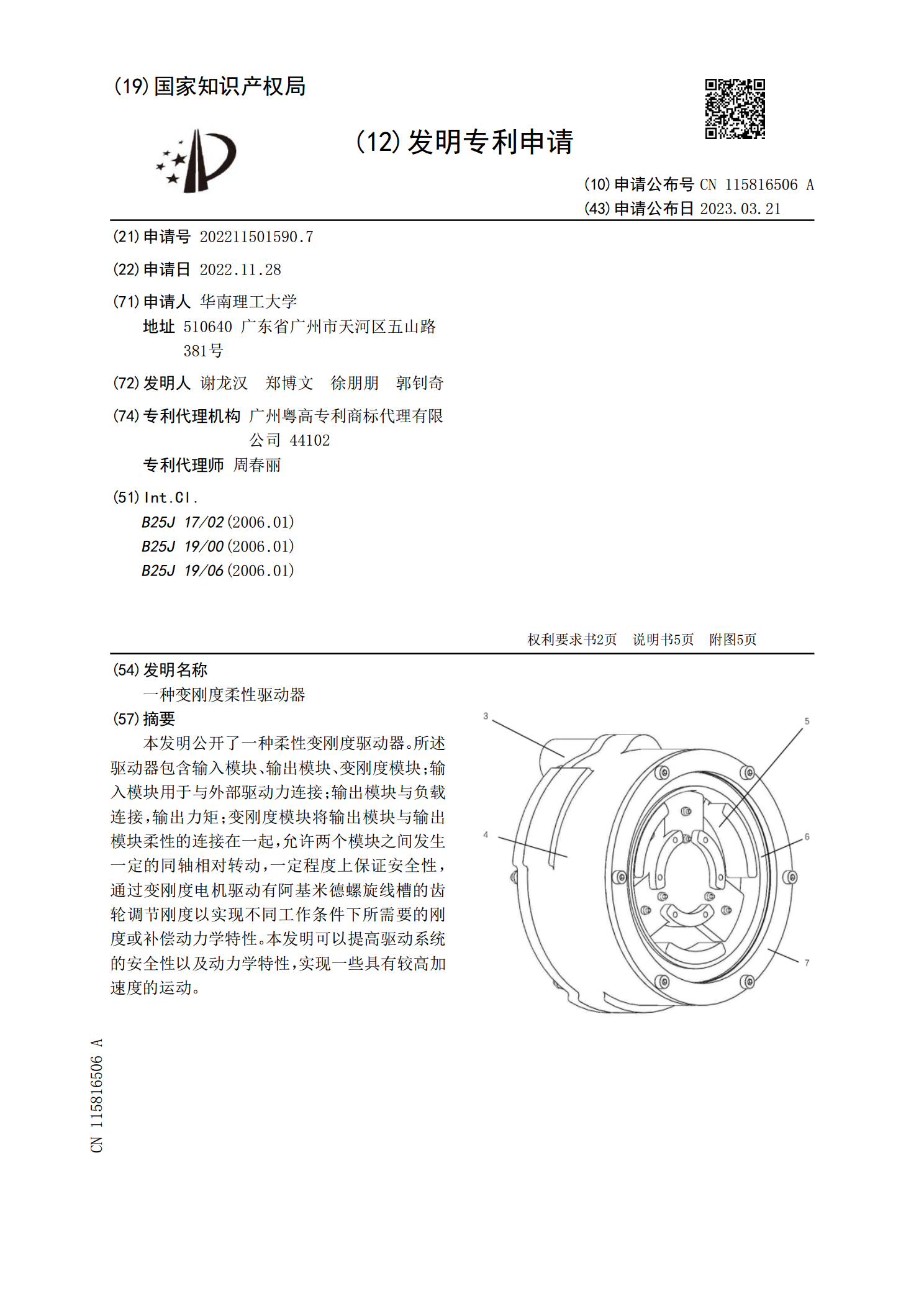
本发明公开了一种柔性变刚度驱动器。所述驱动器包含输入模块、输出模块、变刚度模块;输入模块用于与外部驱动力连接;输出模块与负载连接,输出力矩;变刚度模块将输出模块与输出模块柔性的连接在一起,允许两个模块之间发生一定的同轴相对转动,一定程度上保证安全性,通过变刚度电机驱动有阿基米德螺旋线槽的齿轮调节刚度以实现不同工作条件下所需要的刚度或补偿动力学特性。本发明可以提高驱动系统的安全性以及动力学特性,实现一些具有较高加速度的运动。

基于可变支点的对称式变刚度柔性驱动器.pdf
本发明公开了一种基于可变支点的对称式变刚度柔性驱动器,包括动力输入机构、动力输出机构和两套刚度调节结构,所述两套刚度调节结构沿动力输出机构的中心对称布置,采用了带有阿基米德螺旋曲线槽的齿轮来调节支点,改变杠杆力臂长度。能够实现刚度的大范围调节,使驱动器能够从零刚度调整到完全刚性,并且使得结构更加紧凑,且通过移动支点改变刚度,更易于控制,能够实现驱动器的输出位置和输出刚度的实时同步的调节。
柔性变刚度驱动器以及虚拟现实交互设备.pdf
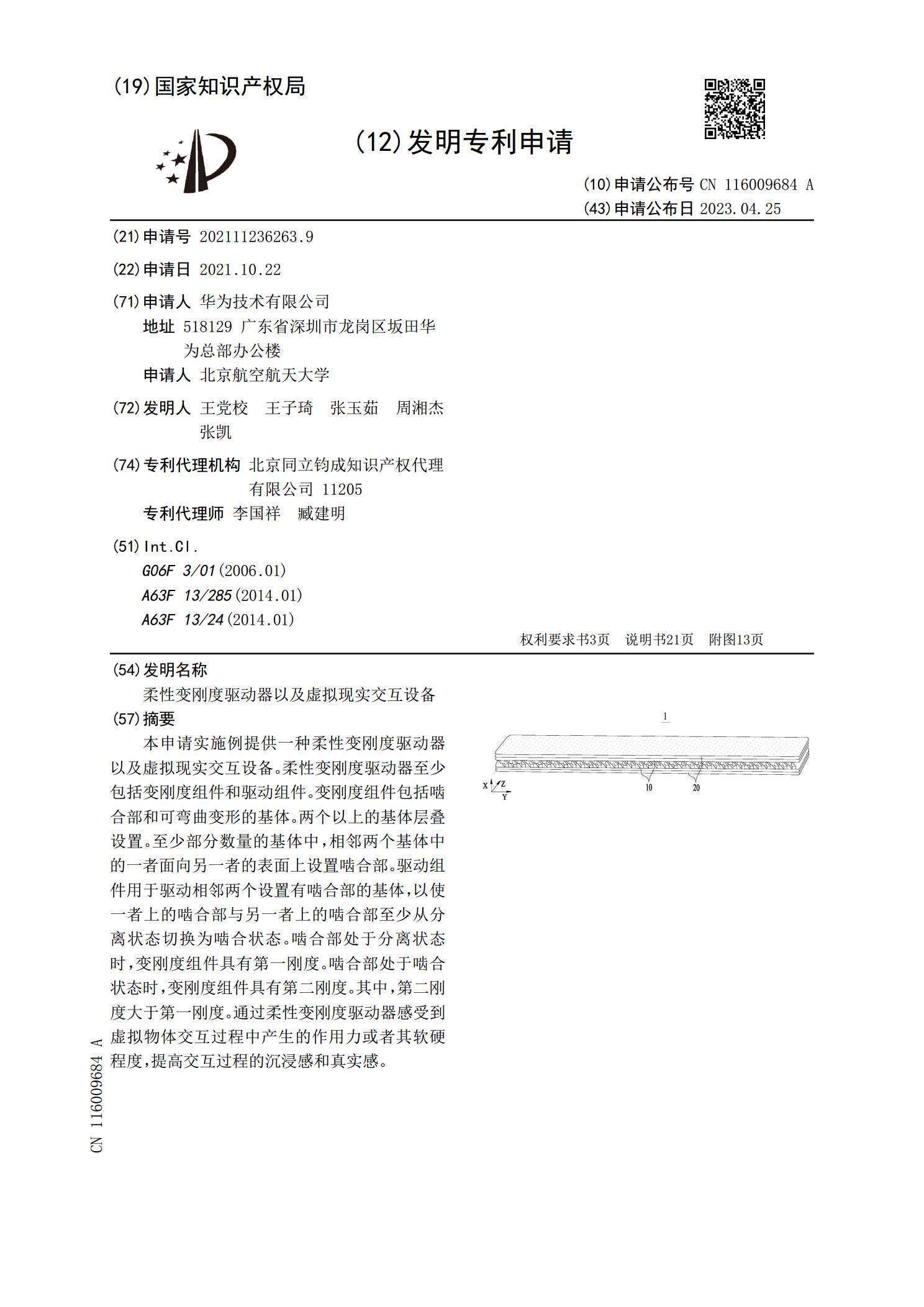
本申请实施例提供一种柔性变刚度驱动器以及虚拟现实交互设备。柔性变刚度驱动器至少包括变刚度组件和驱动组件。变刚度组件包括啮合部和可弯曲变形的基体。两个以上的基体层叠设置。至少部分数量的基体中,相邻两个基体中的一者面向另一者的表面上设置啮合部。驱动组件用于驱动相邻两个设置有啮合部的基体,以使一者上的啮合部与另一者上的啮合部至少从分离状态切换为啮合状态。啮合部处于分离状态时,变刚度组件具有第一刚度。啮合部处于啮合状态时,变刚度组件具有第二刚度。其中,第二刚度大于第一刚度。通过柔性变刚度驱动器感受到虚拟物体交互过